
Электромагнитные реле переменного тока








В тех случаях, когда основным источником энергии является сеть переменного тока, желательно применять реле, обмотки которых питаются переменным током. При подаче в обмотку реле переменного тока якорь будет притягиваться к сердечнику так же, как и при постоянном токе под действием электромагнитной силы F 3 , пропорциональной магнитному потоку Фδ, возникающему в зазоре между якорем и сердечником и создаваемому при протекании тока в обмотке электромагнита:
Так как ток в обмотке электромагнита переменный, то и магнитный поток Фδ, создаваемый этим током в рабочем зазоре, будет также переменным, т. е.

После преобразований получим

или

где μ0 — магнитная постоянная.
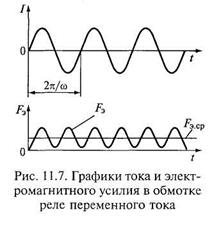
Изменение тока I в обмотке и соответствующее изменение электромагнитного усилия во времени изображены на рис. 11.7.
Якорь будет притягиваться к сердечнику под действием среднего значения электромагнитного усилия, т. е. его постоянной составляющей F э. cp. Величина F э. cp определяется путем тригонометрического преобразования формулы (11.1):

где постоянная составляющая электромагнитного усилия

а переменная составляющая

Из формулы (11.2) следует, что электромагнитное усилие меняется (пульсирует) с удвоенной частотой 2ω, обращаясь в нуль дважды за период питающего (входного) напряжения. Следовательно, якорь реле может вибрировать, периодически оттягиваться от сердечника возвратной пружиной, что вызывает износ его оси, обгорание контактов, прерывание электрической цепи и другие нежелательные явления.
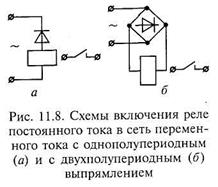
Хотя переменный ток является более распространенным, чем постоянный, реле постоянного тока нашли большее применение, так как они требуют использования шихтованного магнитопровода (набранного из отдельных листов), а также специальных мер для устранения вибрации якоря. Возможно включение реле постоянного тока в сеть переменного тока через выпрямительные устройства. На рис. 11.8 изображены схемы подобных устройств.
Рассмотрим способы устранения вибрации якоря реле переменного тока.
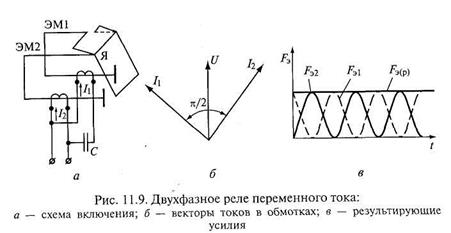
Применение двухфазного реле. На рис. 11.9, а изображена схема двухфазного реле переменного тока, имеющего две обмотки, расположенные на двух сердечниках ЭМ1 и ЭМ2 с общим якорем. Обмотки реле соединены параллельно друг другу. В цепь одной из обмоток включен конденсатор C, благодаря чему токи I 1 и I2 в обмотках реле оказываются сдвинутыми по фазе на угол π/2 (рис. 11.9, б). Так как токи в обмотках проходят через нуль в разные моменты времени, то результирующее тяговое усилие F э( p ) , действующее на якорь, никогда не обращается в нуль и имеет постоянное значение, т.е. не содержит переменной составляющей (рис. 11.9, в).
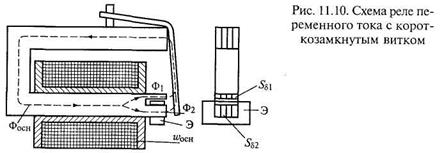
Применение короткозамкнутого витка (экрана), охватывающего часть конца сердечника (расщепленный сердечник), является наиболее эффективным способом устранения вибрации якоря реле.
На рис. 11.10 изображена схема реле переменного тока с короткозамкнутым витком (контакты реле и выводы обмотки на схеме не показаны). Конец сердечника, обращенный к якорю, расщеплен на две части, на одну из которых надета короткозамкнутая обмотка — экран Э (один или несколько витков).
