
Динамические свойства ЭМ как элемента дискретного действия характеризуются двумя временными параметрами: временем срабатывания tсраб и временем отпускания tотп.








Время от подачи входного напряжения на зажимы обмотки ЭМ до полного притяжения якоря (δ = δК) называют временем срабатывания tcpa б , а время от снятия входного напряжения до возвращения якоря в начальное положение (δ = δН) — временем отпускания tотп.
Если ввести обозначения tтр и tт'р для времени трогания соответственно при срабатывании (время от подачи входного напряжения U до начала движения, трогания якоря) и отпускании (от снятия U до начала движения якоря), можно записать:

где tдв, t ’дв — время движения якоря соответственно от δН до δК, и наоборот.
Значения tcpa 6 и t ОТП обычно равны 0,05...0,15 с для ЭМ нормального быстродействия.
Увеличить или уменьшить tсраб и tотп можно конструктивными и схемными способами. Конструктивные способы увеличения и уменьшения быстродействия ЭМ заключаются в следующем.
Снижение tсраб и tom п достигается уменьшением вихревых токов в магнитопроводе и хода якоря, равного δН - δК; выбором достаточно большого коэффициента запаса при срабатывании k зсрлб = Iуст/Iсраб (чем больше Kз.сраб, тем надежнее удерживается якорь в притянутом положении); оптимизацией размеров обмотки и другими методами.
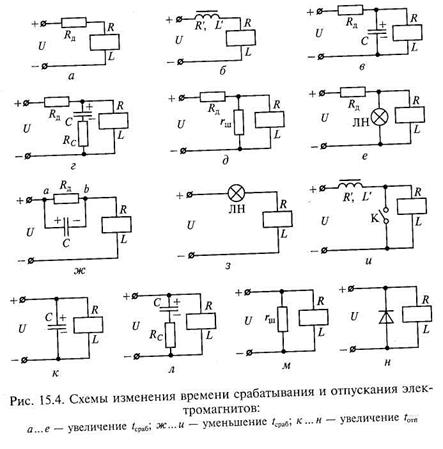
Увеличение tсраб и tотп осуществляется с помощью электромагнитных, механических, пневматических и гидравлических демпферов, присоединяемых к якорю.
Электромагнитные демпферы выполняют в виде конструктивных элементов, изготовленных из электропроводящего материала и помещенных в магнитное поле (например, в счетчике электроэнергии в поле постоянного магнита вращающийся алюминиевый диск). Если требуется получить fcpa6 и tmn порядка одной или нескольких секунд, то прибегают к экранированию: на сердечнике размещают медную втулку, охватывающую все его сечение; возникающий при движении якоря ток экрана замедляет нарастание и спадание потока в магнитопроводе.
На рис. 15.4 показаны некоторые схемные способы изменения tсраб и tотп. Приведенные схемы обеспечивают стабильное снижение tсраб нормальных по быстродействию ЭМ до нескольких миллисекунд или увеличение их tотп до нескольких секунд.
15.5. Электромагниты переменного тока
Тяговая характеристика. Якорь ЭМ притягивается к сердечнику при подаче в обмотку как постоянного, так и переменного тока. Считая поток в магнитопроводе синусоидальным, что справедливо при синусоидальном напряжении на зажимах обмотки с пренебрежимо малым активным сопротивлением, по формуле Максвелла найдем выражение для тягового усилия:

где Фδ — магнитный поток в воздушном зазоре; S — поперечное сечение воздушного зазора; ω — круговая частота питающего тока; (Qтmах = Ф2mах/(2μ0S) — амплитуда тягового усилия, неизменного по знаку и пульсирующего с удвоенной частотой (рис. 15.5).
Притяжение якоря определяется средним значением тягового усилия Qtmed, т.е. его постоянной составляющей (см. рис. 15.5, а). Пульсирующее тяговое усилие можно представить в виде двух составляющих следующим образом:

