
Исполнительные электромагнитные устройства








15.1. Классификация электромагнитов
Электромагнит (ЭМ) является наиболее распространенным преобразователем электрического сигнала в механическое движение. ЭМ получили применение в качестве приводных или управляющих устройств в ряде механизмов, электрических аппаратов и реле, например в подъемных и тормозных устройствах, приводах для включения и выключения коммутационных аппаратов, электромагнитных контакторах, автоматических регуляторах, приводах для включения и отключения механических, пневматических, гидравлических цепей, а также для сцепления и расцепления вращающихся валов, открывания и закрывания клапанов, вентилей, заслонок, золотников на небольшое расстояние до нескольких миллиметров с усилием в несколько десятков ньютонов.
По назначению различают электромагниты:
удерживающие, которые служат для фиксации положения ферромагнитных тел (например, электромагниты, предназначенные для подъема предметов из ферромагнитного материала, электромагнитные плиты для фиксации деталей на металлообрабатывающих станках, электромагнитные станки). Эти ЭМ не совершают работы, от них требуется лишь определенная сила, на которую они рассчитываются;
приводные, которые служат для перемещений исполнительных устройств (например, клапанов, золотников, заслонок, железнодорожных стрелок), а также используются в контакторах, электромагнитных муфтах и др. Эти ЭМ совершают определенную работу и поэтому рассчитываются на определенную силу и перемещение;
специальные, которые используются в ускорителях элементарных частиц, медицинской аппаратуре и др.
По роду тока в обмотке различают ЭМ постоянного и переменного токов. ЭМ постоянного тока делят на нейтральные, не реагирующие на полярность управляющего сигнала, и поляризованные, реагирующие на полярность сигнала (когда на якорь действуют два независящих друг от друга потока).
По конструктивному исполнению различают следующие типы ЭМ.
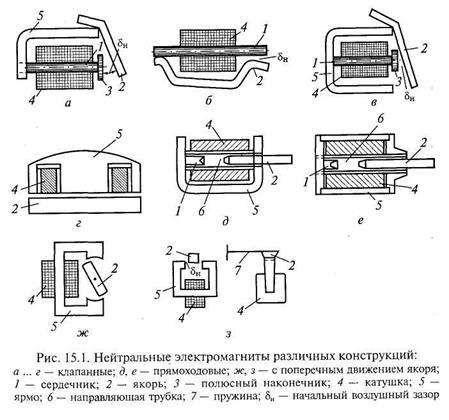
Клапанные — с внешним притягивающим якорем (рис. 15.1, а...г), при этом магнитные системы могут иметь различную форму:
П-образный магнитопровод и сердечник круглого сечения;
П-образнй магнитопровод и плоский якорь-ярмо;
Ш-образный магнитопровод и сердечник круглого сечения;
цилиндрический магнитопровод.
В клапанных ЭМ происходит небольшое перемещение якоря (несколько миллиметров), благодаря чему они развивают большие усилия и имеют высокую чувствительность.
Прямоходовые — с поступательным движением якоря. Используются они, как правило, в виде соленоидов и поэтому часто называются соленоидными ЭМ (рис. 15.1, д, е). Прямоходовые ЭМ имеют большой ход якоря, меньшие, чем клапанные, размеры и большее быстродействие, однако чувствительность у них меньше.
По своему назначению прямоходовые ЭМ выполняются в двух вариантах:
с неподвижным сердечником—«стопом» (см. рис. lo.l, о, е),
без сердечника со сквозным отверстием по оси катушки — так называемые длинноходовые электромагниты (см. рис. 15.1. е, показан пунктиром).
ЭМ с неподвижным сердечником создает большое усилие, значение которого возрастает по мере приближения якоря к сердечнику. Длинноходовые системы позволяют получить относительно большой ход якоря (до 200 мм) за счет удлинения катушки.
Эти ЭМ применяются в установках, работающих в режиме кратковременной нагрузки, т.е. когда ток, проходящий через катушку, имеет большое значение, но не вызывает ее перегрева.
С поперечным движением — якорь движется в поперечном направлении к средней линии между полюсами. Практическое использование получили следующие формы магнитных систем:
с выступающим якорем (рис. 15.1, ж) — применяется при углах поворота якоря 25...40°;
с вытягивающимся якорем (рис. 15.1, з) — применяют при углах поворота якоря 10... 15 °. Позволяют получить тяговую характеристику любой формы (возрастающую, спадающую с любым углом наклона), что обеспечивается соответствующим выбора профиля якоря.