Принцип работы реле заключается в следующем. Переменный магнитный поток Фосн основной обмотки wосн, проходя через разрезанную часть сердечника, делится на две части. Часть потока Ф2 проходит через экранированную половину полюса сечением Sδ2, в которой размещается короткозамкнутая обмотка (экран), а другая часть потока Ф1 проходит через неэкранированную половину полюса сечением Sδ1 . Поток Ф2 наводит в короткозамкнутом витке ЭДС екз, которая создает ток /кз. При этом возникает еще один магнитный поток Фкз, который воздействует на магнитный поток Ф2 и вызывает его отставание относительно потока Ф1 по фазе на угол φ = 60... 80°. Благодаря этому результирующее тяговое усилие F э никогда не доходит до нуля, так как потоки проходят через нуль в разные моменты времени.
11.2. Поляризованные электромагнитные реле
В отличие от рассмотренных ранее нейтральных электромагнитных реле, у поляризованного реле направление электромагнитного усилия зависит от полярности сигнала постоянного тока в обмотке. Поляризация этих реле осуществляется при помощи постоянного магнита.
Существует много конструктивных разновидностей поляризованных реле, которые классифицируются по ряду признаков. По конструктивной схеме магнитной цепи различают реле с последовательной, параллельной (дифференциальной) и мостовой магнитными цепями, по числу обмоток управления — одно и многообмоточные, по способу настройки контактов (числу устойчивых положений якоря) — двух- и трехпозиционные.
Поляризованные реле могут быть использованы также в качестве вибропреобразователей, но наибольшее распространение они получили в маломощной автоматике, особенно в следящих системах при управлении реверсивными двигателями.
К числу достоинств поляризованных реле относятся: высокая чувствительность, которая характеризуется малой мощностью срабатывания и составляет 10-5 Вт; большой коэффициент управления; малое время срабатывания (единицы миллисекунд).
Недостатки по сравнению с нейтральными электромагнитными реле следующие: несколько сложнее конструкция; большие габаритные размеры, вес и стоимость.
В поляризованных реле используют дифференциальные и мостовые схемы магнитных цепей, которые имеют много разновидностей (название цепей определяется типом электрической схемы замещения электромагнитной системы). На рис. 11.11 изображено поляризованное реле с дифференциальной схемой магнитной цепи.
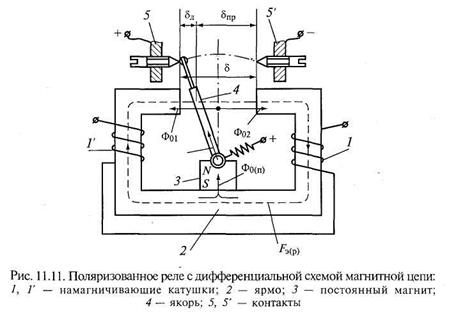
На якорь реле действует два независимых друг от друга потока: поток Ф0(п), создаваемый постоянным магнитом 3 и не зависящий от рабочего состояния схемы, в которую включено реле, и рабочий (управляющий) поток Фэ(р), создаваемый намагничивающими катушками 1 и 1’ и зависящий от тока, протекающего по их обмоткам.
Электромагнитное усилие, действующее на якорь 4, зависит, таким образом, от суммарного действия потоков Фэ(р) и Ф0(п). Изменение направления электромагнитного усилия при изменении полярности тока в рабочей обмотке происходит вследствие того, что изменяется направление рабочего потока относительно поляризующего.
Поляризующий поток Ф0(п) проходит по якорю и разветвляется на две части — Ф01 и Ф02 в соответствии с проводимостями воздушных зазоров слева δЛ и справа δпр от якоря. В зависимости от полярности управляющего сигнала рабочий поток Фэ(р) вычитается из потока Ф01 в зазоре слева от якоря и прибавляется к потоку Ф02 справа от якоря (как показано на рис. 11.11), или наоборот. В случае, показанном на рисунке, якорь перекинется из левого положения в правое. При выключении сигнала якорь будет находиться в том положении, которое он занимал до выключения сигнала. Таким образом, результирующее электромагнитное усилие, действующее на якорь, будет направлено в строну того зазора, где магнитные потоки суммируются.
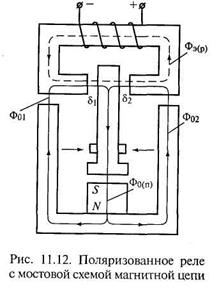