где QTmed = 0,5QTmax = Ф2mах/(4μ0S) — постоянная составляющая, т.е. среднее значение тягового усилия; QT ~ = 0,5QTmaxcos 2ωt = QTmed cos 2ωt — переменная составляющая.
Из сравнения QTmed и QT следует, что при Фmах = Фδ постоянная составляющая тягового усилия ЭМ переменного тока в два раза меньше тягового усилия ЭМ постоянного тока. Значит в общем случае ЭМ постоянного тока при прочих равных условиях развивает большую силу притяжения, чем ЭМ переменного тока.
Если при постоянном (установившемся) напряжении

то при переменном напряжении, так как от δ зависит индуктивность L ,

где F— тяговое усилие; w — число витков в обмотке; U — напряжение питания магнита; z — полное сопротивление обмотки; R — активное сопротивление обмотки; δ — воздушный зазор.
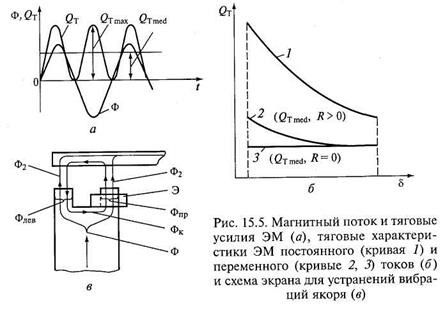
Разной зависимостью от 8 объясняется различие статических тяговых характеристик ЭМ постоянного и переменного токов, показанных на рис. 15.5, б. Если тяговая характеристика 1 электромагнита постоянного тока круто поднимается с уменьшением δ, то тяговая характеристика 2 электромагнита, работающего на переменном токе, более пологая из-за роста индуктивности обмотки. Если R = 0, то согласно второму закону Кирхгофа приложенное к обмотке напряжение уравновешивается только ЭДС самоиндукции (е), т.е.

