Магнитные и электромашинные усилители








10.1. Классификация и принцип действия магнитных усилителей
Магнитным усилителем называется усилитель электрических сигналов, действие которого основано на использовании нелинейности характеристик ферромагнитных материалов. Магнитные усилители применяются в разнообразных устройствах: от точных измерительных приборов до схем автоматического управления крупными производственными агрегатами (прокатными станами, экскаваторами и т.п.). Широкое применение магнитных усилителей определяется рядом их достоинств:
большим сроком службы, высокой надежностью, простотой эксплуатации;
широким диапазоном усиливаемых мощностей: от 10-13... 10-6 Вт до несколько десятков и даже сотен кВт; постоянной готовностью к работе;
возможностью суммировать на входе несколько управляющих сигналов;
значительной перегрузочной способностью; пожаро- и взрывобезопасностью;
стабильностью характеристик в процессе эксплуатации. Магнитные усилители различают по следующим признакам: виду статической характеристики — однотактные (нереверсивные) и двухтактные (реверсивные);
способу осуществления обратной связи (ОС) — без ОС и с ОС (внешней, внутренней, смешанной);
форме кривой выходного напряжения — с выходом на несущей или удвоенной частоте, на постоянном или выпрямляемом токе и т.д.;
способу включения нагрузки — с последовательным и параллельным включением нагрузки и рабочих обмоток;
числу и конструкции сердечников в однотактной схеме — с одним двухстержневым или тороидным сердечником, с двумя сердечниками, трехстержневым и четырехстержневым сердечниками;
способу осуществления смещения — постоянным или переменным током и шунтированием выпрямителей ОС;
режиму работы — линейные (или пропорциональные) и релейные.
Простейшие магнитные усилители без ОС выполняются в виде двух одинаковых трансформаторов. Рабочие обмотки этих трансформаторов с числом витков w р включаются последовательно с источником питания переменного напряжения U(рис. 10.1). Управляющие обмотки с числом витков wy включаются встречно относительно рабочих обмоток для устранения трансформаторной связи между цепями, образуемыми управляющими и рабочими обмотками. Усиливаемый сигнал постоянного тока Iу поступает в управляющие обмотки wy трансформаторов и вследствие нелинейного характера кривой намагничивания сердечников вызывает уменьшение их магнитной проницаемости и пропорциональное уменьшение индуктивности L 1 рабочих обмоток.
Устройство, имеющее схему, приведенную на рис. 10.1, часто называют дросселем насыщения или управляемым дросселем, так как, изменяя степень магнитного насыщения его сердечников путем подмагничивания их постоянным током, можно в широких пределах изменять индуктивность рабочих обмоток. Нагрузка RH , показанная на рисунке пунктиром, включается в цепи переменного тока параллельно или чаще последовательно с управляемой индуктивностью.

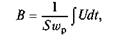
Токи I1 и I2, протекающие соответственно в рабочей и управляющей обмотках трансформаторов, создают магнитные поля, которые в течение одного полупериода переменного тока в одном из сердечников имеют одинаковые, а в другом — противоположные направления. В результате первый сердечник насыщается, а второй остается ненасыщенным. Для ненасыщенного сердечника справедливо уравнение обычного трансформатора:
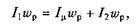
где Iμ — намагничивающий ток трансформаторов.
При отсутствии сигнала на входе усилителя I2 = 0 и I1 = Iμ. В этом режиме среднее значение тока нагрузки имеет минимально возможное значение, равное току холостого хода трансформатора Iхх.
При наличии существенного сигнала Iу на входе усилителя обычно можно пренебречь слагающей Iμω р в правой части уравнения ампервитков по сравнению с I 2 w у . Тогда, интегрируя в пределах полупериода, в течение которого рассматриваемый сердечник ненасыщен, получим

т.е. ток нагрузки в схеме на рис. 10.1 определяется лишь током управления и конструктивными параметрами усилителя и не зависит от нагрузки.
Коэффициенты усиления по току k 1 и мощности k Р для простейшего магнитного усилителя определяют по формулам

где Ry — активное сопротивление управляющий обмотки.
Существенным недостатком таких магнитных усилителей является их относительно высокая инерционность, которую обычно характеризуют постоянной времени τ цепи управления: τ = kp /4ηf , где η — КПД цепи нагрузки; f— частота источника питания. Для уменьшения инерционности магнитных усилителей применяют переменный ток повышенной частоты (400... 10 000 Гц и выше).
10.2. Магнитные усилители с самонасыщением
Лучшими динамическими характеристиками, т. е. меньшей инерционностью при данном k Р , обладают магнитные усилители с самонасыщением. Простейшая схема магнитного усилителя с самонасыщением, на базе которой строятся более сложные схемы, дана на рис. 10.2. Идеализированная петля гистерезиса ферромагнитного сердечника магнитного усилителя представлена на рис. 10.3. Наличие выпрямителя В (см. рис. 10.2) в цепи рабочей обмотки (обмотка w р усилителя, последовательно с которой включена нагрузка RH ) приводит к тому, что напряжение питания U приложено к этой обмотке и нагрузке лишь в течение проводящего для выпрямителя полупериода, называемого рабочим.