В поляризованном реле с мостовой схемой магнитной цепи (рис. 11.12) силы притяжения якоря, включенного в одну из диагоналей этой схемы, действуют так же, как и в дифференциальной схеме, т.е. в воздушном зазоре с одной стороны якоря рабочий поток Фэ(р) направлен согласно с поляризующим потоком Ф0(П), а с другой — встречно. Мостовые схемы поляризованных реле имеют более высокую стабильность параметров и устойчивость к внешним механическим воздействиям.
Поляризованные реле выпускаются трех видов настройки. Реле, изображенное на рис. 11.11, является двухпозиционным. Если неподвижные контакты 5 и 5' симметрично расположены относительно нейтральной линии (якорь отрегулирован симметрично), то при выключении управляющего сигнала якорь реле остается в том же положении, которое он занимал при наличии управляющего сигнала. Повторное включение управляющего сигнала прежней полярности не вызовет изменения положения якоря. Если изменить полярность управляющего сигнала, то якорь перебросится в другое положение и останется в нем после снятия сигнала. Такая настройка называется нейтральной или двухпозиционной.
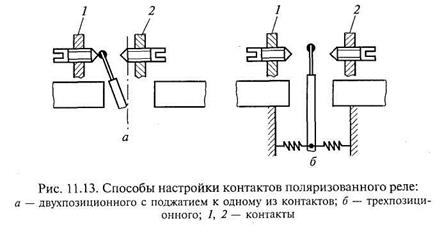
Если (рис. 11.13, а) один из контактов 1 или 2 выдвинут за нейтральную линию, то реле является двухпозиционным с преобладанием к одному из контактов. В этом случае при выключенном реле якорь всегда прижат к левому контакту 1 (к правому контакту 2, если за нейтральную линию выдвинут левый контакт) и перебрасывается вправо лишь на время протекания в управляющей обмотке тока соответствующей полярности.
Трехпозиционное реле имеет симметрично расположенные от нейтральной линии неподвижные контакты (рис. 11.13, б). Якорь при отсутствии управляющего сигнала удерживается в среднем положении с помощью специальных пружин, расположенных с двух сторон, или закрепляется на плоской пружине, упругость которой создает устойчивое положение равновесия в среднем положении. При подаче сигнала в управляющую обмотку контакт на якоре замыкается с левым или правым контактом (в зависимости от полярности сигнала) и возвращается в нейтральное положение после снятия сигнала.
Поляризованные реле находят широкое применение в схемах автоматики благодаря своим характерным особенностям. Наличие нескольких обмоток позволяет использовать их в качестве логических элементов, небольшая мощность срабатывания — в качестве элементов контроля небольших электрических сигналов, малое время срабатывания и чувствительность к полярности входных сигналов — в качестве амплитудных модуляторов и демодуляторов. Благодаря высокой чувствительности поляризованные реле часто используют в маломощных цепях переменного тока с включением через выпрямитель.
11.3. Контакты реле. Средства дуго- и искрогашения
Контакты, являясь важнейшим элементом реле, определяют надежность и срок их службы. По характеру работы контакты подразделяются на замыкающие (при отсутствии сигнала в обмотке реле они разомкнуты, а при наличии тока в управляющей обмотке они замыкаются) и размыкающие (при отсутствии сигнала они замкнуты и размыкаются при наличии сигнала в обмотке реле). В процессе работы реле контакты могут находиться в следующих состояниях: замкнутом, в процессе размыкания, разомкнутом и в процессе замыкания.
К тяжелым условиям работы контактов, при которых происходит наибольший износ, относятся их замкнутое состояние, когда через контакты течет весь ток нагрузки, и процесс размыкания, когда между контактами возникает дуга.
По мере увеличения усилия FK , действующего на контакты, увеличивается площадь их соприкосновения, а переходное сопротивление уменьшается. При наличии на поверхности контактов окисной пленки необходимо, чтобы механическое давление в точках контакта было достаточным для ее разрушения.
Зависимость переходного сопротивления от контактного давления следующая:

