
Двухтактные магнитные усилители с выходом на несущей частоте применяются главным образом для управления двигателями переменного тока и их реверсирования, а также в качестве магнитных модуляторов.








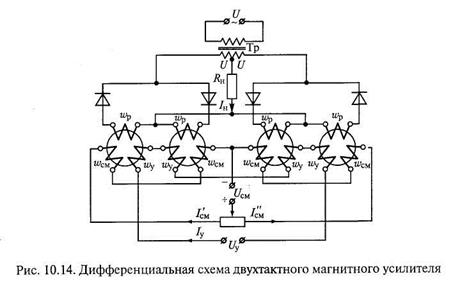
Двухтактные магнитные усилители с выходом на постоянном токе используются для управления двигателями постоянного тока и их реверсирования, а также для управления полем генератора постоянного тока, поляризованными электромагнитами, реле, муфтами и т.д. Простейшие двухтактные магнитные усилители обычно выполняются путем соединения двух однотактных усилителей по дифференциальной схеме (рис. 10.14). Оба усилителя в этой схеме питаются от одного трансформатора Тр с двумя одинаковыми вторичными обмотками. Токи смещения Iс'м и Iсм’’ поступающие в обмотки wсм, создают начальное подмагничивающее поле. Переменное сопротивление Rсм служит для балансирования (установки нуля) усилителя при отсутствии сигнала на его входе. Ток усиливаемого сигнала Iу поступает в обмотки w у и создает магнитное поле, совпадающее по направлению с полем смещения в одной паре сердечников и имеющее противоположное направление в другой паре. Поэтому ток I1 на выходе одного усилителя растет, а ток I2 на выходе другого усилителя уменьшается. Благодаря тому, что в нагрузке эти токи вычитаются, на выходе усилителя появляется ток нагрузки, значение которого Iн = I 1 - I 2 . При отсутствии сигнала на входе усилителя I 1 = I 2 и ток нагрузки равен нулю. При изменении полярности управляющего сигнала ток I1 на выходе первого усилителя начинает уменьшаться, а ток I2 на выходе второго усилителя возрастает. При этом результирующий ток Iн изменит свою фазу на 180°.
10.5. Электромашинные усилители
Электромашинный усилитель (ЭМУ) представляет собой коллекторный генератор постоянного тока. В электромашинных усилителях выходная (управляемая) электрическая мощность создается за счет механической мощности приводного двигателя.
В зависимости от способа возбуждения электромашинные усилители подразделяют на усилители продольного поля и усилители поперечного поля. В усилителях продольного поля основной поток возбуждения направлен по продольной оси машины, в усилителях поперечного поля основной поток возбуждения направлен по поперечной оси машины.
Важнейшей характеристикой ЭМУ является коэффициент усиления. Различают коэффициенты усиления по мощности kp , току k 1 и напряжению kU :

Электромашинные усилители могут иметь достаточно высокий коэффициент усиления по мощности (103... 105).
Важным показателем ЭМУ является быстродействие, характеризуемое постоянными времени его цепей. Электромагнитная постоянная времени определяется энергией магнитного поля, изменяющегося в процессе регулирования. Для электрической цепи постоянная времени

где L — индуктивность цепи; R — активное сопротивление цепи.
В ЭМУ постоянная времени τ = 0,02...0,20 с.
ЭМУ должны обладать большим коэффициентом усиления по мощности и высоким быстродействием, т. е. иметь минимальные постоянные времени. Для удобства сравнения различных усилителей вводят коэффициент добротности k Д , равный отношению коэффициента усиления по мощности к сумме постоянных времени ступеней усиления:

