
Технические характеристики интерфейса RS-485








Управляющие вычислительные средства
1. Иерархия технических средств АСУТП
Иерархическая структура АСУ ТП включает в себя: 1) уровень технических средств САУ – управляющие устройства, к которым относятся: - первичные измерительные преобразователи (ПИП), предназначенные для преобразования контролируемого параметра в сигнал определенной формы, удобной для дальнейшей обработки и преобразований; - нормирующие преобразователи (НП), осуществляющие преобразование сигналов от ПИП в эквивалентные унифицированные сигналы; - локальные автоматические регуляторы; - исполнительные устройства в составе исполнительных механизмов, предназначенных для усиления мощности командного сигнала, полученного от регулятора, и регулирующих органов, представляющих собой технические средства изменения материального или энергетического потока, влияющего на регулируемую величину ТОУ; 2) уровень технических средств АСУ ТП – контроллеры и управляемые автоматические регуляторы; 3) уровень оперативного персонала АСУ ТП – автоматизированные рабочие места оператора-технолога и инженера, реализованные с использованием персональных компьютеров. Технические средства первого уровня размещаются непосредственно на объекте управления, второго и третьего уровня – в помещениях аппаратных и операторных.
2. Способы обработки и передачи информации и задачи, решаемые на уровне датчиков и исполнительных механизмов.
Датчики и исполнительные механизмы – устройства, предназначенные для преобразования технологических параметров в информационные показатели и обратно. Датчик – устройство для преобразования физической величины технологического процесса в стандартный электрический сигнал, передаваемый далее в контроллер. Исполнительный механизм – устройство для преобразования электрического сигнала, поступающего от контроллера, в то или иное физическое воздействие (например: изменение положения заслонки, открывание - закрывание клапана и т.д.). Существует огромное множество типов датчиков и исполнительных механизмов.
3. Способы обработки и передачи информации и задачи, решаемые на уровне УСО и контроллеров с жесткой логикой
контроллер (от англ. to control - управлять) – это некое устройство, выполняющее функцию связи между ЭВМ и каким-либо внешним или периферийным объектом. Применительно к АСУТП, контроллер – это электронное устройство с программным управлением и расширенными аппаратными возможностями измерения, управления и связи. Иначе говоря, контроллер представляет собой электронную схему, управляющую технологическим оборудованием, собирающую и анализирующую данные, на основе которых принимаются те или иные решения. Основное назначение контроллера – связь между уровнем датчиков и исполнительных механизмов и уровнем управляющих ЭВМ (серверов). Конструктивно контроллер представляет собой отдельное устройство, имеющее собственное питание. Контроллер может, как правило, функционировать автономно. При этом контроллер выполняется защищенным от пыли, влаги, электромагнитных излучений. Основные задачи, решаемые контроллером:
4. Способы обработки и передачи информации и задачи, решаемые на уровне ПЛК.
В качестве локальных программируемых логических контроллеров (ПЛК) в настоящее время применяется большое количество устройств. Блок согласования сигналов осуществляет электрическое согласование датчиков и исполнительных механизмов с входом блока преобразования сигналов. Блок преобразования сигналов преобразует аналоговый электрический сигнал, поступающий от датчиков, в цифровую форму и передает его центральному процессору, а также преобразует управляющие сигналы процессора в форму, необходимую для управления исполнительными механизмами. Процессор осуществляет управление всеми блоками контроллера, математическую обработку измеренных технологических параметров, организует хранение данных в блоке памяти, а также осуществляет передачу данных через интерфейс в локальную вычислительную сеть (ЛВС). В данном случае роль ЛВС играет промышленная локальная сеть.

5. Способы обработки и передачи информации и задачи, решаемые на уровне АРМ.
Автоматизированное рабочее место (АРМ) можно определить как совокупность информационно-программно-технических ресурсов, обеспечивающую конечному пользователю обработку данных и автоматизацию управленческих функций в конкретной предметной области. Создание автоматизированных рабочих мест предполагает, по основные операции по накоплению, хранению и переработке информации возлагаются на вычислительную технику, а экономист выполняет часть ручных операций и операций, требующих творческого подхода при подготовке управленческих решении. Эффективным режимом работы АРМ является его функционирование в рамках локальной вычислительной сети в качестве рабочей станции. Особенно целесообразен такой вариант, когда требуется распределять информационно-вычислительные ресурсы между несколькими пользователями. В наиболее сложных системах АРМ могут через специальное оборудование подключаться не только к ресурсам главной ЭВМ сети, но и к различным информационным службам и системам общего назначения. Информационное обеспечение АРМ ориентируется на конкретную привычную для пользователя, предметную область. Обработка документов должна предполагать такую структуризацию информации, которая позволяет осуществлять необходимое манипулирование различными структурами, удобную и быструю корректировку данных в массивах.