где а — коэффициент, зависящий от свойств контактного материала и шероховатости контактной поверхности; Fk — контактное усилие; b — коэффициент, характеризующий форму контактов.
Контакты по форме контактирующих поверхностей и в зависимости от тока, на который они рассчитаны, делят на три основные группы (рис. 11.14):
точечные — конус и плоскость или полусфера и плоскость (теоретически с соприкосновением в одной точке), рассчитаны на небольшие токи;
плоскостные — плоскость и плоскость, рассчитаны на средние токи;
линейные — с соприкосновением по линии, рассчитаны на большие токи.
В реле малой и средней мощностей наибольшее распространение имеет точечный контакт, как обеспечивающий надежное электрическое соединение при небольшом контактном давлении. Контакты при этом закрепляются на упругих плоских пружинах. Существуют контакты специальных типов: вакуумные и ртутные.

К материалам, из которых изготовляются контакты, предъявляются особые требования: они должны быть механически прочными, твердыми, иметь высокие значения температуры плавления, обладать хорошей тепло- и электропроводностью, легко обрабатываться, быть устойчивыми против коррозии и эрозии, а также дешевыми.
На практике при выборе материала контактов пользуются следующими соображениями:
малые давления — 0,01... 0,03 Н (высокочувствительные реле) — платина;
давления от 0,05 до 1 Н (при малой частоте срабатывания) — серебро;
давления от 0,3 до 1 Н (при большей частоте срабатывания) — металлокерамические материалы;
давление свыше 1 Н (большая частота срабатывания) — вольфрам.
Основной причиной разрушения контактов, определяющей срок их службы, является дуговой разряд, возникающий при их размыкании. Причиной интенсивного разряда является наличие в управляемой цепи реактивного сопротивления. Если оно имеет емкостный характер, то интенсивное искрение наблюдается при замыкании контактов. Если же управляемая цепь содержит значительную индуктивность, то особенно сильный и затяжной разряд возникает при разрыве этой цепи из-за образующегося перенапряжения на контактах. В большинстве случаев управляемая цепь содержит индуктивность.
Применяются два основных метода искро- и дугогашения: шунтирование индуктивности разрываемой цепи и шунтирование контактов. В обоих случаях, пока контакты замкнуты, в магнитном поле индуктивности накапливается энергия, которая при размыкании контактов расходуется не в дуге, а в шунтирующем устройстве. Методы искрогашения сводятся к созданию замедленного исчезновения тока.
На рис. 11.15 изображены основные схемы искрогашения. В схеме, представленной рис. 11.15, а, применяется метод шунтирования индуктивной нагрузки последовательным включением емкости с сопротивлением Rm . В момент размыкания контактов в контуре, образованном нагрузкой и шунтом, под действием энергии, запасенной в магнитном поле, возникает ток переходного процесса, который протекает еще некоторое время после размыкания контактов, предотвращая тем самым наведение высоких значений ЭДС самоиндукции.
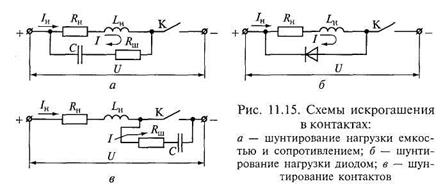
Энергия магнитного поля переходит в теплоту, которая выделяется на сопротивлении шунта Rm . Наличие конденсатора в схеме исключает прохождение тока нагрузки при замкнутых контактах, и, следовательно, исключаются потери энергии в сопротивлении шунта.
Для того чтобы в контуре LH - RH - С - Rш не возникли автоколебания тока, емкость выбирают из условия RH + Rm > 2√ LH / C .
В схеме на рис. 1.15, б диод производит аналогичное действие, т. е. шунтирует индуктивную нагрузку и пропускает ток переходного процесса I, который создает ЭДС самоиндукции в момент разрыва управляемой цепи. При замкнутых контактах диод заперт напряжением сети и не пропускает ток нагрузки.
На рис. 11.15, в изображена схема шунтирования контактов емкостью с сопротивлением. Здесь емкость исключает протекание тока нагрузки в шунтирующей цепи при разомкнутых контактах. Кроме того, устраняется расход энергии как в цепи нагрузки, так и в шунтирующем сопротивлении, поскольку конденсатор не пропускает постоянный ток.
Цепочка R ш — С создает путь мимо контактов для убывающего после их разрыва тока нагрузки и для рассеяния энергии, запасенной в магнитном поле цепи нагрузки. После размыкания контактов ток по мере заряда конденсатора от нуля до напряжения питания U постепенно уменьшается до нуля (т.е. резкого увеличения напряжения на контактах не возникает). Напряжение на контактах, как и на емкости, постепенно увеличивается до значения U . Ток в этом случае проходит мимо контактов через цепочку R ш — С и дуговой разряд не возникает. Так как на практике емкость конденсатора выбирают в пределах 0,5... 2 мкФ, то зарядка конденсатора будет происходить медленно и, следовательно, напряжение на контактах будет также нарастать достаточно медленно.
11.4. Реле времени
Реле времени создает регулируемую выдержку времени от момента подачи сигнала на срабатывание до момента замыкания (или размыкания) контактов. Программное реле — это разновидность реле времени с несколькими контактами, имеющими различные регулируемые, как правило, независимые друг от друга выдержки времени. Например, существуют реле счета импульсов, контакты которых замыкаются после отсчета заранее заданного числа импульсов, подаваемых на катушку управления. Устройство таких реле имеет много общего с шаговыми искателями.
Для создания выдержки времени применяются электрический разрядный RC - контур, электромагнитные реле с короткозамкнутыми гильзами, механические механизмы (анкерный и планетарный), пневматические и др.
На рис. 11.16 дана схема реле времени с пъезокерамическим элементом. Пьезокерамические материалы, полученные, например, на основе титаната бария, обладают свойством изменять свои линейные размеры в электрическом поле. Пьезокерамический биморфный элемент (БЭ) состоит из двух прочно склеенных пластинок, на наружных поверхностях которых, а также в месте их соединения размещены металлические обкладки. Верхний слой элемента в электрическом поле удлиняется, нижний — укорачивается. В результате этот элемент, консольно закрепленный на одном конце, изгибается, что приводит к замыканию контакта К1. При снятии электрического поля с обкладок деформация биморфного элемента исчезает, контакт К1 размыкается, а контакт К2 замыкается.
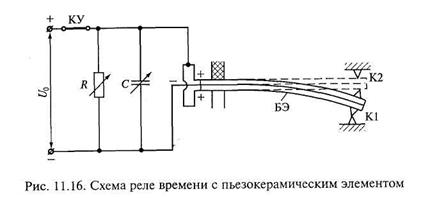
При замкнутой кнопке управления (КУ) конденсатор С и обкладки БЭ заряжены до напряжения U 0 и сам БЭ деформирован. При отключении КУ начинается разряд конденсатора С на резистор R . Напряжение на обкладках БЭ постепенно снижается, и его механическая деформация также постепенно исчезает.
Процесс разряда конденсатора описывается уравнением

