
Математическое моделирование электропривода компрессорной установки с частотным управлением








Уравнения, описывающие асинхронный двигатель в координатах a,b выглядят следующим образом:
Преобразовав их можно получить:
 ,
,
 ,
,
 ,
,
 ,
,
Мэ = 3/2*Lmp(IraIsb - IrbIsa)
Модель системы управления электроприводом насосной установки содержит следующие блоки: задатчик интенсивности, преобразователь частоты, регуляторы скорости и тока статора двигателя, модель компрессорной нагрузки.
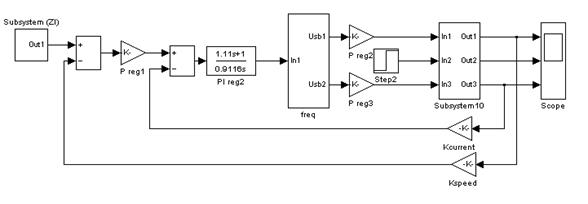
Рис.1. Структурная схема системы автоматического управления
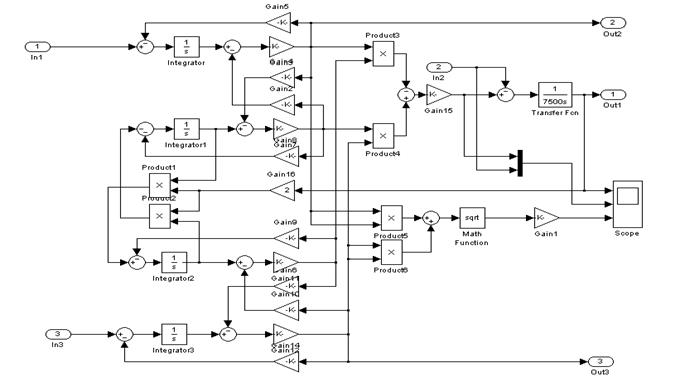
Рис.2. Структурная схема асинхронного двигателя в среде Matlab
Время шага -2.5с
Рис. 3 . компрессорная нагрузка в среде Matlab
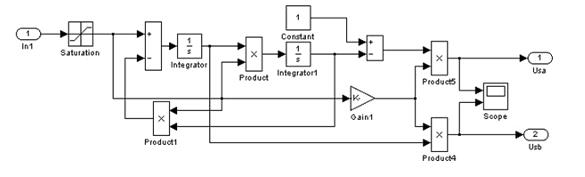
Рис.4.Структурная схема идеализированного преобразователя частоты в среде Matlab
Результаты моделирования
 В результате моделирования были получены следующие графики переходных процессов:
В результате моделирования были получены следующие графики переходных процессов:
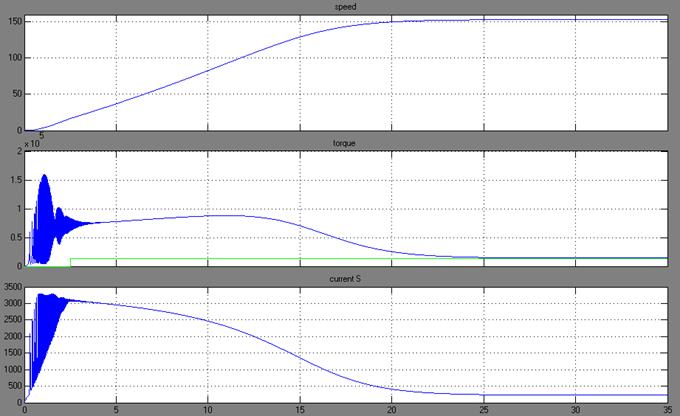
Рис.5.Переходные процессы в системе автоматического управления приводом компрессорной установки.
Полученные переходные процессы затухают, что свидетельствует о правильности проведённого расчёта. Определяем показатели качества:
По заданию:
· Установившееся отклонение δУСТ = 0%. так как в системе присутствует интегральное звено(ПИ-регулятор тока статора), следовательно, система астатична;
· Время регулирования ТРЕГ = 26 с.;
· Перерегулирование  ;
;
· Показатель колебательности ψ = 1;
· Степень затухания  ;
;
Выводы по результатам моделирования
o Как из графиков видно, что предлагаемая САУ обеспечивает необходимое качество переходных процессов. Значения настраиваемых параметров САУ выбраны верно.
o Показатели качества разработанной САУ не хуже, чем соответствующие показатели существующей системы.
ПРОГРАММА ДЛЯ КОНТРОЛЛЕРА
Согласно заданию, для функциональной реализации алгоритма управления пуском привода на микроконтроллере S7-200 разработана управляющая программа с помощью прикладной программы STEP7-Micro/WinSP1 V3.1. Микроконтроллер, встроенный в систему управления, по программе осуществляет: проверку блокировок, пуск привода с заданной интенсивностью разгона и торможения, останов.
К контроллеру подключена кнопка «ПУСК» (вход I0.0), кнопка «СТОП» (вход I0.1), контакты блокировок (входы I0.2 - I0.5).
При нажатии кнопки ПУСК ячейка памяти М0.0 устанавливается в единичное состояние, при этом запускается таймер Т37. сигнал с таймера появляется через 1 сек. и опрашивает контакты блокировок. Если все условия выполняются, то подается напряжение на преобразователь частоты. Сигнал с таймера Т38 появится через 2 сек. и происходит запуск двигателя.
Пример реализации программы на микроконтроллере представлен на рисунке:
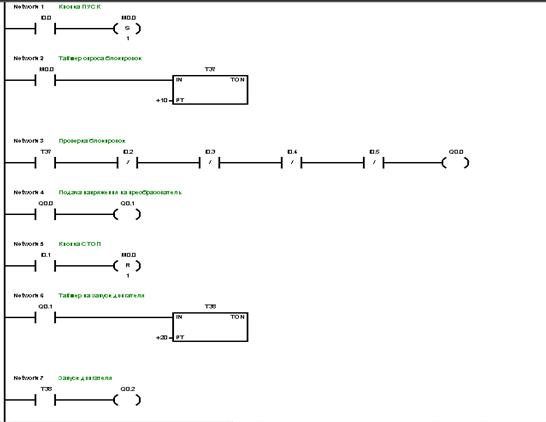
Рис.6. Программа для микроконтроллера
Список используемой литературы
1. Дьяконов В.А., Круглов В.М., «Математические пакеты расширения MATLAB». Специальный справочник. – СПб. Издательство “Питер”. 2001.
2. «Системы управления электроприводов». Учебник для вузов. Под редакцией Терехова В.М., 2005.
3. Чиликин М.Г., Сандлер А.С., «Общий курс электропривода». Учебник для вузов . – 6е изд., доп. и перераб. – М.: Энергоиздат, 1981.
4. Курс лекций под руководством Рудакова В.В (4 к, 2 сем)