
1.1.)При результат моделирования представлен на рис.15








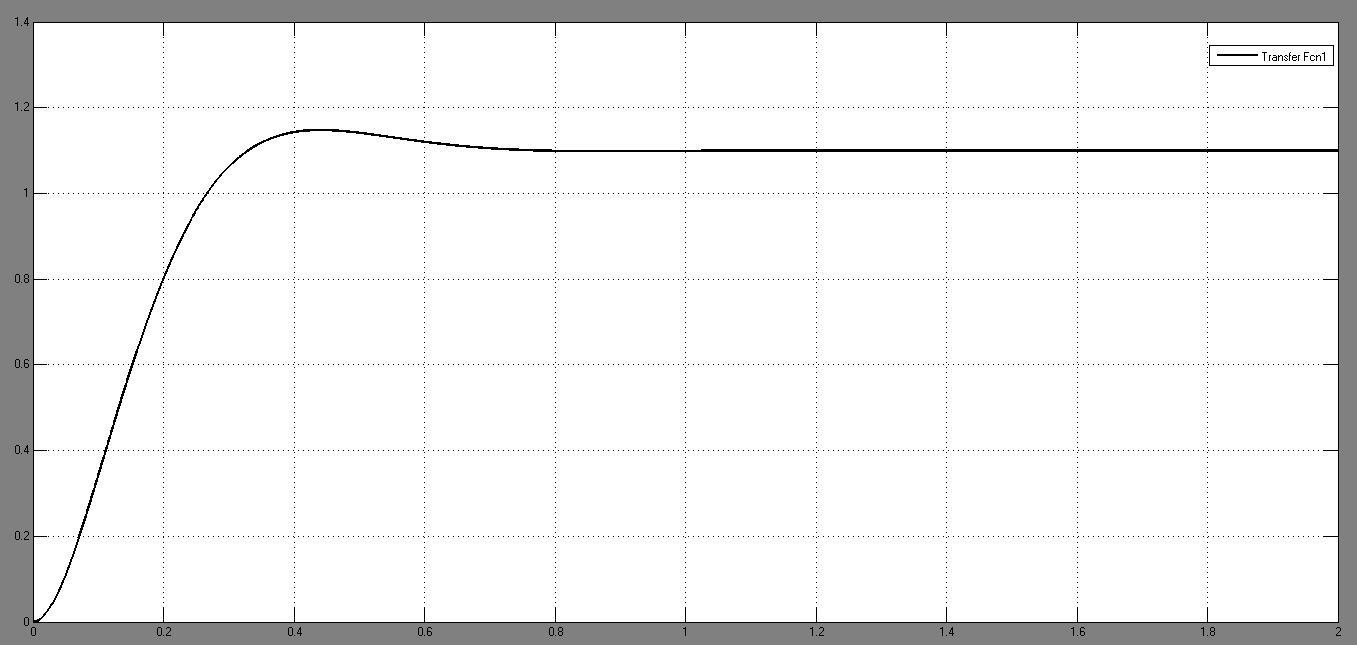
Рис.15. Результат моделирования при 
Время переходного процесса: 
Время регулирования: 
Перерегулирование: 
Колебательность:N=1
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 18 |
| БГТУ. 2 10100 . 11 . 000. ПЗ |
1.2.) При  результат моделирования представлен на рис.16.
результат моделирования представлен на рис.16.