Решение этого уравнения при начальном условии t = 0 и I = I0 имеет вид

Изменение напряжения на конденсаторе в обкладках БЭ описывается аналогичной зависимостью

Допустим, что реле срабатывает и его контакт К2 замыкается, когда напряжение снизится до значения Ucpa 6 . Тогда время срабатывания

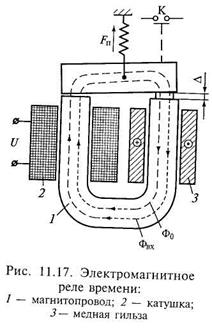
Реле времени с электромагнитным замедлением (электромагнитное реле времени) основано на использовании вихревых токов для замедления срабатывания электромагнитной системы. На магнитопровод 1 (рис. 11.17) надета металлическая (обычно медная) гильза (или шайба) 3, равнозначная короткозамкнутой обмотке с одним витком. Когда изменяется основной поток Фо, созданный током катушки 2, в гильзе 3 наводятся вихревые токи, поток Фвх от которых имеет направление, препятствующее изменению основного потока в соответствии с принципом инерции Ленца. Когда поток Фо нарастает, поток Фвх имеет противоположное направление, а когда Фо снижается — направление Фвх совпадает с Фо.
Широко распространены реле времени с механическим замедлением, в частности с часовым механизмом. В таких реле (рис. 11.18) при подаче напряжения на электромагнитный привод 1 растягивается пружина 2 и часовой механизм приходит в действие. Анкер 4, поворачиваясь вокруг оси О2, «перепускает» зубчатый диск 3, который вращается вокруг оси О1. Перемещающийся вместе с ним рычаг 8 в конце пути упирается в пластинчатый контакт 9 и замыкает его. Храповой механизм дает подвижной системе реле возможность возвратиться в исходное положение, когда будет снято напряжение электромагнитного привода 1. Возврат осуществляется специальной пружиной (на рисунке не показана). Изменяя расстояние от грузика 5 до оси О2 и массу грузика, можно регулировать момент инерции анкера и через него — выдержку времени реле.