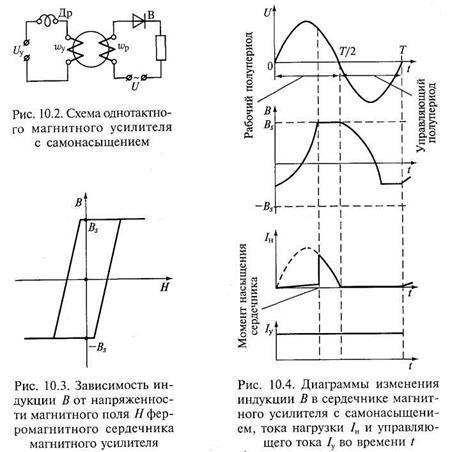
В соответствии с законом электромагнитной индукции изменение индукции в рабочем сердечнике усилителя в этот полупериод происходит только под действием напряжения питания U :
где S — поперечное сечение сердечника.
В следующий полупериод изменение индукции в сердечнике происходит только под действием управляющего напряжения Uy , приложенного к обмотке управления wy . Этот полупериод называется управляющим.
Для того чтобы воспрепятствовать трансформации напряжения из рабочей цепи в цепь управления, в последнюю включают либо дроссель Др, либо вентиль.
Изменение индукции в рабочем и управляющем полупериодах происходит во взаимообратных направлениях. Обычно напряжение питания магнитных усилителей U выбирают таким, чтобы за время T/2, равное полупериоду питающего напряжения, оно было бы способно изменить индукцию в сердечнике на величину ΔВ = 2 BS , от точки - Bs до Bs , где Bs — индукция насыщения материала сердечника. Это изменение пропорционально входному сигналу. Если к началу рабочего полупериода исходная рабочая точка, характеризующая магнитное состояние сердечника, окажется не в точке - Bs , а выше на петле гистерезиса, то в рабочем полупериоде сердечник по закону электромагнитной индукции насытится не в конце периода, а несколько раньше. После этого напряжение питания окажется полностью приложенным к сопротивлению нагрузки, а ток в нагрузке скачком возрастет до I = Umaxsin wt / R . Чем больше управляющее напряжение, тем ниже по петле гистерезиса опустится рабочая точка в управляющий полупериод. В результате в рабочий полупериод сердечник насытится позднее, и к нагрузке будет приложено меньшее напряжение. При максимальном управляющем напряжении по нагрузке в течение всего рабочего полупериода протекает только намагничивающий ток.
Если управляющее напряжение равно нулю, то в управляющий полупериод индукция не изменяется и исходной точкой тока будет точка Bs . Следовательно, в течение всего рабочего полупериода ток в нагрузке будет следовать за изменением напряжения. Диаграммы изменения индукции В в сердечнике, тока нагрузки Iн, тока в обмотке управления Iу во времени t даны на рис. 10.4. Зависимость тока Iн нагрузки от тока Iу в обмотке управления для магнитных усилителей с самонасыщением приведена на рис. 10.5.
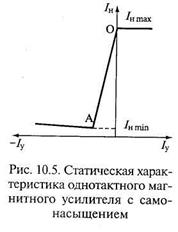
Характеристики подобного типа называются статическими характеристиками, а участок АО — рабочим участком. Магнитный усилитель, обладающий статической характеристикой, показанной на рис. 10.5, называют однотактным (нереверсивным). Основная особенность такого усилителя в том, что при изменении полярности управляющего сигнала ток в нагрузке, изменяясь по значению, остается все время однополярным.
Схема, приведенная на рис. 10.2, является основой — типовым элементом при создании большинства современных магнитных усилителей. Рабочие полупериоды двух сердечников в схемах на рис. 10.6, 10.7 сдвинуты друг относительно друга на половину периода питающего напряжения. Обмотки управления двух сердечников соединены между собой так, чтобы в цепи управления не наводилось питающее напряжение. Если в однотактном магнитном усилителе (см. рис. 10.2) ток на выходе появляется лишь в течение одного из полупериодов питающего напряжения, то в усилителях, представленных на рис. 10.6 и 10.7, он появляется в течение каждого полупериода питающего напряжения.
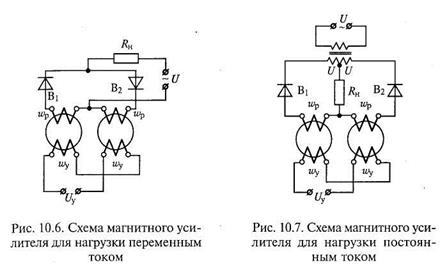
В то время как один из сердечников находится в рабочем полупериоде и ток от источника может протекать через его рабочую обмотку wp и нагрузку, один из диодов блокирует рабочую обмотку другого сердечника, для которого наступает управляющий полупериод, т.е. его индукция изменяется под действием входного сигнала. В следующем полупериоде сердечники меняются ролями. В схеме на рис. 10.6 через нагрузку протекает переменный ток той же частоты, что и питающее напряжение, а в схеме на рис. 10.7 — выпрямленный двухполупериодный ток.
