
7 Монтаж устройства








Была произведена сборка элементов установки и монтаж устройства в технологический комплекс. Результаты отображены на рисунках 25-29.

Рисунок 25 – Рабочий орган устройства
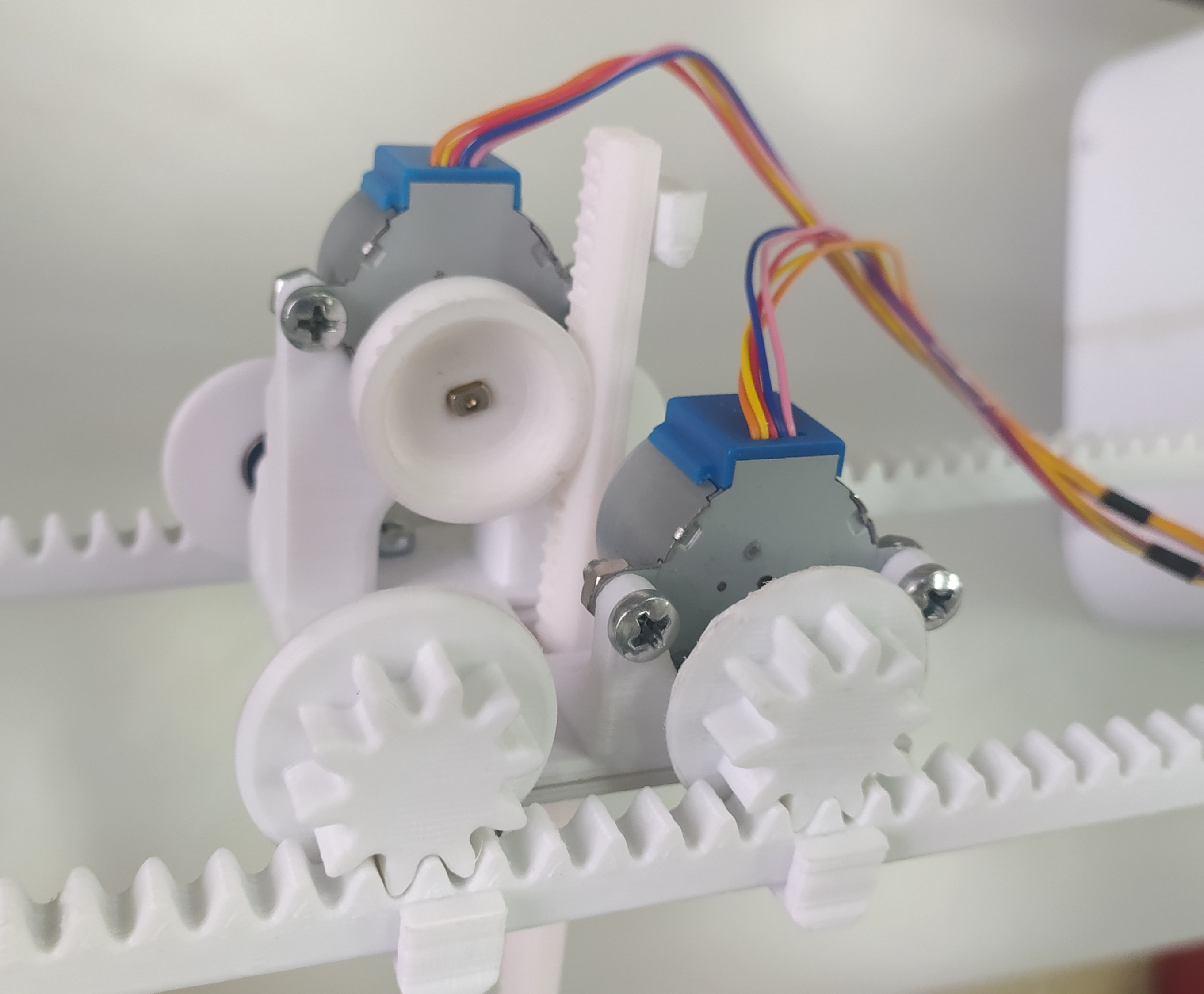
Рисунок 26 – Звено для перемещения захвата вдоль OX и OZ
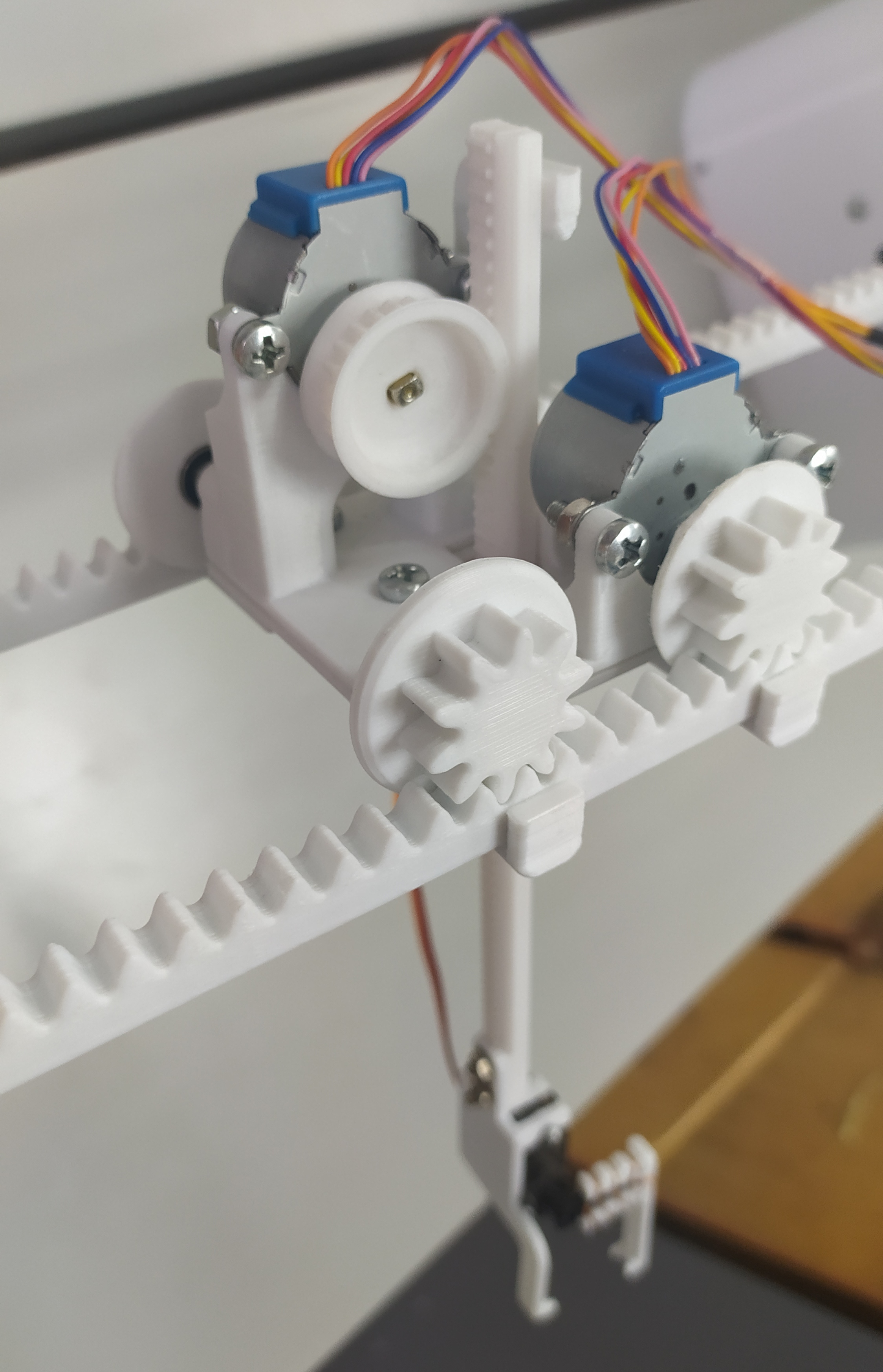
Рисунок 27 – Крепление рабочего органа к звену
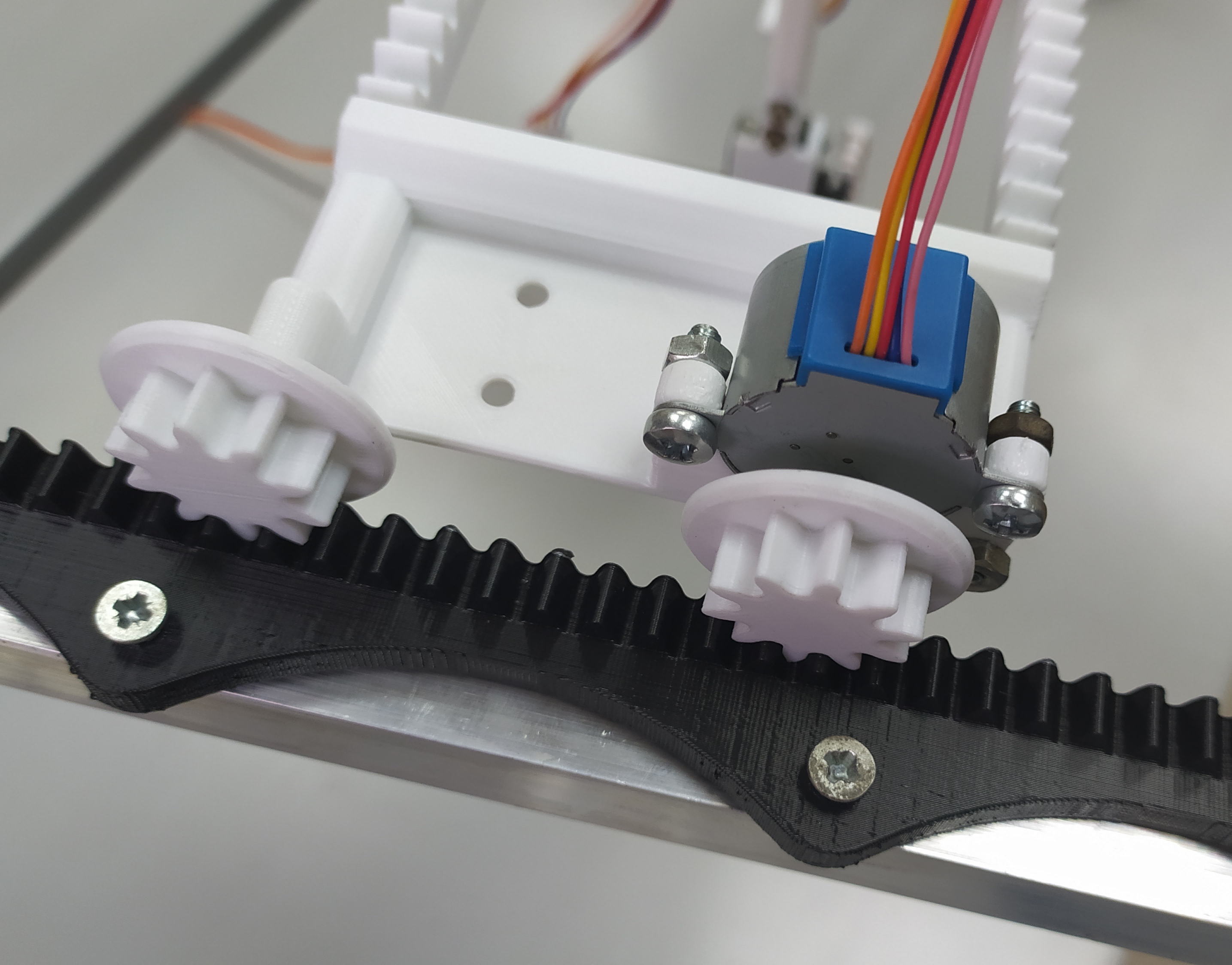
Рисунок 28 – Звено для перемещения захвата вдоль OY