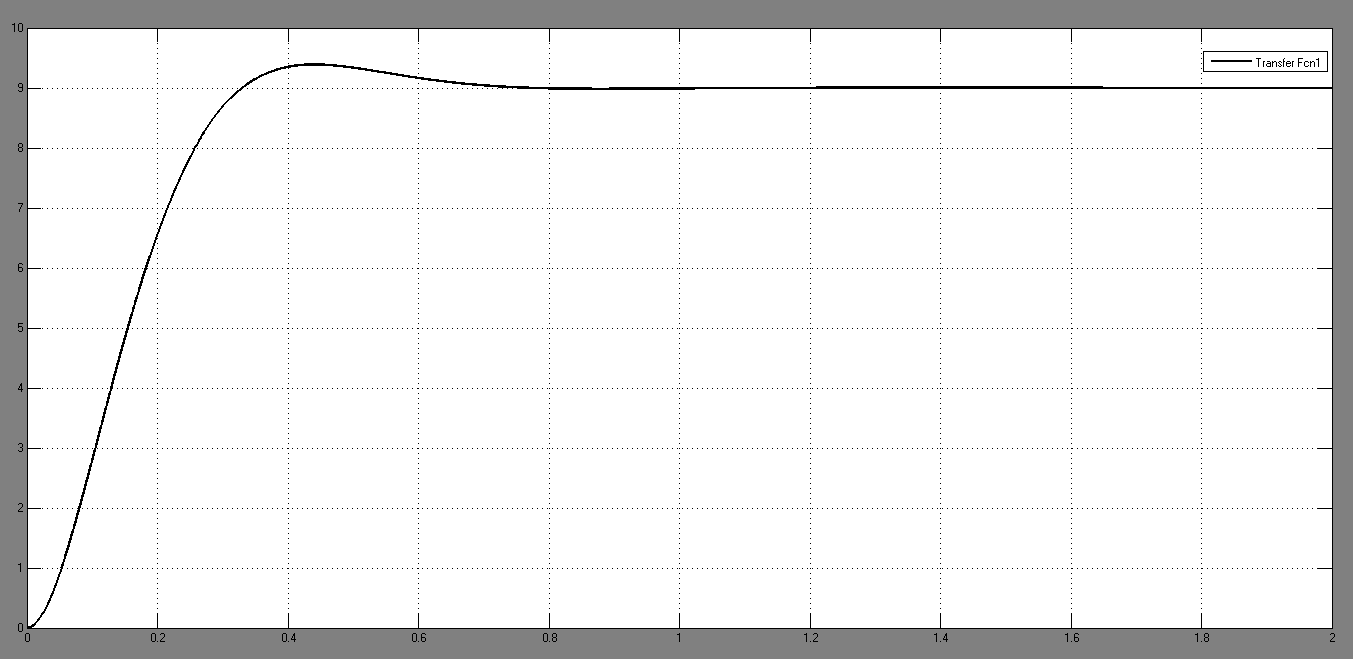
Рис.16. Результат моделирования при 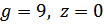
Время переходного процесса: 
Колебательность: N=1
Перерегулирование: 
2.)При действующих максимальных и минимальных возмущениях z для граничных значений g.
2.1.)При  результат моделирова ния представлен нарис.17.
результат моделирова ния представлен нарис.17.
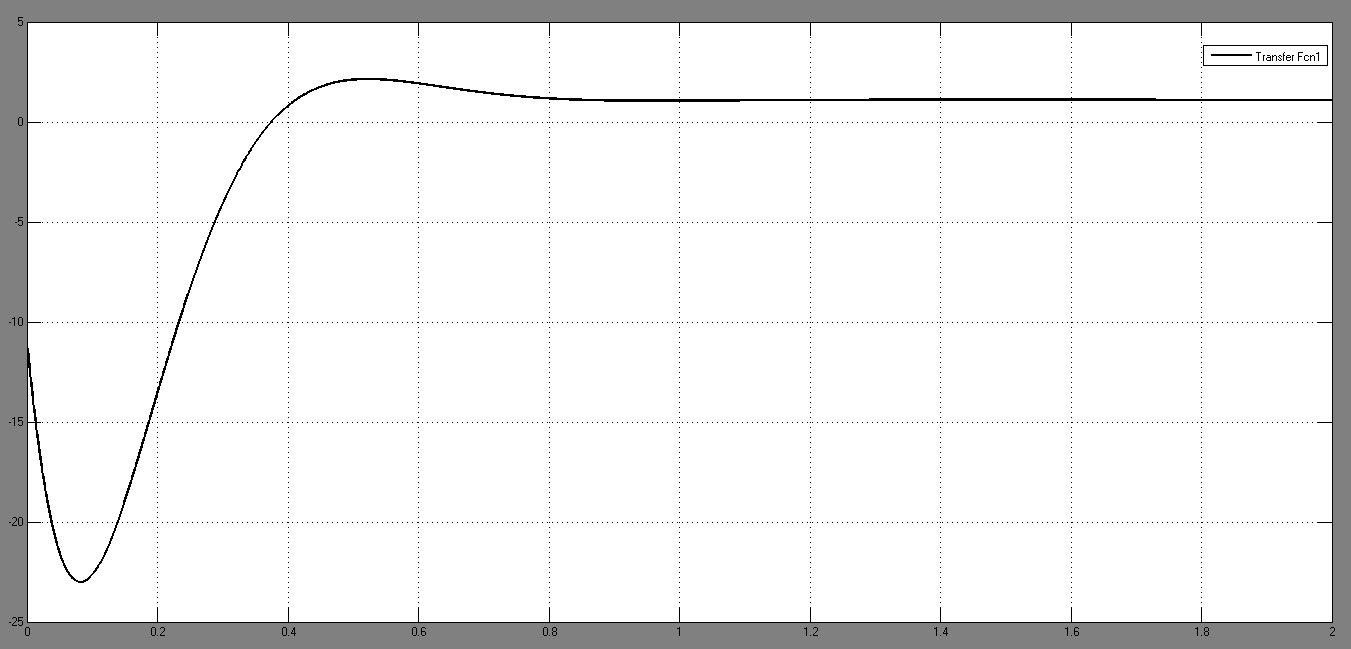
Рис.17. Результат моделирования при 
Время переходного процесса: 
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 19 |
| БГТУ. 2 10100 . 11 . 000. ПЗ |
Колебательность: N=1
Максимальная динамическая ошибка:

2.2.)При  результат моделирования представлен на рис.18.
результат моделирования представлен на рис.18.
Рис.18. Результат моделирования при 
Время переходного процесса: 
Колебательность: N=1
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 20 |
| БГТУ. 2 10100 . 11 . 000. ПЗ |
Максимальная динамическая ошибка:

Построим с помощью пакета MatLab логарифмические амплитудную частотную характеристику (ЛАЧХ) и фазово-частотную характеристику (ЛФЧХ) для разомкнутой скорректированной системы. Результаты моделирования представлены на рис.19.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 21 |
| БГТУ. 2 10100 . 11 . 000. ПЗ |
Рис.19. ЛАЧХ и ЛФЧХ для разомкнутой САУ, скорректированной на технический оптимум
Частота единичного усиления: 
Частота сопряжения: 
Запас по фазе: 