К ЭМУ, работающим в системах автоматического регулирования, предъявляется требование минимальности погрешности отображения функциональной зависимости, т. е. отклонения от линейной действительной зависимости их выходного напряжения от тока управления. При выполнении этого требования ЭМУ сохраняет неизменное значение коэффициента усиления при изменении сигнала управления.
В системах автоматического регулирования ЭМУ применяют в качестве усилителей мощности, работающих в основном при переходных режимах, в процессе которых возникают значительные перегрузки по току. Поэтому одним из требований к ЭМУ является хорошая перегрузочная способность.
Простейшим электромашинным усилителем (независимым ЭМУ) является обычная коллекторная машина постоянного тока, работающая в режиме генератора независимого возбуждения. В качестве обмотки управления в ней «Используется обмотка возбуждения главных полюсов. При необходимости число обмоток управления может быть увеличено от 2 до 4. Выходная мощность ЭМУ снимается с обмотки якоря.
Коэффициент усиления независимого ЭМУ относительно невелик: kp = 20... 100. Однако в системах генератор—двигатель, где от двигателя требуется изменение частоты вращения в широком диапазоне, генератор работает в режиме ЭМУ независимого возбуждения. Для малых мощностей наиболее распространенными являются ЭМУ поперечного поля.
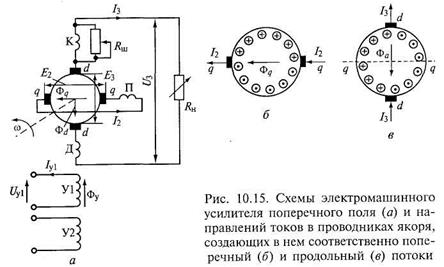
На рис. 10.15, а представлена схема ЭМУ поперечного поля. Конструктивно ЭМУ выполнен подобно генератору постоянного тока, но имеет дополнительный комплект щеток, установленных на поперечной оси qq машины и замкнутых накоротко. На статоре ЭМУ расположен ряд обмоток. Вдоль продольной оси dd полюсов находятся обмотки управления У (обычно две или четыре). Соосно с ними расположена компенсационная обмотка К. Для регулирования степени компенсации усилителя последняя шунтирована регулирующим сопротивлением R ш .
В этой же цепи для улучшения коммутации включена обмотка дополнительных полюсов Д. Иногда для этого в поперечную цепь последовательно с якорем включают поперечную обмотку подмагничивания П, имеющую малое сопротивление.
Рассмотрим принцип действия ЭМУ поперечного поля. Пусть угловая скорость ω приводного двигателя равна номинальной ωном, т. е. ω = ωном, и к одной из обмоток управления приложено напряжение постоянного тока Uy 1 . При высоком коэффициенте усиления на вход усилителя подается малая мощность. Тогда под действием небольшого магнитного потока управления Фу в поперечной цепи qq обмотки якоря возникает небольшая ЭДС

где k = pN /(2πa ) — конструктивный коэффициент, зависящий от числа пар полюсов/» машины, числа пар параллельных ветвей a и числа проводников N в обмотке якоря. В поперечной цепи якоря проходит ток I2, значение которого довольно велико, так как цепь имеет малое сопротивление.
На рис. 10.15, б показано направление тока I2 в проводниках якоря, создающего поперечный поток якоря Фq . Под действием этого потока в продольной цепи dd якоря возникает ЭДС Е3 = kωФq, которая снимается продольными щетками. ЭДС Е3 вызывает появление тока I3, и на сопротивлении RH происходит падение напряжения U3.
На рис. 10.15, в показано направление тока I3 в проводниках якоря, создающего продольный поток якоря Фd, который направлен навстречу потоку управления Фу. Если не принять мер, то большой по значению поток Фd размагнитит усилитель и никакого усиления не произойдет. Для компенсации продольного потока якоря на статоре расположена компенсационная обмотка K.
Продольный поток якоря Фd пропорционален магнитодвижущей силе (МДС):

где w — число витков в параллельной ветви обмотки якоря.
Таким образом, продольная МДС Fd якоря и, следовательно, пропорциональный ей магнитный поток Фd изменяются с изменением тока I3, т. е. зависят от сопротивления нагрузки RH . Хорошее компенсирующее действие обмотка K производит в том случае, если МДС этой обмотки также зависит от тока I3. Поэтому обмотку K включают в продольную цепь машины последовательно с обмоткой якоря. Тогда МДС компенсационной обмотки

где wk — число витков компенсационной обмотки.
Степень компенсации усилителя характеризуется коэффициентом компенсации

Различают три возможных случая работы усилителя: kk = 1 — машина скомпенсирована; kk < 1 — машина недокомпенсирована; kk > 1 — машина перекомпенсирована.
Обычно ЭМУ выпускают с небольшой перекомпенсацией: МДС компенсационной обмотки примерно на 5 % больше продольной МДС якоря, т.е. kk = 1,05.
Регулирование степени компенсации производится шунтирующим сопротивлением R ш . С учетом R ш МДС компенсационной обмотки
Для улучшения коммутации в продольной цепи якоря располагают на статоре по оси dd дополнительные полюса. Для улучшения коммутации в поперечной цепи якоря снижают значение тока I2, а чтобы при этом не снизить магнитный поток по поперечной оси, на статоре укладывают поперечную обмотку подмагничивания П (см. рис. 10.15, а). Эта обмотка создает поток Фп, направленный согласно с поперечным потоком якоря. Таким образом, при включении обмотки подмагничивания П в цепь поперечных щеток магнитный поток поперечной оси Ф' q = Фq + Фп.
Статические и динамические характеристики электромашинного усилителя поперечного поля
Важнейшим показателем ЭМУ поперечного поля является коэффициент усиления по мощности. Высокое значение этого коэффициента обусловлено тем, что ЭМУ поперечного поля является двухступенчатым. Первая ступень усиления — обмотка управления — короткозамкнутая цепь поперечных щеток. Вторая ступень усиления — короткозамкнутая цепь поперечных щеток — выходная цепь продольных щеток. Общий коэффициент усиления по мощности