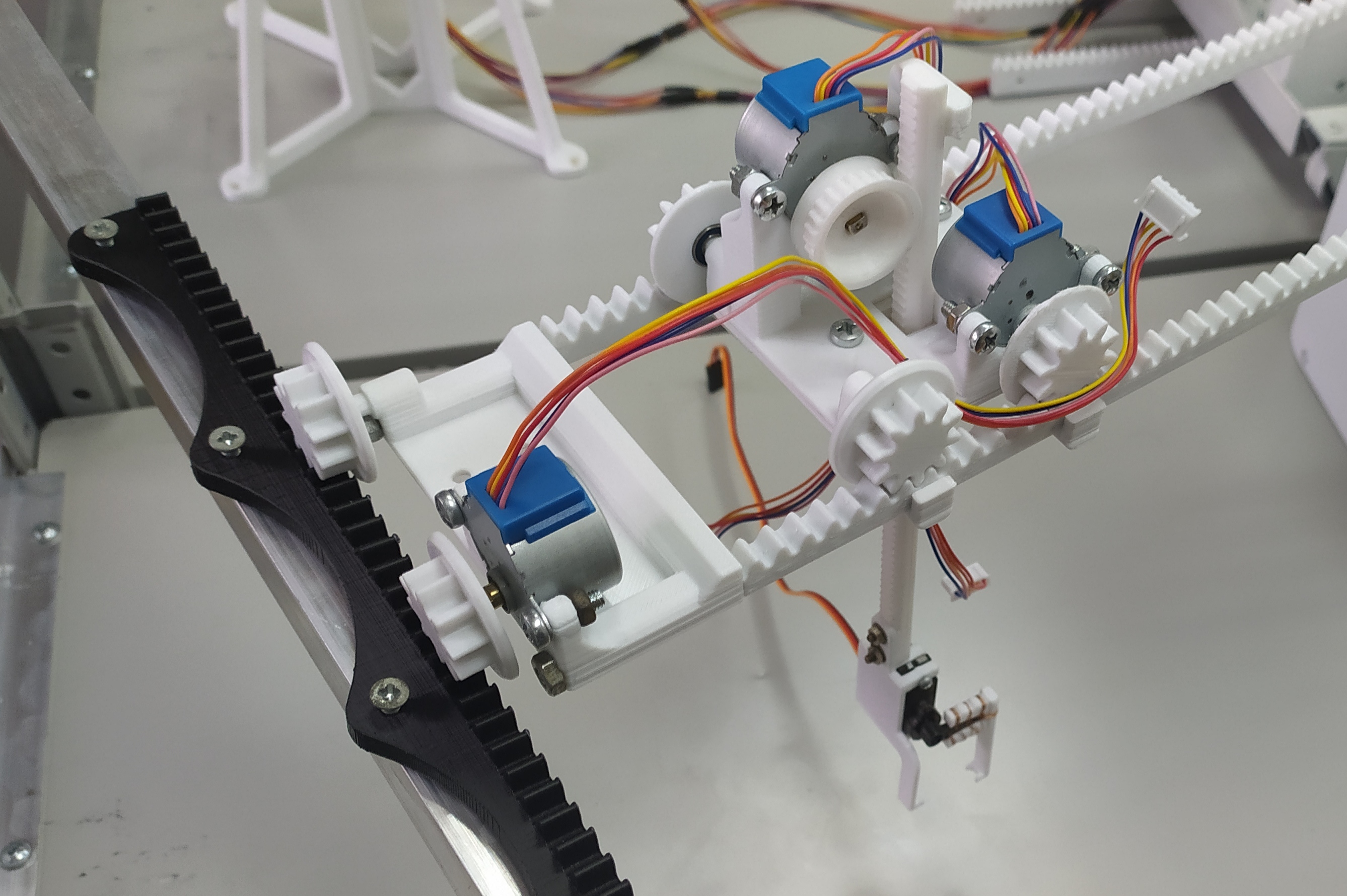
Рисунок 29 – Устройство для захвата и перемещения подложек в технологическом комплексе
При соединении деталей каких-либо проблем обнаружено не было. Рейки с крепежом были установлены на алюминиевый профиль, крепящейся к комплексу. Далее необходимо произвести монтаж проводов в соответствии с документацией, после чего нужно отработать программу перемещения подложек.
8 Составление программного алгоритма для устройства
Для написания программы нужно определить, каким способом происходит управление каждого устройства.
Микропереключатели представляют собой кнопку с металлическим рычагом. Когда кнопка нажата, то происходит замыкание двух контактов. Определение замыкания происходит при помощи функции digitalRead().
Управление сервоприводом будет происходить при помощи библиотеки <Servo.h>. Функция Servo1.attach() активирует работу сервопривода на выбранном контакте. Сервопривод будет устанавливать угол поворота в соответствии с поданным сигналом. Функция Servo1.write() позволяет установить нужный угол поворота. Функция Servo1.detach() отключает управление сервоприводом, если не будет происходить внешних воздействий на рабочий элемент сервопривода, то будет сохраняться последний установленный угол.
Управление шаговыми двигателями осуществляется при помощи 4 цифровых сигнальных проводов. Сигнал передается от контроллера к плате с драйвером, где происходит его обработка. Пример схемы подключения показан на рисунке 30.