6. Архитектура и основные элементы модулей УСО
По конструктивному исполнению УСО делятся на: − Платы ввода‐вывода. Данные устройства представляют собой платы расширения, которые размещаются в едином корпусе с процессорной платой и устанавливаются в слоты системных шин. Платы ввода‐вывода применяются в системах управления сосредоточенными объектами; − Модули УСО. Данные устройства выполнены в отдельном корпусе. В системах управления модули УСО размещают как можно ближе к датчикам и исполнительным механизмам для уменьшения влияния помех в канале связи. Взаимодействие между модулями УСО и вычислительным устройством осуществляется через плату дискретного ввода‐вывода. Как правило, модули УСО одноканальные; − Модули удаленного ввода‐вывода (МУВВ). Данные устройства содержат микроконтроллер, что позволяет классифицировать их как интеллектуальные УСО. МУВВ выполняют задачи сбора данных с датчиков и управление исполнительными механизмами по инструкциям вычислительного устройства. Взаимосвязь между МУВВ и ВУ производится по стандартному каналу связи (полевой шине), например RS‐232, RS‐485, CAN и т.д. МУВВ применяются в распределенных системах управления. Конструктивно модули УСО выполнены в виде монолитных узлов стандартных типоразмеров. Модули УСО устанавливаются на DIN‐рейку или в специализированные платы, имеющие клеммные соединители для подвода внешних цепей. Такие платы называют монтажными панелями или оптопанелями.
7. Архитектура и основные элементы контроллеров с жёсткой логикой и ПИД-регуляторов
Раньше промышленные контроллеры создавались на основе релейных схем или дискретных элементов с "жесткой" логикой, и могли выполнять только определенный наперед алгоритм. Выполнять другую работу без существенной переделки способны только програмируемые логические контроллеры (ПЛК или PLC). Возможность их создания возникла около 30 лет назад с появлением микропроцессорных технологий. Архитектурой контроллера называют набор его основных компонентов и связей между ними. Типовой состав ПЛК включает центральный процессор, память, сетевые интерфейсы и устройства ввода-вывода .
ПИД-регулятор — это звено в контуре управления с обратной связью, используемое для поддержания заданного значения измеряемого параметра. ПИД-регулятор измеряет отклонение стабилизируемой величины от заданного значения (так называемой уставки) и генерирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально этому отклонению, второе пропорционально интегралу отклонения и третье пропорционально производной отклонения.
8.Архитектура и основные элементы ПЛК.
Архитектурой контроллера называют набор его основных компонентов и связей между ними. Типовой состав ПЛК включает центральный процессор, память, сетевые интерфейсы и устройства ввода-вывода .Иногда эта конфигурация дополняется устройством для программирования и пультом оператора, устройствами индикации, реже - принтером, клавиатурой, мышью или трекболом. 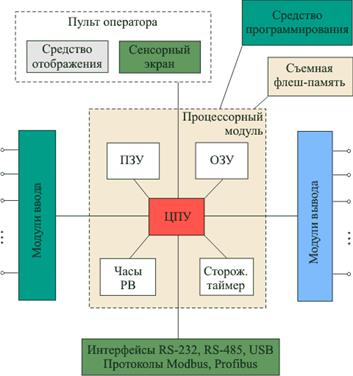
9. Методика анализа сигналов АСУТП и выбора микропроцессорных устройств
Программно-технический комплекс должен обеспечивать;
- прием и первичную обработку аналоговой и дискретной информации от традиционных датчиков аналоговых и дискретных сигналов;
- прием (обмен) и первичную обработку значений аналоговых параметров, дискретной информации и команд по цифровым линиям связи от интеллектуальных датчиков и исполнительных механизмов, а также от других ПТК, входящих в АСУ ТП ТЭС, и от АСДУ;
- прием (обмен) и первичную обработку информации и команд от приемопередающих устройств телемеханической связи, установленных на ТЭС;
- прием (при необходимости обмен) и первичную обработку информации и команд от автономных подсистем автоматического управления.
