
Разработка создания движителей по различным технологиям и материалам для








Всероссийский конкурс исследовательских и проектных работ
школьников «Высший пилотаж»
Разработка создания движителей по различным технологиям и материалам для
мягкой робототехники
Проект
Направление «Технические и инженерные науки»
Автор: Буторин Андрей Андреевич,
учащийся 11 класса,
Школа-лицей №2 г. Кокшетау
2023 г.
Аннотация
В проектной работе был разработан движитель с различными технологиями изготовления для использования в мягкой робототехники. В ходе создания движетели были использованы такие материалы, как термопластичный полиуретан, полиэтиленовая пленка, литейный силикон на оловянной основе. Движитель из термопластичный полиуретане изготовленный по технолигии послойного напления пластика (FDM) оказался менее износостойким по сравнению с остальными материалами и технологиями. Движитель из полиэтиленовая пленка изготовленный по технолигии сварки путем нагревания материала в точках соединия оказался более эластичным, но главным недостатком данной технологии является сложность изготовления. Наилучшим материлом и технологии оказался движитель из литейного силикона на олявянной основе изготовленный путем иннерционного литья так, как он был таким же эластичным, износостойким, легким в изготовлении.
Робототехника развивается в направлении создания более мягких и гибких роботов [1]. По оценкам отраслевой исследовательской фирма Market Research Future мировой рынок мягкой робототехники станет свидиделем экспоненциального роста доходов к 2027 году, увеличиваясь с впечатляющим CAGR в течение оценочного периода (2020-2027 годы) [2]. Сферы применения мягкой робототехники затрагивают пищивую промышленность, медицину и хирургию, космонавтику. В пищивой промышлености мягкие роботы могут использоваться для «захвата» хрупких товаров (например, яиц), обнаружения слишком спелых или испортившихся продуктов, перестановки контейнеров неправильной формы, комплектации продуктовых корзин. В сфере медицины они используются для операции, а также для обследования и восстановления внутренних органов, реабилитации функций верхних и нижних конечностей. В космонавтике работают над созданием устройств из силикона, которые можно будет использовать для изучения жизни на других планетах [3]. Другими слова есть множества ислледовании и информации по использованию мягкой робототехнике, но главня проблема заключается в отсуствии информации по технологиям и материалам которые используются для этого. В моем проекте я постораюсь раскрыть данные недостатки информации и сделать сравнивнительный анализ.
Цель данного проекта заключается в изучении материалов и технологии в изготовлении движителей для мягкой робототехники с последющим применением в различных отрослях человеческой деятельности.
Для этого были поставлены следующие задачи:
1. Изучить теоритические материалы по мягкой робототехнике, материлам и технологиям изготовления движителей;
2. Создание движителей из различного материала и технологии;
3. Провести сравнительный анализ полученных движителей.
Как было выше изложено из-за отсуствия или очень малой информации по теме технологиям и материалам используемых в мягкой робототехнике, особенно по сравнению различных характеристик сложно провести анализ существующих решении.
Для получение сравнительных характеристик материалов и технологии мягкой робототехники. Мною был создан движитель из трех разных материалов и технологии изготовления. Первым шагом было созданию 3Д модели деталей движителей (рис 1).


Рисунок 1. Детали для движителя.
 Следующий шаг состоял в создании 3Д модели форм для отливания (рис 2).
Следующий шаг состоял в создании 3Д модели форм для отливания (рис 2).
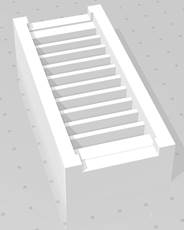

Рисунок 2. Формы моделей для отливки.
Далее я изготовил формы по ранее созданным моделям посредством печати на 3Д принтере (рис 3).


Рисунок 3. Формы напечатанные на 3Д принтере.
Первой движитель был изготовлен из термопластичного полиуретана путем печати на 3Д принтере (рис 4).
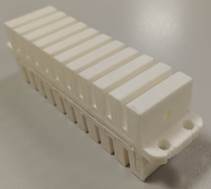
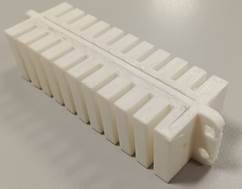
Рисунок 4. Движитель из термопластичного полиуретана.
Данный движитель оказался прост в изготовлении, но по своим характеристикам уступает другим движителям описываемых ниже. При тестировании он не выдержал большого давления. Для решения данного изьяна нужно было увеличить тольщину стенки, но в таком случае движитель не сравлялся со своей основной функцией. Данный метод и материал имеет право на жизнь в условиях изменения конструкции движителя.
Второй движитель был изготовлен из полиэтиленовой пленки изготовленной по технолигии сварки путем нагревания материала в точках соединия (рис 5).


Рисунок 5. Движитель из полиэтиленовой пленки.
Движитель из полиэтиленовой пленки (полиэтилен высокого давления) оказался более эластичным, износостойким, а также экономически выгодным по сравнению с первым движителем. Но главным недостатком данного движителя было растяжение материала.
Третий движитель был изготовлен из литейный силикон на оловянной основе (рис 6).

Рисунок 6. Движитель из литейный силикон на оловянной основе.
При создании данного движителя использовались ранее заготовленные формы для литья. А также он показал наилучшие характеристики среди остальных движителей. Он такой же эластичный, износостойкий, а также в отличии от полиэтиленовой пленки он может вернуть прежнею форму.
Исходи из проведенных экспериментов можно сделать следующий выводы:
Использование полиэтиленовой пленки экономический выгодно и изготовление является более доступным.
Использование литейного силикон на оловянной основе по всем характеристикам лучше, но процесс изготовления требует определенных принадлежностей (литейные формы, весы, вакуумная камера для дегазации, центривуга).
Список источников:
1 Подтелкина О.А. Преимущества и перспективы развития мягких робототехнических комплексов/ О.А. Подтелкина// Ежемесячный научно-методический журнал издательства «Проблемы науки». – Москва, 2019. – №3. – С. 32-33.
2 Анализ рынка мягкой робототехники, возможности роста, лидеры отрасли, будущие перспективы, прогноз спроса и анализ COVID-19 2027:сайт. – https://icrowdru.com (17.02.2022) . – Текст: электронный.
3 Что нужно знать о мягких роботах: сайт. – https://plus-one.rbc.ru/economy/chto-nuzhno-znat-o-myagkih-robotah. (22.07.2021) . – Текст: электронный.