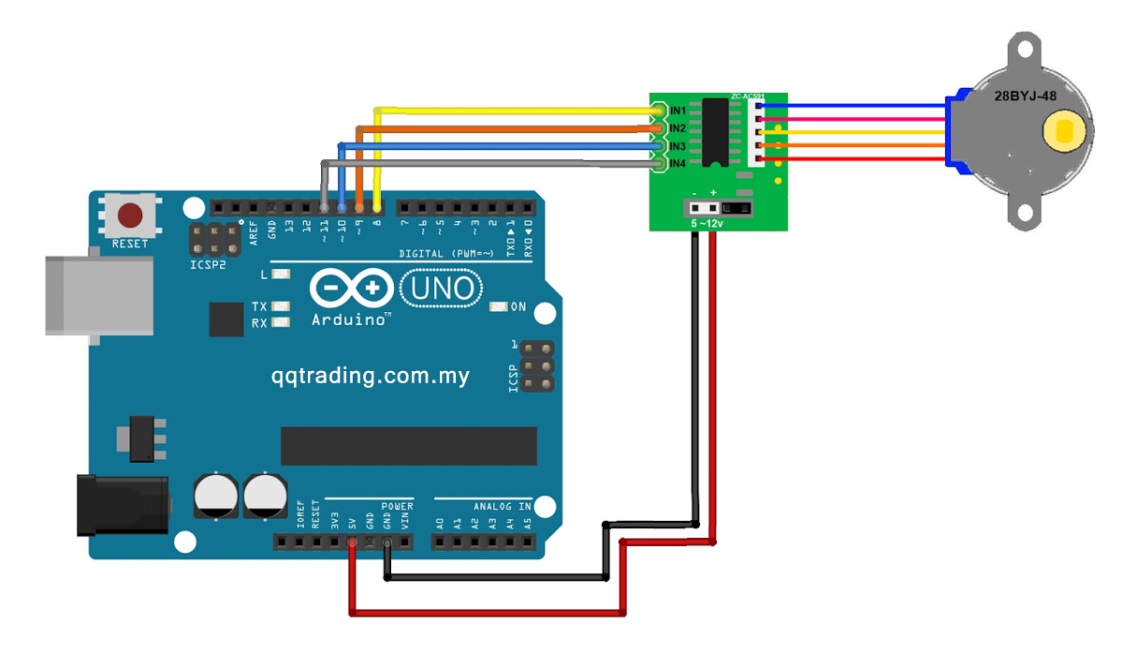
Рисунок 30 – Пример подключения шагового двигателя к контроллеру Arduino Uno
Этапы работы шагового двигателя показаны на рисунке 31.
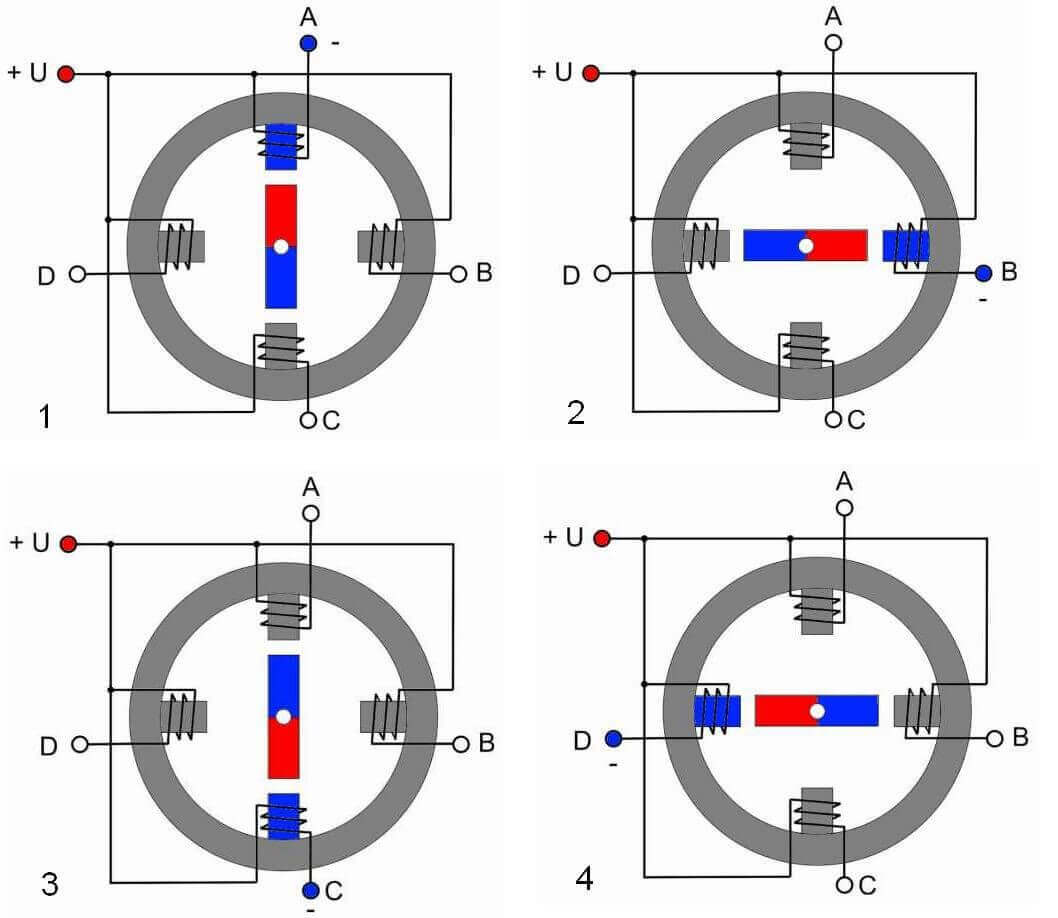
Рисунок 31 – Схема работы шагового двигателя
Как видно из рисунка, двигатель имеет четыре обмотки A, B, C, D. Управление обмотками осуществляется при помощи четырех сигналов. Высокий уровень напряжения на цифровом выводе контроллера означает, что по соответствующей обмотке идет ток, а низкий – отсутствие тока. Порядок включения обмоток двигателя для осуществления одного шага приведен в таблице 5.