В этих системах якорь подвешивается на пружине, а рабочий угол поворота якоря выбирается таким, чтобы он не занимал крайних положений против полюсов.
Рассмотренные системы с движущимся в поперечном направлении якорем применяются в автоматических регуляторах, когда требуется получить большое значение коэффициента возврата. Кроме того, их удобно использовать в устройствах, работающих на постоянном токе (при переменном токе могут возникнуть вибрации якоря, в то время как зазор между полюсами и якорем должен быть постоянным).
ЭМ состоит из магнитопровода и собственно катушки.
Магнитопровод. В ЭМ постоянного тока магнитопровод выполняется сплошным из полосового или круглого материала — технически чистого железа марок Э, ЭА и ЭАА. Высокочувствительные электромагниты имеют магнитопровод из железоникелевых и железоникелькобальтовых сплавов, это пермаллои марок 79НМ, 79НМА и гайперники марок 50НП, 45Н, 45НП. Широкое применение в магнитопроводах быстродействующих ЭМ нашли легированные кремнием стали марок Э11, Э21 и т.д. Легирование электротехнических сталей кремнием обусловливает значительное повышение электросопротивления. При этом уменьшаются потери энергии на вихревые токи, что позволяет применять сталь в более мощных устройствах, работающих на переменном токе.
Магнитопроводы ЭМ переменного тока выполняют шихтованными, т. е. собирают из пластин, штампуемых из листового материала толщиной 0,3...0,5 мм. Материалами могут быть: горяче- и холоднокатаная электротехническая сталь марок Э11... Э43, Э1100, Э310 и др.
В некоторых случаях магнитопроводы ЭМ постоянного тока также делают шихтованными для устранения вихревых токов, возникающих в процессе включения и выключения. Иногда в целях экономии небольшие ЭМ переменного тока изготовляют из сплошного материала толщиной 2...3 мм.
Катушка. По своей конструкции катушки бывают каркасными и бескаркасными, а по форме — круглого и прямоугольного сечения. Каркасная катушка состоит из каркаса и обмотки. На одном каркасе может быть несколько обмоток, уложенных рядами. Бескаркасная катушка проще каркасной. Отсутствие каркаса позволяет полностью использовать намоточное окно.
15.2. Порядок расчета нейтрального электромагнита
В задачу расчета входит нахождение таких конструктивных размеров и параметров обмотки ЭМ, которые соответствовали бы заданным условиям работы устройства. Обычно в число исходных данных входят: противодействующая (механическая) характеристика, полученная расчетным или экспериментальным путем; напряжение и ток входного сигнала, подаваемого на обмотку; режим работы; временные параметры; габаритные размеры; вес; стоимость. Кроме того, необходимо учитывать основные условия эксплуатации: температуру окружающей среды, влажность, запыленность, наличие вибраций.
В результате расчета необходимо выбрать тип ЭМ (см. рис. 15.1), материал для магнитной цепи, определить геометрические размеры магнитопровода, катушки и ее электрические параметры. Создаваемая конструкция должна отвечать критерию оптимальности, или экономичности, т.е. обладать минимальными размерами, весом и стоимостью.
Расчет ЭМ включает в себя следующие этапы. 1. Выбор типа электромагнита и кинематической схемы соединения его с исполнительным механизмом. Форма магнитной цепи определяется назначением ЭМ в технологической цепи производства. Например, для больших усилий и больших ходов якоря рекомендуется использовать прямоходовые ЭМ (см. рис. 15.1, е), которые имеют минимальные размеры, вес и стоимость. При очень малом ходе якоря применяют клапанные электромагниты с цилиндрическим магнитопроводом (см. рис. 15.1, г).
Для каждой формы ЭМ имеются определенные соотношения между значениями электромагнитного усилия и ходом якоря, при которых вес сконструированного электромагнита получается минимальным. Для удобства выбора оптимальной формы ЭМ вводится понятие конструктивного показателя (КП), представляющего собой следующее отношение:
где F э min — электромагнитное усилие, которое должен развивать электромагнит при максимальном рабочем воздушном зазоре θВ, когда θВ = θН.
Выбор КП определяется на основании следующих рассуждений: длина сердечника растет пропорционально увеличению магнитодвижущей силы, создаваемой обмоткой, а МДС, в свою очередь, определяется максимальным рабочим воздушным зазором δВ; поперечное сечение сердечника определяется требуемым начальным электромагнитным усилием. Действительно, как было показано выше, электромагнитное усилие пропорционально сечению сердечника, т. е. квадрату его поперечного линейного размера. Поэтому поперечный размер сердечника пропорционален корню квадратному из тягового усилия.