В магнитных усилителях с самонасыщением при отсутствии управляющего сигнала среднее значение тока нагрузки равно максимальному Iнmах. Однако иногда бывает необходимо при отсутствии сигнала на входе усилителя получить минимальный ток в нагрузке. Поэтому в магнитных усилителях часто предусматривается так называемое смещение или начальное подмагничивание, что равноценно включению дополнительного управляющего напряжения. Под действием напряжения смещения изменение индукции в управляющем полупериоде происходит даже при отсутствии сигнала управления. Чем больше напряжение смещения, тем ниже по петле гистерезиса переместится рабочая точка.
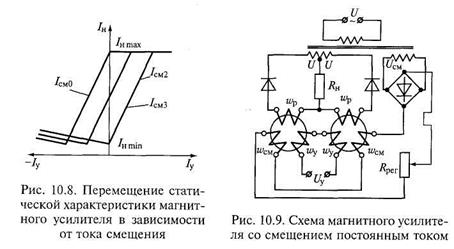
В том случае, когда на вход усилителя подается также сигнал управления, перемещение рабочей точки в управляющий полупериод определяется суммой напряженностей, создаваемых сигналами смещения и управления (если эти сигналы вызывают изменение намагниченности сердечника в одном направлении), или их разностью (если действие сигналов противоположно). Введение начального подмагничивания позволяет как бы перемещать статическую характеристику усилителя вдоль оси абсцисс в зависимости от значения тока смещения (рис. 10.8). Очевидно, что при изменении тока смещения Iсм ток на выходе усилителя при отсутствии управляющего сигнала Iу может принимать любые значения от IHmax до IHmin.
Принципиально смещение в магнитных усилителях может осуществляться тремя способами: постоянным или выпрямленным током, переменным током, шунтированием выпрямителей в рабочей цепи сопротивлением. Наиболее широко применяется смещение постоянным током (рис. 10.9). Обмотки смещения обычно выполняются так же, как и обмотки управления. Последовательно с обмотками смещения для регулирования тока в них включают дополнительное сопротивление.
10.3. Магнитные усилители с обратными связями
В магнитных усилителях с самонасыщением по рабочим обмоткам наряду с переменной протекает и постоянная составляющая напряжения, которая дополнительно подмагничивает сердечники. По этой причине их иногда называют магнитными усилителями с внутренней обратной связью. В таких усилителях большую часть подмагничивающего поля составляет именно магнитное поле обратной связи и лишь сравнительно небольшую часть — магнитное поле управляющего сигнала.
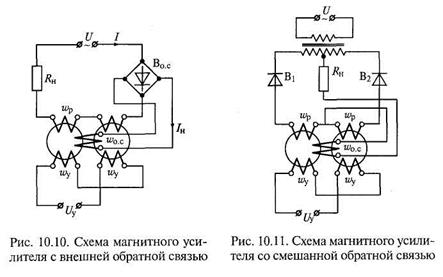
Магнитное поле обратной связи может быть создано, например, путем подачи тока нагрузки в специальную обмотку обратной связи wo . c (рис. 10.10), называемую внешней.
Использование внутренней обратной связи, особенно в мощных магнитных усилителях (по сравнению с магнитными усилителями с внешней обратной связью) существенно повышает их КПД и максимальную мощность.
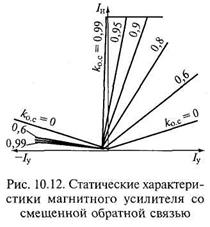
Для достижения больших значений k о.с в схемы усилителей с внутренней обратной связью дополнительно вводится обмотка обратной связи (рис. 10.11). Поскольку в этом случае в усилителе действует как внутренняя, так и внешняя обратная связь, эту схему часто называют схемой со смешанной обратной связью. Статические характеристики усилителя при различных значениях k о.с даны на рис. 10.12.
Динамические свойства магнитных усилителей с самонасыщением характеризуются постоянной времени
где kU — коэффициент усиления по напряжению, kU = ΔUH/ΔUy .
10.4. Двухтактные магнитные усилители
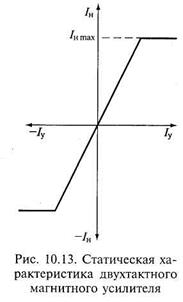
Двухтактным магнитным усилителем называется усилитель, обладающий статической характеристикой, при которой изменение полярности управляющего сигнала вызывает изменение полярности выходного напряжения или изменение фазы выходного напряжения на 180° (рис. 10.13).
Двухтактные схемы нередко применяют для повышения стабильности характеристик усилителя или снижения тока холостого хода, равного IHmin, и повышения коэффициента кратности тока нагрузки IHmax/IHmin даже в тех случаях, когда не требуется изменять фазу или полярность выходного напряжения.
Двухтактные магнитные усилители могут быть выполнены с обратной связью и без нее, а также по специальным быстродействующим схемам.