Выдержка времени, создаваемая реле с часовым механизмом,

где α — угол поворота подвижной системы от начала движения до замыкания контактов; n — передаточное число зубчатого механизма; z — число зубьев ходового колеса; Tа — период колебаний анкера,

здесь J — момент инерции анкера; φ — угол поворота анкера при колебаниях; Мдв — момент, создаваемый движущимися силами; Mпрд — момент, создаваемый противодействующими силами.
В некоторых реле применяется пневматическое или гидравлическое замедление. Изменением сечения отверстия, через которое проникает воздух (или жидкость) из одного объема в другой, достигается регулировка выдержки времени. Наиболее высокие выдержки времени (до несколько часов) достигаются в реле с планетарным механизмами.
11.5. Тепловые реле
Измерительным органом теплового реле является биметаллический элемент, который при нагреве изгибается и переводит контактную систему в отключенное или включенное состояние. Биметаллический элемент представляет собой двухслойную пластинку из металлов с разными температурными коэффициентами линейного расширения (ТКЛР). При нагреве слой термоактивного металла существенно расширяется, в то время как слой термоинертного металла почти не деформируется. Если один конец биметаллической пластинки жестко закрепить, то другой свободный конец ее будет изгибаться.
Пластинки биметаллического элемента, прочно соединенные между собой, должны иметь возможно большую разность ТКЛР, что будет увеличивать чувствительность теплового реле. Пределы упругости компонентов биметалла должны быть высокими. В этом случае для них допустима большая температура нагрева, не вызывающая остаточных деформаций.
В качестве материала с низким ТКЛР (термоинертного компонента) часто применяется сплав никеля с железом, называемый инваром. Инвар 36Н содержит 36 % никеля, инвар 39Н — 39 %. В качестве термоактивного компонента с высоким ТКЛР используются различные стали, латунь, константан и другие материалы.
На рис. 11.19 изображена конструктивная схема теплового реле. Биметаллическая пластина / такого реле упирается в верхний конец пружины 7. Нижний конец пружины давит на выступ пластмассовой колодки 4, которая может поворачиваться вокруг оси О1.
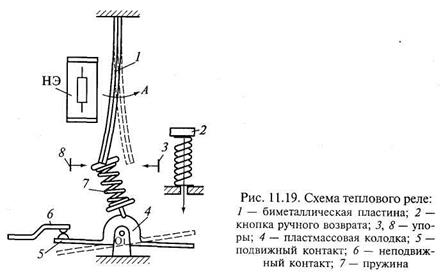
В положении, изображенном на рис. 11.19, движение пластины 1 и верхнего конца пружины /влево ограничено упором 8. Сила пружины 7 воздействует на выступ пластмассовой колодки 4 так, что она оказывается повернутой по часовой стрелке, а укрепленный на ней подвижный контакт 5 — замкнутым с неподвижным контактом 6.
При протекании повышенного тока по нагревательному элементу — НЭ (или непосредственно по пластине 1) — биметаллическая пластина 1 нагревается и ее нижний конец перемещается в направлении стрелки А. В результате верхний конец пружины 7переходит вправо и создаваемая ею сила воздействует на колодку 4 так, что она поворачивается на некоторый угол против часовой стрелки, а контакты 5 и 6 размыкаются. Упоры 3 и 8 ограничивают перемещение нижнего конца пластины 1. Возврат реле в исходное положение происходит самопроизвольно, когда биметаллическая пластинка остынет. В других конструкциях перевод реле в исходное положение осуществляется кнопкой ручного возврата 2.
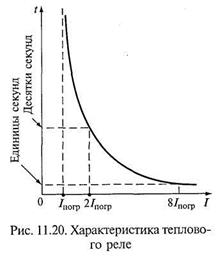
На рис. 11.20 дана типичная для тепловых реле зависимость времени срабатывания t от тока I. При минимальном (пограничном) токе срабатывания Iпогр время срабатывания велико, с увеличением тока оно уменьшается.
Глава 12
ЭЛЕМЕНТЫ КОНТАКТОРНОГО УПРАВЛЕНИЯ И ЗАЩИТЫ
12.1. Общие сведения
