
Механико-технологический факультет








Министерство образования и науки РФ
Государственное образовательное учреждение
высшего профессионального образования
«Владимирский государственный университет
имени Александра Григорьевича и Николая Григорьевича Столетовых»
(ВлГУ)
Механико-технологический факультет
Кафедра АТП
«Автоматизация технологических процессов»
Лабораторная работа
Тема: Изучение устройств перемещения и позиционирования
Работу выполнил:
студент гр. ЗАд-115
Кунин А.В.
Работу проверил:
проф. Коростелев В.Ф.
Владимир 2018
Лабораторная работа
Изучение устройств перемещения и позиционирования
Описание лабораторного стенда для исследования процессов литья с кристаллизацией под давлением
Программно-аппаратный комплекс предназначен для изучения, использования и исследования процесса литья с кристаллизацией под давлением. Комплекс (рис. 1.1) состоит:
- из пресса ПЛД-300 (1);
- вакуумной системы (2);
- информационно-измерительной системы (3);
- управляющей ЭВМ (IBM Pentium) (4);
- устройства связи с объектом управления (5), а также специальной экспериментальной технологической оснастки.
Пресс представляет собой гидравлическую машину для литья с кристаллизацией под давлением, с горизонтальным расположением основных силовых агрегатов.
Рис. 1.1. Структурная схема комплекса:
ДП – датчик положения; ДД – датчик давления; ДР – датчик разряжения;
ТП – термопары
Основные характеристики пресса ПЛД-300.
| Максимальное усилие пресса, развиваемое подвижной плитой........................................................................................ | 3 МН (300 тс) |
| Ход плиты пресса на открывание формы.................. | 250 мм |
| Скорость холостого хода плиты пресса.................... | 50 мм/с |
| Рабочее усилие гидроцилиндра для наложения давления | 0,3 МН |
| Число гидроцилиндров................................................ | 2 |
| Расположение гидроцилиндров................................. | соосное |
| Скорость холостого хода............................................. | 60 мм/с |
Пресс скомпонован как силовой агрегат, состоящий:
- из двух соосных встречно-расположенных гидроцилиндров 8 и 13 (рис. 1.2), развивающих каждый в отдельности усилие 0,3 МН и рассчитанных на перемещение пресс-плунжеров на 150 мм, для непосредственного наложения давления на кристаллизующийся металл;
- гидроцилиндра замыкания формы с мультипликатором давления и клапаном высокого давления 3, причем развиваемое гидроцилиндром 2 усилие ‑ 3 МН, ход ‑ 250 мм.
Рис. 1.2. Усиленный подвижный блок пресса
Гидроцилиндры 2, 4, 8 и 13 унифицированы по внутреннему диаметру, который составляет 200 мм. Ход поршня мультипликатора 2, как и ход силового штока гидроцилиндра 4 равен 250 мм, соотношение площадей поршня и штока мультипликатора 1:10, так что давление на поршень гидроцилиндра 4, удерживаемое клапаном 3, при давлении в гидросистеме равном 10 МПа, составляет 100 МПа. Для удержания этого давления гидроцилиндр 4 запрессован в неподвижную плиту 5.
Плита пресса 5 оснащена усиленной направляющей в виде блока, в состав которого наряду с плитой 5 входят также промежуточная плита 7, гильзы 10. Гильзы выполнены с высокой точностью (Н7) как по поверхности контакта с колоннами 11, так и по поверхности запрессовки (h7) в плиты 5 и 7. Необходимую жесткость блоку придает встроенный гидроцилиндр 8.
Из кинематической схемы, приведенной на рис. 1.3, видно, что установка представляет собой горизонтальный гидравлический пресс с мультипликацией усилия, прикладываемого к подвижной плите, которая состоит из двух неподвижных плит 19, 25 и одной подвижной 21, стянутых колоннами 20. Основной гидроцилиндр для перемещения подвижной плиты 21 и создания на отливку технологического давления запрессован в плите 25; он имеет правую и левую рабочие полости, причем в правой установлен рабочий поршень, шток которого через сферический подпятник связан с плитой 21, а в левой смонтирован поршень со штоком 31 гидромультипликатора. Для включения в работу мультипликатора предусмотрено перекрытие гидромагистрали с помощью специального клапана высокого давления 30.