Должны быть предусмотрены автоматическая диагностика технических и программных средств ПТК и проверка достоверности входной информации с выдачей соответствующих сигналов предупредительной сигнализации и сообщений, а также возможность автоматического вывода из работы сигналов от неисправных датчиков, используемых в контурах управления (ТЗ, АР, ЛУ). При отказах модулей УСО (и после их устранения), выявленных алгоритмами самодиагностики, должны формироваться соответствующие признаки недостоверности (достоверности) входной информации.
выбор микропроцессорных устройств релейной защиты и автоматики ограничен ранее представленным списком европейских фирм. Поэтому во внимание следует принимать сложившуюся архитектуру систем контроля и управления электрической части. Ее основные элементы - серверы (также распространены иные термины: "базовая станция", "базовая система", "центральный координатор"), процессоры связи, низовые устройства (релейной защиты и автоматики, программируемые контроллеры), локальные вычислительные сети и операторские станции. В ряде случаев функции сервера, процессоров связи и операторских станций могут быть совмещены в одном компьютере. Для крупных, распределенных архитектур отдельные компоненты объединяются локальной вычислительной сетью
10. ПИД-регуляторы ТРМ-148 основные характеристики.
Напряжение питания: 90...245 В перем. тока
Частота напряжения питания: 47...63 Гц
Потребляемая мощность: не более 12 ВА
Количество входов для подключения датчиков: 8
Время опроса одного входа: не более 0,5 с
Количество каналов регулирования: 8
Количество выходных элементов: 8
Интерфейс связи с компьютером: RS-485 (протокол ОВЕН)
Напряжение встроенного источника питания активных датчиков: 24 ± 3 В
Максимальный ток встроенного источника питания: 180 мА
Тип и габаритные размеры корпуса: Щ4, 96х96х140 мм; Щ7, 144х169х50,5 мм
Степень защиты корпуса: IP54 со cтороны передней панели
11. Конфигурация ТРМ-148.
Конфигурирование ТРМ148
Для конфигурирования ТРМ148 предоставляются следующие средства:
кнопки на лицевой панели прибора;
программа "Конфигуратор ТРМ148";
программа быстрого старта EasyGo.
Для выбора стандартной модификации и ее настройки удобнее всего использовать программу EasyGo, которая имеет простой и понятный интерфейс. Отвечая на предлагаемые программой вопросы, можно легко произвести первую настройку прибора. Развернутая справочная система позволяет ознакомиться со структурой прибора ТРМ148, практически не обращаясь к руководству по эксплуатации. Пользователь может также создать нестандартную конфигурацию "с нуля" или путем доработки стандартной модификации, максимально близкой к решению поставленной задачи. Доработку стандартной модификации можно осуществить с помощью программы "Конфигуратор ТРМ148".Программа "Конфигуратор ТРМ148" имеет 3 уровня доступа, защищенных паролями: для наладчика системы (полный доступ ко всем параметрам); для технолога (настройка заводской модификации); для оператора (доступ к уставкам). В конфигураторе предусмотрены также следующие возможности: регистрация хода технологического процесса; дистанционный запуск/остановка регулирования.
12. Основные характеристики ПЛК ( Advantech , Овен и др.).
Разрешение 16-bit
Каналы шесть потенциальных, два униполярных
Типы входа термопара, мВ, В, мА
Входной диапазон ±15 мВ, ±50 мВ, ±100 мВ, ±500 мВ, ±1 В, ±2.5 В, ±20 мА
Типы термопары и температурные диапазоны:
J 0 ~ 760 °C
K 0 ~ 1370 °C
T -100 ~ 400 °C
E 0 ~ 1000 °C
R 500 ~ 1750 °C
S 500 ~ 1750 °C
B 500 ~ 1800 °C
Напряжение гальваноразвязки:3000 ВDC
Защита от повреждений и перенапряжения: выдерживает скачки напряжения до ±5 В
Частота отсчетов: 10 отсчетов/сек.
Входной импеданс: 20 МОм
Полоса пропускания :13.1 Гц при 50 Гц
Точность: ±0.05% или лучше
Дрейф нуля: ±3 x 10-6 В/°C
Дрейф диапазона: ±25 ppm/°C
Ослабление синфазного сигнала при 50/60 Гц: 92 дБ минимум
Напряжение питания: +10 ~ +30 ВDC (нерегулируемая)
Потребление мощности: 0.8 Вт
13. Основные характеристики модулей УСО ( Advantech , Овен и др.).