Основным аппаратом, производящим замыкание и размыкание главных цепей двигателя при автоматическом управлении, является электромагнитный контактор, представляющий собой выключатель, включаемый и выключаемый при помощи электромагнита. Контакторы обычно применяют одновременно с различными реле, например реле тока, напряжения и др. Контакты реле включают в цепь электромагнитов, что дает возможность производить включение и выключение силовых цепей с током от 10 до нескольких сотен ампер и напряжением до нескольких сотен вольт. Контакторы выполняют как для постоянного, так и для переменного тока, и они могут быть одно- и многополюсными. Контакторы постоянного тока имеют обмотку, питающуюся постоянным током напряжением ПО или 220 В и потребляют мощность 20... 30 Вт. Обмотки контакторов переменного тока питаются переменным напряжением 127, 220 или 380 В и служат для коммутации цепей переменного тока.
Для автоматического пуска и остановки двигателей применяют магнитные пускатели.
12.2. Электромагнитные контакторы
На рис. 12.1 схематически изображен однополюсный контактор; он состоит из стального сердечника 1, на который надета катушка 2.
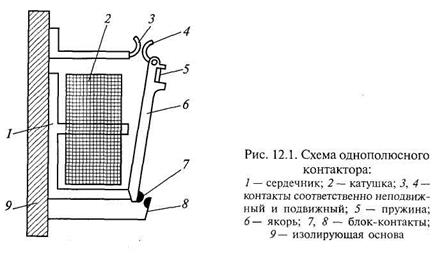
При включении тока в катушке якорь 6 притягивается к сердечнику и замыкает главные линейные притирающиеся контакты: 3 — неподвижный и 4 — подвижный. Пружина 5 обеспечивает надежность прикосновения контактов. Вспомогательные блок-контакты 7и Услужат для цепей обмоток других контакторов, реле и цепей сигнализации. Число вспомогательных контактов может быть различно, причем они могут быть размыкающими или замыкающими.
При выключении катушки якорь под действием собственного веса (при вертикальном расположении контактора) отпадает и выключает цепь тока; одновременно размыкаются контакты 7 и 8. Включение контакторов может осуществляться специальными замыкателями. Все детали контактора монтируются на изолирующей основе 9. Выбор контакторов производится исходя из напряжения в цепи главных контактов и блок-контактов, а также значения и длительности протекания тока нагрузки. Эти данные приводятся в каталогах и справочниках.
12.3. Схемы блокировки и взаимной блокировки реле
На рис. 12.2 изображены типовые релейные схемы, наиболее часто встречающиеся в устройствах автоматики.
Схема экономичного включения реле (см. рис. 12.2, а). При срабатывании реле Р его собственные блок-контакты (БК) размыкаются и в цепь обмотки включается добавочное сопротивление Ra , которое до срабатывания реле было замкнуто накоротко размыкающим контактом. При этом ток в цепи резко уменьшается, что делает схему экономичной, так как в этом случае уменьшаются потери энергии в цепи обмотки, а следовательно, и ее нагрев. Уменьшение тока объясняется тем, что для удержания якоря в притянутом положении требуется значительно меньший ток в обмотке реле, чем ток срабатывания. Поэтому если реле должно находиться долго в притянутом состоянии, то выгодно после его срабатывания уменьшить значение тока в обмотке до минимального, необходимого для удержания якоря.
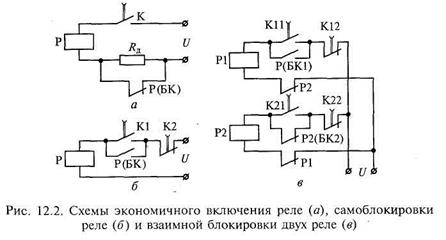
Схема самоблокировки реле (см. рис. 12.2, б). При нажатии кнопки К1 реле Р срабатывает и своим замыкающим контактом шунтирует кнопку К1; поэтому при отпускании кнопки К1 цепь обмотки реле остается замкнутой.
Для повышения экономичности схемы можно последовательно с контактором реле включить добавочное сопротивление. Для отключения реле достаточно нажать кнопку К2, при этом обмотка реле обесточится и его контакты, шунтирующие кнопку К1, разомкнутся. Эта схема нашла применение при кнопочном управлении каким-либо устройством.