где kP 1 — коэффициент усиления первой ступени; kp 2 — коэффициент усиления второй ступени. Причем

Подставляя значения коэффициентов усиления ступеней в формулу для вычисления общего коэффициента усиления по мощности, получим
где Ry — сопротивление обмотки управления.
Коэффициенты усиления по мощности каждой ступени можно записать через основные параметры машины и нагрузки. Для этого токи в продольной и поперечной цепях якоря следует выразить в соответствии с законом Ома через ЭДС якоря и сопротивления, ЭДС якоря — через угловую скорость якоря и магнитный поток, а последний — через ток и индуктивность обмоток, создающих этот поток.
При полной компенсации ЭМУ (kk = 1) формула результирующего коэффициента усиления по мощности, полученная в результате указанного преобразования, примет вид
где c — конструктивный коэффициент; Δd , Δq — магнитные проводимости соответственно по продольной и поперечной осям машины; R2, R3 — активные сопротивления соответственно поперечной и продольной цепей ЭМУ; ω — угловая скорость якоря; τу = Ly / Ry — постоянная времени обмотки управления; τ2 = L 2 / R 2 — постоянная времени поперечной цепи; Ly , L 2 — соответственно индуктивности обмоток управления и поперечной цепи ЭМУ.
Из приведенной формулы видно, что коэффициент усиления по мощности тем больше, чем меньше воздушный зазор и насыщение магнитной цепи (больше Δd и Δq ) и выше угловая скорость. В то же время чрезмерно увеличивать угловую скорость нельзя, так как могут ухудшиться условия коммутации под продольными и поперечными щетками и условия механической прочности машины.
Коэффициент усиления k Р прямо пропорционален постоянным времени обмоток управления и поперечной цепи, т. е. требования максимального усиления и максимального быстродействия взаимно противоречивы.
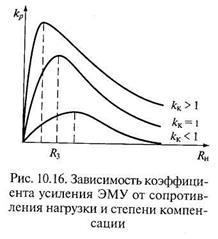
Коэффициент усиления по мощности существенно зависит от сопротивления нагрузки и степени компенсации ЭМУ (рис. 10.16). При полной компенсации kk = 1 коэффициент усиления по мощности достигает максимального значения при соблюдении условия R 3 = RH , т. е общего условия для работы генератора на пассивную нагрузку. В случае перекомпенсации kk > 1 за счет подмагничивающего действия разностной МДС компенсационной обмотки и продольной цепи якоря коэффициент усиления по мощности больше и его максимум наступает при меньшем сопротивлении нагрузки, чем при kk = 1. При недокомпенсации kk < 1, соответственно, все наоборот.
Основными статическими характеристиками ЭМУ поперечного поля являются внешние и регулировочные.
Внешние характеристики — это зависимость U3 = f(I3) при постоянных угловой скорости приводного двигателя со = const и сигнале на обмотке управления. Вид внешних характеристик непосредственно связан с зависимостью тока в поперечной цепи I3 от выходного тока, проходящего через нагрузку (рис. 10.17). Характеристики построены для всех трех случаев компенсации: полной (kk = 1), перекомпенсации (kk > 1) и недокомпенсации (kk < 1).
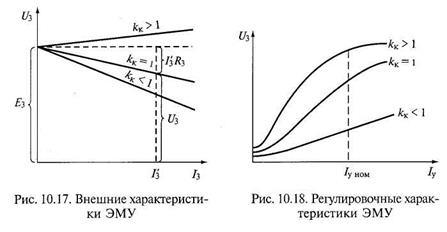
При полной компенсации выходное напряжение на сопротивлении нагрузки
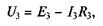
где Е3 — ЭДС холостого хода.
Регулировочные характеристики — это зависимости выходного напряжения или выходного тока от тока управления при ω = const и RH = const (рис. 10.18). Вид этих характеристик определяется формой кривой намагничивания машины. При малых токах управления нелинейность характеристики, т. е. погрешность ЭМУ, и соответственно непостоянство коэффициента усиления объясняются наличием остаточной ЭДС. В области больших токов управления эти явления связаны с насыщением магнитной цепи.