На основании расчета были получены данные для выбора оптимальной формы ЭМ. Так, для прямоходового ЭМ без неподвижного сердечника (см. рис. 15.1, е) значение конструктивного показателя составляет 400 Н1/2/м; для клапанного ЭМ с цилиндрическим магнитопроводом (см. рис. 15.1, г) конструктивный показатель равен 2900 Н1/2/м. В маломощных ЭМ практическое значение имеет не вес, а чувствительность, поэтому эти ЭМ выполняются клапанного типа (см. рис. 15.1, а...г). Конструктивный показатель для них равен 800... 8000 Н1/2/м.
2. Предварительный расчет электромагнита проводят обычно в два этапа. Сначала выполняют ориентировочный расчет для определения в первом приближении основных размеров и параметров ЭМ. При таком расчете потери намагничивающей силы и утечки магнитного потока учитывают приближенно. Затем проводят точный расчет электромагнита, при этом найденные в предварительном расчете размеры магнитопровода позволяют с достаточной точностью учесть насыщение магнитопровода, потери магнитодвижущей силы и утечку магнитного потока. После проведения окончательного расчета проверяют рациональность принятой формы и найденных размеров ЭМ.
Порядок предварительного расчета применительно к прямоходовому ЭМ с неподвижным сердечником и клапанному ЭМ сводится к следующему:
выбирают значение магнитной индукции в рабочем зазоре при начальном его значении BδH . Следует иметь в виду, что с ростом индукции уменьшаются размеры магнитопровода, но одновременно уменьшается и чувствительность ЭМ, так как возрастают потери магнитодвижущей силы и утечка магнитного потока. Учитывая наличие потоков рассеяния, магнитную индукцию Bδн выбирают в пределах 0,06... 1 Тл в зависимости от формы магнитопровода и условий работы ЭМ. Выбор Вδн определяется соотношением между заданным значением электромагнитного усилия F э при отпущенном якоре и ходом δ; причем с увеличением F э необходимо выбирать большие значения Вδн. Опытные и расчетные данные оптимальных значений Bδн удобно выражать в функции конструктивного показателя КП. На рис. 15.2 приведены зависимости величины BδH и отношения длины обмотки lоб к ее ширине hоб от отношения √F э min /δН для некоторых типов ЭМ постоянного тока. Эти зависимости построены исходя из наиболее экономичного использования активных материалов (сталь, медь);
определяют сечение участков магнитопровода. Например, для клапанного ЭМ или прямоходового с плоским якорем сечение рабочего зазора можно найти, воспользовавшись формулой

Причем требуемое значение электромагнитного усилия F э min принимают на 15...25 % больше заданного противодействующего усилия при δ = δН. Для электромагнитов, не имеющих полюсного наконечника, найденное сечение рабочего зазора Sδ соответствует сечению сердечника. При наличии полюсного наконечника, например в клапанных ЭМ (см. рис. 15.1, а, в), найденное сечение равно сечению полюсного наконечника.
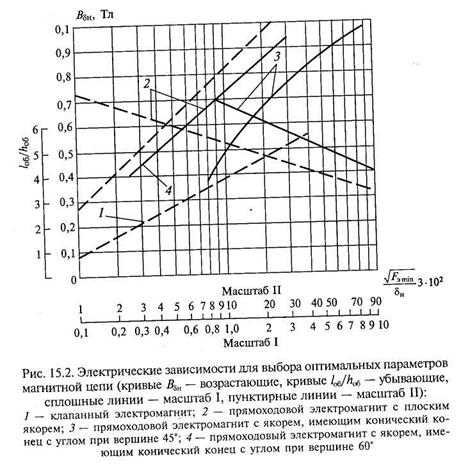
3. Определение длины lоб и толщины hоб обмотки. Предварительно задаются отношением длины обмотки к ее толщине, т.е. lоб/hоб. При изменении этого отношения получается разный расход меди и стали — активных материалов электромагнита. Так, с увеличением отношения lоб/ hоб уменьшается расход меди (так как уменьшается объем меди, поверхность охлаждения катушки увеличивается), а расход стали растет (так как увеличивается длина магнитопровода). На практике установлено, что при относительно небольшом ходе якоря и малом значении усилия отношение lоб/hоб следует выбирать большим, чем при увеличении усилия и уменьшении хода якоря.