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 22 |
| БГТУ. 2 10100 . 11 . 000. ПЗ |
Заключение.
В курсовой работе было произведено исследование линейной САУ. Был рассчитан коэффициент усиления САУ, при котором суммарная статическая ошибка не превышала заданную при максимально возможном возмущающем воздействии. Также были построены статические характеристики замкнутой САУ и произведён анализ устойчивости. Система оказалась устойчивой, то есть после воздействия постоянной величиной или снятия воздействия система не оставалась в равновесном состоянии. Для настройки САУ на технический оптимум было разработано корректирующее устройство, которое обеспечило оптимальные показатели качества. Также САУ имеет большой запас по фазе и бесконечный запас по амплитуде.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 23 |
| БГТУ. 2 10100 . 11 . 000. ПЗ |
Список используемой литературы.
1. Теория автоматического управления: Учеб. для вузов / В. Н. Брюханов, М. Г. Косов, С. П. Протопопов, Ю. М. Соломенцев; Под ред Ю. М. Соломенцева. – М.: Высш. шк., 1999.
2. Теория автоматического управления: Учеб.для вузов. – Ч. 1. Теория линейных систем автоматического управления / Под ред. А. А. Воронова. – 2-е изд., перераб. и доп. – М.: Высш. шк., 1986.
3. Иванов Е. А., Сильченкова В. В. Исследование качества и синтез линейных систем автоматического управления: Учеб.пособие по курсу «Теория автоматического управления». – М.: МИЭТ, 1982.