Модуль «УСО-01» применяется в качестве устройства связи с объектами и выполняет функции телемеханики (ТС, ТИИ, ТИТ, ТУ) в составе контроллера «МИР КТ-51» в распределенных системах телемеханики на объектах электроэнергетики и транспорта. Каналы ТС/ТИИ (активные каналы) обеспечивают работу с контактными или бесконтактными импульсными датчиками. Каналы ТС/ТИИ отвечают требованиям ГОСТ Р МЭК 870-3-93 и имеют основные параметры, аналогичные параметрам модулей «ТУ-01», «ТС-01», «ТИТ-01». Диапазон входных сигналов для каждого канала ТИТ определяется вариантом исполнения модуля. Разрядность АЦП – 12 битов. Номинальная ступень квантования для диапазона входного тока от 0 до +20 мА составляет 0,00586 мА, от 0 до +5 мА – 0,00146 мА..%0,25±Пределы допускаемой основной приведенной погрешности каналов ТИТ составляют .%0,1±С при рабочих условиях эксплуатации, составляют°Пределы допускаемой дополнительной приведенной погрешности каналов ТИТ, вызванной изменением температуры окружающего воздуха на каждые 10 Основные технические характеристики УСО. Напряжение питания (по заказу): - 110 В постоянного тока; - 220 В переменного (постоянного) тока. Потребляемая мощность: - не более 10 Вт. Входной ток (дискретных входов): - не более 4 мА. Цикл опроса дискретных сигналов 1мс; Цикл усреднения аналоговых сигналов 0,3с; Дискретность фиксации времени и даты события – 10 мс; Сопротивление изоляции – не менее 100 МОм; Прочность изоляции 2500В, 1мин.
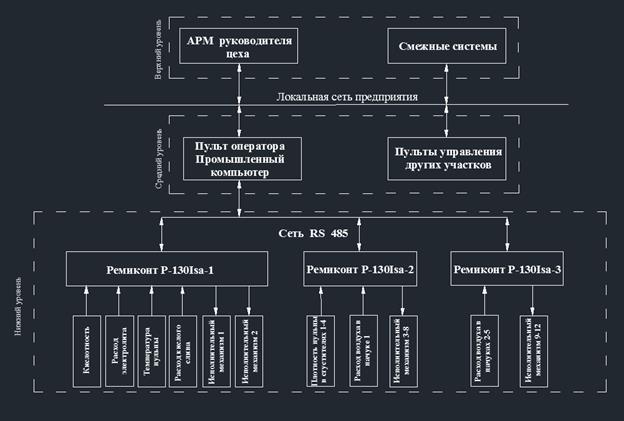
14. Основные характеристики Р-130 ISA
Контроллер предназначен для построения современных автоматизированных систем управления технологическими процессами (АСУ ТП) и позволяет выполнять оперативное управление с использованием персональных ЭВМ, автоматическое регулирование, автоматическое логикопрограммное управление, автоматическое управление с переменной структурой, защиту и блокировку, сигнализацию, регистрацию событий.
Технологическое программирование контроллера выполняется без программистов специалистами, знакомыми с традиционными средствами контроля и управления в АСУ ТП. Запрограммированная информация сохраняется при отключении питания с помощью встроееной батареи.
Контроллер имеет проектную компоновку, которая позволяет пользователю выбрать нужный набор модулей и блоков, согласно числу и виду входных – выходных сигналов.
В контроллер встроены развитые средства самодиагностики, сигнализации и индентификации неисправностей, в том числе при отказе комплектующих изделий, выходе сигналов за допустимые границы, сбое в ОЗУ, нарушении обмена по кольцевой сети и т.п. Для дистанционной сигнализации об отказе предусмотрены специальные дискретные выходы.
По интерфейсному входу-выходу контроллеры Р-130 могут объединяться в локальную управляющую сеть «Транзит» кольцевой конфигурации, которая с помощью блока «Шлюз БШ-1» может взаимодействовать с любым внешним абонентом (например, ЭВМ).