При Umax = const и, следовательно, Фmах = const и Фmах ≠ f(δ) тяговая характеристика ЭМ имеет вид горизонтальной прямой 3. Таким образом, форма тяговой характеристики ЭМ переменного тока зависит от соотношения активного R и индуктивного XL сопротивлений цепи его обмотки.
Способы устранения вибрации якоря. Как видно из рис. 15.5, а, в некоторые моменты времени тяговое усилие QT обращается в нуль. При наличии противодействующей силы QMex, изменяющейся в соответствии с механической характеристикой ЭМ и стремящейся оторвать якорь от сердечника, это может привести к вибрации якоря: когда QMex > QT якорь отходит от сердечника, а при QT > QMex снова притягивается. Если f = 50 Гц, то якорь совершает 100 колебаний в секунду, что приводит к повышенному механическому износу и возникновению шума.
Эффективными средствами снижения вибрации якоря являются уменьшение пульсации тягового усилия с помощью магнитных экранов (короткозамкнутых витков), охватывающих часть сечения сердечника, и использование многофазных ЭМ.
На рис. 15.5, в приведена конструкция части магнитопровода ЭМ с экраном и показаны направления магнитных потоков при убывании основного потока Ф. Тогда в соответствии с принципом Ленца поток Фк, создаваемый током, наведенным в экране (Э) правым потоком Фпр, будет направлен согласно с правым потоком Фпр, т. е. Ф2 = Фпр + Фк и Ф1 = Флев - Фк, где Ф1 Ф2 — суммарные потоки в воздушных зазорах.
Для того чтобы исключить вибрацию якоря, можно также использовать двух- или трехфазный электромагнит с токами в катушках, сдвинутыми по фазе.
Если с якорем сочленены инерционные механизмы, то он утяжеляется, что предотвращает вибрацию с частотой 2ω. Однако чувствительность ЭМ при этом снижается.
15.6. Поляризованные электромагниты
Принципиальное отличие поляризованных электромагнитов (ПЭМ) от нейтральных состоит в существовании зависимости между направлением перемещения якоря и полярностью управляющего напряжения Up , прикладываемого к рабочей обмотке. Эта зависимость достигается с помощью двух магнитных потоков: рабочего Фр, создаваемого постоянным напряжением, полярность которого может изменяться, и поляризующего Фп, образуемого постоянным магнитом или электромагнитом постоянного тока с неизменной полярностью питающего напряжения (рис. 15.6).
Повышенное быстродействие ПЭМ (несколько миллисекунд) по сравнению с нейтральными ЭМ достигается не только конструктивными приемами (шихтованным магнитопроводом, небольшими ходом и массой якоря, малой постоянной времени обмотки), но и связано непосредственно с его принципом действия: при срабатывании и отпускании поток в магнитопроводе не возникает и не исчезает, а перераспределяется или изменяет свое значение. Еще одна особенность ПЭМ, обусловленная наличием постоянного магнита, заключается в возможности принятия якорем различных фиксированных положений при обесточенной рабочей обмотке.
Различают три основные конструктивные схемы магнитопро-водов ПЭМ: последовательную, параллельную (дифференциальную) и мостовую.
Схема ПЭМ с последовательной магнитной цепью, в которой рабочий поток Фр, создаваемый током рабочей обмотки, и поляризующий поток Фп постоянного магнита замыкаются в общем простом неразветвленном магнитопроводе 1, показана на рис. 15.6, а вместе с его схемой замещения (в схеме замещения предполагается, что магнитная цепь не насыщена). При встречном действии потоков Фр и Фп якорь 2 оттянут пружиной 3. Изменение полярности рабочего напряжения вызывает притяжение якоря к сердечнику.
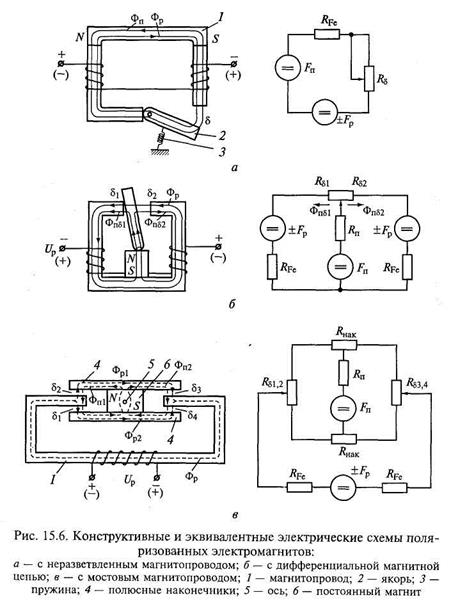
На рис. 15.6, 6 представлена одна из принципиальных схем ПЭМ с дифференциальной (параллельной) магнитной цепью и соответствующей схемой замещения. Здесь поляризующий поток Фп разветвляется на два потока Фпδ1 и Фпδ2, проходящих по сердечникам. Один из них при данной полярности рабочего напряжения действует с потоком Фр согласно, а другой — встречно.
Якорь притягивается к левому или правому полюсу в зависимости от того, в каком из зазоров δ1 или δ2 рабочий и поляризующий потоки суммируются. Тяговое усилие определяется разностью сил притяжения в зазорах δ1 и δ2 (откуда и название дифференциальный ПЭМ). При изменении полярности рабочего напряжения Up якорь перебрасывается к противоположному полюсу.
Одна из конструктивных схем ПЭМ с мостовым магнитопроводом и соответствующая схема замещения изображены на рис. 15.9, в. Рабочий поток Фр, проходящий по С-образному магнитопрово-ду 1, разветвляется на два потока Фр1 и Фр2, а поляризующий поток Фп постоянного магнита 6 — на два потока Фп1 и Фп2.
При данной полярности рабочего напряжения Up потоки Фп1 и Фр2 в зазоре δ1 и Фр1 и Фп2 в зазоре δ3 суммируются, а Фп1 и Фр1 в зазоре δ2 и Фп2 и Фр2 в δ4 вычитаются, вследствие чего постоянный магнит 6 с полюсными наконечниками 4 поворачивается на некоторый угол против хода часовой стрелки вокруг оси 5. Изменение полярности рабочего напряжения вызывает поворот магнита с полюсными наконечниками в обратном направлении.
Основные недостатки ПЭМ с последовательной магнитной цепью — это, во-первых, малая магнитная проницаемость магнито-твердого материала постоянного магнита, из-за чего снижается чувствительность ПЭМ и требуется повышенная МДС рабочей обмотки, а во-вторых, воздействие размагничивающей рабочей МДС на постоянный магнит, что неблагоприятно сказывается на стабильности намагниченности последнего и увеличивает размеры ПЭМ.
Глава 16