Схема взаимной блокировки двух реле (см. рис. 12.2, в). Эта схема не допускает одновременного включения двух реле, что достигается введением в цепь обмотки одного из них размыкающих контактов другого. Обозначение каждого контакта показывает, какому реле этот контакт принадлежит. Например, если время срабатывания реле Р1 меньше, чем время срабатывания реле Р2, то при одновременном нажатии двух кнопок К11 и К21 срабатывает только реле Р1 и своими контактами размыкает цепь обмотки реле Р2. Если же одновременно срабатывают реле Р1 и Р2, то это приводит к выходу системы из строя (например, если одно реле служит для включения вращения двигателя в одном направлении, а другое реле — в другом).
12.4. Магнитные пускатели
Существует много видов автоматических схем управления электрическими двигателями, пуск и остановка которых осуществляются при помощи кнопок. Такие схемы выполняются в виде отдельных устройств, называемых магнитными пускателями. Магнитный пускатель — это один из видов контакторов, предназначенный для пуска трехфазных асинхронных двигателей.
На рис. 12.3, а изображена схема управления электрическим двигателем переменного тока с короткозамкнутым ротором с помощью нереверсивного магнитного пускателя. Эта схема состоит из контактора с тремя главными линейными контактами Л1, одного блок-контакта Б К, служащего для его самоблокировки после срабатывания при нажатии кнопки К1 (Пуск), и двух биметаллических тепловых реле РТ1 и РТ2 для защиты двигателя от перегрузки. Схема работает таким образом. Цепь управления присоединяется к цепи главного тока перед главными контактами пускателя (точки А и Б), в противном случае при отключенном контакторе цепь управления осталась бы без напряжения. При нажатии кнопки К1 (Пуск) образуется цепь: фаза А — контакт теплового реле КРТ1 — втягивающая катушка контактора Р — контакт теплового реле КРТ2 — нажатая кнопка К1 — замкнутая кнопка К2 (Стоп) — фаза Б.
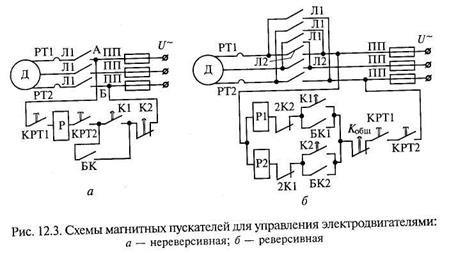
Если через катушку контактора пропустить ток, то она замыкает главные контакты и замыкающий блок-контакт БК. В результате электродвигатель Д, присоединенный к сети, начинает вращаться. При замыкании блок-контакта БК пусковая кнопка К1 шунтируется и может быть отпущена, так как ток в катушку Р проходит теперь через блок-контакт БК. При нажатии кнопки К2 (Стоп) цепь катушки обесточивается, поэтому размыкаются главные линейные контакты Л1 и блок-контакт БК, а электродвигатель останавливается. Тот же эффект достигается при отключении напряжения в цепи главного тока при снижении его до 65 % от номинального. Теперь магнитный пускатель самопроизвольно включиться не может, так как цепь катушки Р разомкнута контактами К1 и БК. Поэтому повторная подача напряжения в цепь главного тока не вызывает включения электродвигателя до тех пор, пока не будет вновь нажата кнопка К1 (Пуск). Таким образом, обеспечивается так называемая «нулевая защита».
Тепловые реле РТ1 и РТ2 включены в цепь главного тока, и через них проходит весь ток электродвигателя. Эти реле имеют размыкающие контакты КРТ1 и КРТ2, включенные последовательно с катушкой Р. При нормальной нагрузке двигателя контакты реле КРТ1 и КРТ2 замкнуты. При перегрузке двигателя одно или два реле (РТ1, РТ2) размыкают свои контакты КРТ1 и КРТ2, что вызывает обесточивание цепи катушки Р. Контакты Л1 и БК размыкаются, и электродвигатель останавливается. Дальнейший принцип работы теплового реле описан ранее. Так как тепловые реле обладают большой тепловой инерцией, то они не могут защитить электродвигатель при коротких замыканиях. Поэтому включение плавких предохранителей ПП необходимо даже при наличии тепловых реле.