15. Конфигурации Р-130 ISA
Конфигурация контроллера устанавливается в соответствии с информацией, содержащейся в файле конфигурации контроллера. Все задачи хранятся в отдельных файлах, которые содержат информацию о конфигурации задачи и интерпретируемую программу. Каждая задача может иметь несколько файлов настроек (к примеру, в них могут быть отражены особенности, рецепты технологического процесса, использующего одну и ту же задачу). Каждая задача выполняется под управлением интерпретатора языка функциональных блоков в от- дельном потоке. Алгоритмы реализованы в виде динамически компонуемых библиотек (аналогично библиотекам Windows.DLL) и подключаются в зависимости от требований, предъявляемых задачами. Состав программного обеспечения контроллера: ¾ RTOS-32. ¾ Объектно-ориентированный интерфейс. ¾ Подсистема ввода/вывода. ¾ Интерпретатор языка функциональных блоков. ¾ Редактор языка функциональных блоков. ¾ Подсистема оперативного управления и настройки. ¾ Коммуникационная подсистема. ¾ Библиотеки интерпретатора. ¾ Библиотеки поддержки. ¾ Подсистема диагностики.
16. Особенности организации последовательной линии передачи информации.
Обмен данными с ВУ по последовательным линиям связи широко используется в микроЭВМ, особенно в тех случаях, когда не требуется высокой скорости обмена. Вместе с тем применение в них последовательных линий связи с ВУ обусловлено двумя важными причинами. Во-первых, последовательные линии связи просты по своей организации: два провода при симплексной и полудуплексной передаче и максимум четыре - при дуплексной. Во-вторых, в микроЭВМ используются внешние устройства, обмен с которыми необходимо вести в последовательном коде.
В современных микроЭВМ применяют, как правило, универсальные контроллеры для последовательного ВВ, обеспечивающие как синхронный, так и асинхронный режим обмена данными с ВУ.
17. Основные характеристики интерфейса RS485
RS -485 (англ. Recommended Standard 485), EIA -485 (англ. Electronic Industries Alliance-485) — стандарт физического уровня для асинхронного интерфейса.
Регламентирует электрические параметры полудуплексной многоточечной дифференциальной линии связи типа «общая шина».
Стандарт приобрел большую популярность и стал основой для создания целого семейства промышленных сетей широко используемых в промышленной автоматизации.
Стандарт RS-485 совместно разработан двумя ассоциациями: Ассоциацией электронной промышленности (EIA — Electronics Industries Association) и Ассоциацией промышленности средств связи (TIA — Telecommunications Industry Association).
Ранее EIA маркировала все свои стандарты префиксом «RS» (англ. Recommended Standard — Рекомендованный стандарт). Многие инженеры продолжают использовать это обозначение, однако EIA/TIA официально заменил «RS» на «EIA/TIA» с целью облегчить идентификацию происхождения своих стандартов.
Технические характеристики интерфейса RS-485
В стандарте RS-485 для передачи и приёма данных используется одна витая пара проводов, иногда сопровождаемая экранирующей оплеткой или общим проводом. Передача данных осуществляется с помощью дифференциальных сигналов. Разница напряжений между проводниками одной полярности означает логическую единицу, разница другой полярности — ноль.
Стандарт RS-485 оговаривает только электрические и временные характеристики интерфейса.
Стандарт RS-485 не оговаривает:
· параметры качества сигнала (допустимый уровень искажений, отражения в длинных линиях)
· типы соединителей и кабелей,
· гальваническую развязку линии связи,
· протокол обмена.
19. Роль и значение автоматизированного проектирования.
Автоматизация проектирования занимает особое место среди информационных технологий. Во-первых, автоматизация проектирования — синтетическая дисциплина, ее составными частями являются многие другие современные информационные технологии. Так, техническое обеспечение систем автоматизированного проектирования (САПР) основано на использовании вычислительных сетей и телекоммуникационных технологий, в САПР используются персональные компьютеры и рабочие станции. Математическое обеспечение САПР отличается богатством и разнообразием используемых методов вычислительной математики, статистики, математического программирования, дискретной математики, искусственного интеллекта. Во-вторых, знание основ автоматизации проектирования и умение работать со средствами САПР требуется практически любому инженеру-разработчику. Компьютерами насыщены проектные подразделения, конструкторские бюро и офисы. Работа конструктора за обычным кульманом, расчеты с помощью логарифмической линейки или оформление отчета на пишущей машинке стали анахронизмом. Предприятия, ведущие разработки без САПР или лишь с малой степенью их использования, оказываются неконкурентоспособными как вследствие больших материальных и временных затрат на проектирование, так и из-за невысокого качества проектов. К настоящему времени создано большое число программно-методических комплексов для САПР с различной степенью специализации и прикладной ориентацией. В результате автоматизация проектирования стала необходимой составной частью подготовки инженеров разных специальностей; инженер, не владеющий знаниями и не умеющий работать в САПР, не может считаться полноценным специалистом.