В неподвижной плите 19 установлен вспомогательный гидроцилиндр 18 (гидроцилиндр прессования), поршень и шток 17 которого связаны с одной из формообразующих частей технологической оснастки или с выталкиванием отливки.
На гидравлической схеме пресса (рис. 1.4) использованы следующие обозначения:
ГЦНД – гидроцилиндр наложения давления;
ГЦВ – гидроцилиндр встроенный;
ГЦСЗ – гидроцилиндр силового замыкания;
ГЦМ – гидроцилиндр мультипликатора;
ГЦТ – гидроцилиндр телескопический;
КВД – клапан высокого давления;
ШТ – присоединительная арматура;
Р – распределитель;
Н – гидронасос;
Ф – фильтр;
ДРР – дроссель регулируемый;
КО – клапан обратный;
КП – клапан перепускной;
МН – манометр;
Б – бак сливной.
Для защиты гидросистемы от гидроударов при отключении КВД в соответствующей магистрали предусмотрены КО3 и ДРР3. Плавность отвода ГЦМ контролируется с помощью ДРР4.
Управление работой гидросистемы осуществляется с пульта ручного управления или в автоматическом режиме от системы управления.
Гидропривод (см. рис. 1.4) включает два нереверсивных нерегулируемых насоса с постоянной производительностью (Н1, Н2), два фильтра (Ф1, Ф2), два регулируемых дросселя (ДРР1, ДРР2) с обраными клапанами, два перепускных клапана (КП1 и КП2), два обратных клапана (КО1, КО2), три манометра (МН1, МН2, МНЗ) и бак Б1.
Рис. 1.3. Кинематическая схема пресса:
1, 2, 3, 4, 5, 6, 8, 9, 11, 15, 16, 32, 33 – трубопровод; 7- гидроцилиндр телескопический первый (ЦТ1); 10 – бак; 12 - короб средний; 13 – гидростанция; 4 – станина; 17, 22, 28 – шток; 18 - гидроцилиндр прессования; 19 - плита правая; 20 – колонна; 21 - плита подвижная; 23 - блок подвижный; 24 – цилиндр; 25 - плита опорная; 26 - гидроцилиндр телескопический второй (ЦТ2); 27- плита левая; 29 - гидроцилиндр силового замыкания, 30 – клапан высокого давления; 31 – мультипликатор
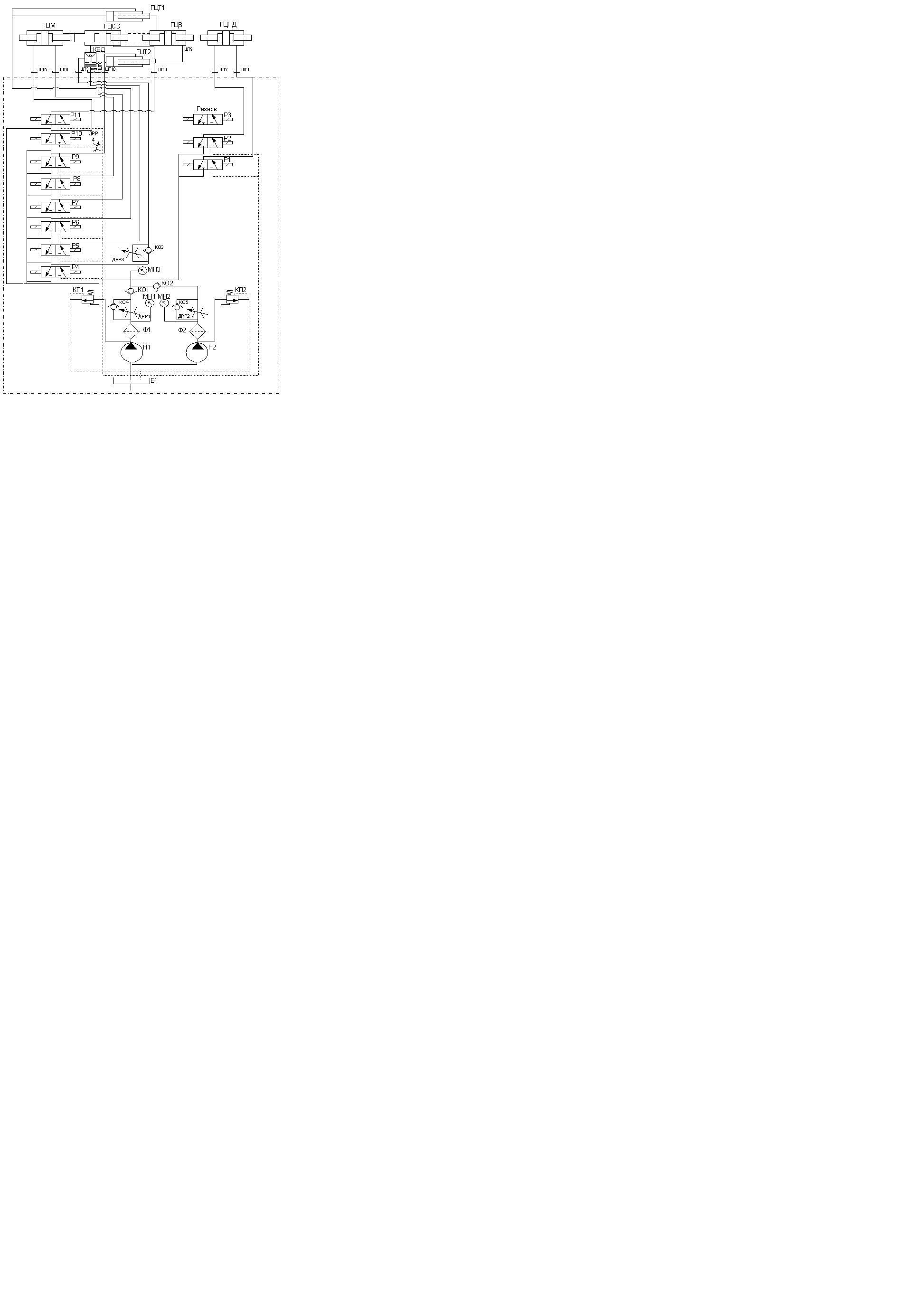
Рис. 1.4. Гидравлическая схема пресса
Электрогидропривод состоит из десяти электрогидравлических переключателей (Р1, Р2, Р4, Р5, Р6, Р7, Р8, Р9, Р10, Р11) и одного клапана высокого давления (КВД). Электрогидравлический дискретный переключатель (Р11) сообщается с полостью цилиндра силового замыкания при движении назад, на напорном трубопроводе стоит регулируемый дроссель (ДРРЗ).
Работа клапана высокого давления происходит следующим образом: при подаче давления с Р7 клапан закрыт и жидкость, находящаяся в штоковой полости цилиндра силового замыкания, оказывается заперта, при этом осуществляется возможность включить в работу мультипликатор давления (с помощью Р8 и Р10); при подаче давления с Р5 клапан высокого давления открывается, при этом можно двигать вперед подвижную плиту при помощи Р5, а не мультипликатором (Р8, Р10) либо сливать рабочую жидкость через Р5 и трубопровод в сливной бак.
Электрогидравлические переключатели (Р1, Р2, Р4, Р5, Р6, Р7, Р8, Р9, Р10, Р11) работают так: электромагнит включен, переключатель соединяет полость цилиндра со сливом; электромагнит выключен, полость цилиндра сообщается с напорной магистралью.