Таблица 5 – Порядок подачи сигналов для шагового двигателя
| Фаза | A | B | C | D |
| 1 | 1 | 1 | 0 | 0 |
| 2 | 0 | 1 | 1 | 0 |
| 3 | 0 | 0 | 1 | 1 |
| 4 | 1 | 0 | 0 | 1 |
После каждой фазы подачи сигналов необходимо произвести задержку перед следующими сигналами на 5 мс. Это необходимо, чтобы ротор двигателя успел повернуться в нужную позицию. Пример программы для управления двигателем приведен на рисунке 32.
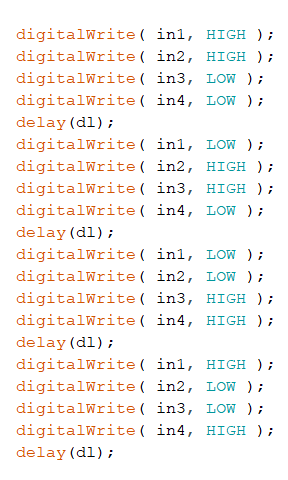
Рисунок 32 – Пример кода программы для осуществления одного полного поворота ротора двигателя
Функция digitaWrite() производит подачу сигнала в 5 В на указанном контакте. Функция delay() осуществляет остановку программы на dl = 5 мс.
Тестовая программа переноса подложек приведена в приложении В. Программа написана на С++ для контроллера Arduino Uno. Для простоты написания алгоритма были составлены некоторые функции, значение которых отображено в комментариях к программе.
ЗАКЛЮЧЕНИЕ
В результате проделанной работы было разработано и смонтировано устройство для обеспечения захвата и переноса подложек. Устройство позволяет автоматизированного производить обработку подложек в технологических зонах комплекса, за счет загруженного программного алгоритма для контроллера. Изменение технологического процесса происходит за счет перепрограммирования контроллера, обеспечивающего управление установкой и контроллера координирующего работу всего комплекса.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1 Декартовый робот ДРС-4К: [Электронный ресурс.] – Режим доступа: http://svarochnyeavtomaty.ru/production/svarochnye-roboty/roboty-s-pryamougolnoy-dekartovoy-sistemoy-koordinat/dekartovyy-robot-drs-4k/
2 Кичаев, Е. К. Теория механизмов и машин: Учебное пособие / Лашманов А. М., Кичаев П. Е., Довнар Л. А. – Самара: Самарс. Гос. техн. ун‑т, 2012. – 122 с.
3 3D-принтер Anycubic i3 Mega-S: [Электронный ресурс.] – Режим доступа: https://www.anycubic.com/collections/anycubic-mega-3d-printers/products/anycubic-i3-mega-s
4 Гулиа, Н. В. Детали машин / Гулиа Н. В., Клоков В. Г., Юрков С. А. – М.: Издательский центр «Академия», 2004. – 416 с.
5 Леонова, Л. М. Зубчатые передачи. Элементы расчета и конструирования: Методические указания / Леонова Л. М., Чигрик Н. Н., Татаурова В. П. – Омск: Изд-во ОмГТУ, 2005. – 45 с.
6 Скороходова, Е. А. Общетехнический справочник. – М.: Машиностроение, 1982. – 416 с.