При использовании ЭМУ в замкнутых системах автоматического регулирования (стабилизаторах, регуляторах, следящих системах) машина должна быть несколько недокомпенсирована (kk = 0,97...0,99), так как в случае перекомпенсации в системе во время работы может возникнуть возмущение за счет избытка МДС компенсационной обмотки, которое приведет к возникновению автоколебаний системы.
Применение электромашинных усилителей
Электромашинные усилители выпускают серийно и широко применяют в системах автоматического регулирования и автоматизированного электропривода. В системах генератор — двигатель — генератор, а часто и возбудитель, по существу представляет собой независимые ЭМУ, соединенные в каскад. Наибольшее распространение получили ЭМУ поперечного поля. Эти усилители имеют следующие основные преимущества:
большой коэффициент усиления мощности (до 0,5 • 104 у ЭМУ мощностью менее 750 Вт и до 105 у ЭМУ большей мощности);
малую входную мощность, позволяющую питать обмотки управления от электронных усилителей;
достаточное быстродействие, т. е. малые постоянные времени цепей усилителя (у ЭМУ мощностью до 750 Вт эквивалентная электромагнитная постоянная времени составляет около 0,1 ...0,2 с);
достаточные надежность, долговечность и широкие диапазоны изменения мощности;
возможность изменения характеристик путем регулирования степени компенсации.
Недостатком ЭМУ является наличие остаточной ЭДС. Наводимая в якоре потоком остаточной намагниченности, она искажает линейную зависимость выходного напряжения от входного сигнала в зоне малых сигналов; при этом нарушается однозначность зависимости выходных параметров ЭМУ от входных и изменяется полярность входного сигнала, так как поток остаточного магнетизма при одной полярности сигнала увеличивает поток управления, а при другой — уменьшает.
Следует отметить, что с внедрением магнитных и тиристорных усилителей использование ЭМУ в системе генератор—двигатель значительно сократилось. Однако ЭМУ находит все большее применение в системах ЭМУ—двигатель, где ЭМУ используется в качестве генератора, питающего двигатель. В результате использования промежуточных полупроводниковых усилителей значительно увеличились диапазоны регулирования и быстродействие электроприводов, работающих по системе ЭМУ—двигатель. Такие электроприводы применяют в различных областях, в связи с чем растет производство ЭМУ поперечного поля. Последнему обстоятельству способствует наличие нескольких обмоток управления в ЭМУ, что позволяет сравнивать сигналы и вводить обратные связи.
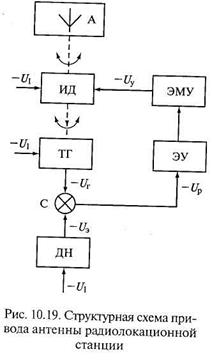
На рис. 10.19 показана схема привода антенны радиолокационной станции в режиме кругового вращения с постоянной угловой скоростью. Схема состоит из исполнительного двигателя постоянного тока с якорным управлением ИД, приводящего во вращение антенну А, тахогенератора постоянного тока ТГ, механически связанного с валом ИД, и двух усилителей: электронного ЭУ и ЭМУ поперечного поля. При мощности исполнительного двигателя в несколько сотен ватт и более такая двухступенчатая схема усиления с ЭМУ поперечного поля может иметь лучшие технико-экономические характеристики, чем чисто электронная. Задающим элементом является делитель напряжения ДН, питающийся от источника постоянного тока.
Привод работает следующим образом. Необходимая угловая скорость задается соответствующим эталонным напряжением U э . Это напряжение через элемент сравнения С поступает на вход усилителя ЭУ. После усиления в ЭУ и ЭМУ напряжение Uy подается на обмотку управления исполнительного двигателя, обмотка возбуждения которого постоянно подключена к источнику напряжения U 1 . Ротор двигателя начинает вращаться и поворачивать антенну А и ротор тахогенератора ТГ. Выходное напряжение тахогенератора UГ сравнивается в узле С с эталонным напряжением U э , и на выходе усилительного каскада устанавливается постоянное значение Uy , определяемое напряжением рассогласования Up . Ротор ИД и антенна непрерывно вращаются с постоянной угловой скоростью.