Таким образом, с помощью отношения lоб/hоб также можно определить значения конструктивного показателя (см. рис. 15.2). Рекомендуется для клапанных ЭМ брать отношение lоб/ hоб = 1... 8, а для прямоходовых — в пределах 5... 8.
15.3. Тяговая и механическая характеристики электромагнита
В соответствии со вторым законом Кирхгофа в любое мгновение переходного процесса при включении ЭМ выполняется следующее соотношение
где U — напряжение, подаваемое на зажимы обмотки (катушки) с числом витков w и активным сопротивлением R .
Умножив обе части этой формулы на Idt , получим уравнение энергетического баланса
где UIdt — электрическая энергия, поступившая в обмотку за время dt ; I 2 dt — тепловые потери в активном сопротивлении; wIdФ — энергия, затраченная на создание магнитного поля ЭМ и механическую работу движения якоря.
После интегрирования приходим к выражению
где t , Ф — текущие координаты.
Известно, что ток в обмотке ЭМ, включенной на постоянное напряжение, нарастает по экспоненциальному закону. В некоторый момент времени он достигает значения тока трогания, которому соответствует точка 1 на рис. 15.3. В это мгновение якорь приходит в движение, в процессе которого рабочий зазор уменьшается, индуктивность обмотки растет и ток в ней падает до тех пор, пока якорь не притянется к сердечнику, чему соответствует точка 3. Во время движения якоря связь между Ф и wl определяется кривой 1 — 2—3. По окончании движения якоря ток опять начинает возрастать, достигая установившегося значения в точке 4.
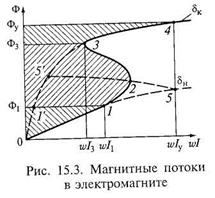
Если якорь при срабатывании ЭМ находится в начальном положении и рабочий зазор δ максимален (δ = δН), то характеристика намагничивания при δ = δН = const имеет вид кривой 0 — 1 — 5 (см. кривую δН на рис. 15.3), а в конечном положении якоря, когда он полностью притянут и δ = δК = const — вид кривой 0— 1—3—4 (см. кривую δК на рис. 15.3). Значит, динамическая характеристика намагничивания Ф( wI ) при срабатывании ЭМ состоит из участка 0 — 7 кривой δН, переходной кривой 1 — 2—3 во время движения якоря (δ = var) и участка 3—4 кривой δК.
Энергия W01234, представленная в последней формуле вторым членом ее правой части и равная энергии, поступившей из сети, в течение нарастания МДС от 0 до wIy при срабатывании ЭМ за вычетом тепловых потерь, пропорциональна площади, ограниченной кривой 0 — 7 — 2—3—4—Фу— 0.
Тяговой (или электромеханической) характеристикой ЭМ называют зависимость QT (δ) — тягового усилия от длины воздушного зазора при известном характере изменений тока обмотки и противодействующих усилий во время срабатывания.
Допустим, при подаче на обмотку напряжения трогания Uтр движение якоря ЭМ начинается по достижении током значения Iу и в процессе изменения длины зазора от начальной δН до конечной δК этот ток остается неизмененным. Для ЭМ последовательного включения это условие естественное. В ЭМ параллельного включения ток в обмотке неизменный, если в любое мгновение срабатывания тяговое и противодействующее усилия равны друг другу, т. е. якорь перемещается бесконечно медленно, и, следовательно, инерция подвижных частей не проявляется. Поэтому снятая при таких условиях тяговая характеристика является статической. Другими словами, статическая тяговая характеристика — это зависимость электромагнитного усилия, действующего на неподвижный якорь, от его положения, исчисляемого значением рабочего зазора, при неизменной МДС.
Под механической, или противодействующей, характеристикой ЭМ понимают зависимость QMex(δ) — результирующей силы сопротивления движению якоря, приложенной к нему и приведенной к рабочему зазору 5, от длины последнего (или момента сопротивления от угла поворота якоря).
Множество различных механических характеристик объясняется многообразием конструктивного исполнения и параметров механических элементов ЭМ.
Построение механических характеристик ЭМ и согласование их с тяговыми характеристиками производятся так же, как для реле.
15.4. Динамика электромагнита
Под инерционностью ЭМ понимают запаздывание перемещения якоря по сравнению с изменениями входного напряжения. Она определяется отставанием изменения тока в обмотке от изменения приложенного к ней напряжения и механической инерцией якоря и связанных с ним подвижных частей.