20. Проектирующие подсистемы средств АП
Проектирующие подсистемы– объектно-ориентированные подсистемы, реализующие определенный этап проектирования или группу связанных проектных задач. В зависимости от отношения к объекту проектирования делятся наобъектныеиинвариантные. Объектные(объектно-ориентированные) – выполняющие проектные процедуры и операции, непосредственно связанные с конкретным типом объектов проектирования. (Например: подсистема проектирования технологических систем; подсистема моделирования проектируемой конструкции и др.) Инвариантные(объектно-независимые) – выполняющие унифицированные проектные процедуры и операции, имеющие смысл для многих типов объектов проектирования. (Например: подсистема расчетов деталей машин; подсистема расчетов режимов резания; подсистема расчета технико-экономических показателей и др.).
Проектирующие подсистемы выполняют процедуры и операции получения новых данных. Они имеют объектную ориентацию и реализуют определенный этап проектирования или группу взаимосвязанных проектных задач. Примерами проектирующих подсистем являются: эскизное проектирование изделии, проектирование деталей (корпусных, валов, зубчатых колес и др.), проектирование технологических процессов сборки, механической обработки, других видов обработки.
21. Понятие блочно-иерархической структуры проектируемых объектов
Блочно-иерархический подход к проектированию использует идею распределения сложных объектов и соответственно средств их создания на иерархические уровни и аспекты, вводит понятие стиля проектирования (восходящее и нисходящее), устанавливает связь между параметрами соседних иерархических уровней. Ряд важных структурных принципов, используемых при разработке информационных систем и, прежде всего их программного обеспечения (ПО), выражен в объектно-ориентированном подходе к проектированию (ООП). Такой подход имеет следующие преимущества: 1) вносит в модели большую структурную определенность, распределяя представленные данные и процедуры между классами объектов; 2)сокращает объем спецификаций благодаря введению в описание иерархии объектов и отношений наследования между свойствами объектов разных уровней иерархии; 3) уменьшает вероятность искажения данных вследствие ошибочных действий за счет ограничения доступа к определенным категориям данных в объектах.
22. Обслуживающие подсистемы АП
Обслуживающие подсистемы– объектно-независимые подсистемы, реализующие функции общие для подсистем илиСАПРв целом, обеспечивают функционирование проектирующих подсистем, оформление, передачу и вывод данных, сопровождение программного обеспечения и т.п., Их совокупность называютсистемной средой (или оболочкой)САПР. Примеры обслуживающих подсистем: подсистема графического отображения объектов проектирования; обучающие подсистемы для освоения пользователями технологий, реализованных в САПР; подсистема документирования; подсистема прочностных расчетов; подсистема информационного поиска; подсистемы управления проектными данными (PDM) подсистемы графического ввода-вывода; Система управления базами данных(СУБД).
23. Привести пример блочно-иерархической структуры в представлении об объекте металлургической (пищевой) промышленности (?????не уверенна!!!)
24. Структура комплекса технических средств (КТС), предназначенного для систем автоматизированного управления.
комплекс технических средств также представляет собой сложную систему аппаратных и аппаратно-программных средств. Понятие «сложная система» здесь понимается как множество взаимосвязанных и взаимодействующих подсистем, выполняющих самостоятельные и общесистемные функции и имеющих собственные и общие цели. Поэтому представляется необходимым решать проблемы проектирования комплекса технических средств для АСУ ТП с единой методологической позиции — позициисистемного подхода, что в данном случае означает: использование концепций теории систем управления (общесистемные функции и цели, распределенность, многоуровневость и иерархичность структуры АСУ ТП); исследование технологических объектов управления и учет особенностей их эксплуатации с целью выбора ограничений при формировании типового состава функциональных задач КТС и состава индивидуальных задач данного объекта автоматизации; организацию внутренней структуры КТС (с учетом распределенности, иерархичности и многоуровневости АСУ ТП) на основе принципов типизации, унификации и агрегатирования; оптимизацию системотехнических, схемных, конструктивных и программных решений для упорядочения номенклатуры КТС (в том числе оптимизацию распределения функциональных задач, решаемых аппаратными и программными средствами); прогнозирование развития функционально-алгоритмической структуры АСУ ТП в процессе эксплуатации и эволюции технического обеспечения.