3 Анализ аналогов разрабатываемого устройства








3.1 Анализ конструкции декартового робота ДРС-4К
3.1.1 Российская компания «НТ-сварка» позволяет под заказ приобрести декартового робота ДРС-4К. На рисунке 1 изображен внешний вид робота.

Рисунок 1 – Декартовый робот ДРС-4К
Описание и технические характеристики робота приведены на официальном сайте компании[1].
3.1.2 Описание робота ДРС-4К.
Декартовый робот ДРС-4К – с четырьмя осями передвижения и двумя пневматическими прижимами, который работает по декартовой системе координат.
Робот ДРС-4К предназначен для основной технологической операции дуговой сварки различных металлоконструкций по сложному контуру. Робот можно использовать в различных отраслях производства: автомобильной промышленности, судостроении, машиностроении и турбостроении. Обычно робот используют в комплексе с различными приспособлениями: сварочными манипуляторами, вращателями, поворотными столами и т.д.
Робот ДРС-4К состоит из основной установки для сварки с четырьмя осями передвижения, источника питания для MIG-MAG и TIG сварки. На рисунке 2 изображена 3D-модель робота ДРС-4К.
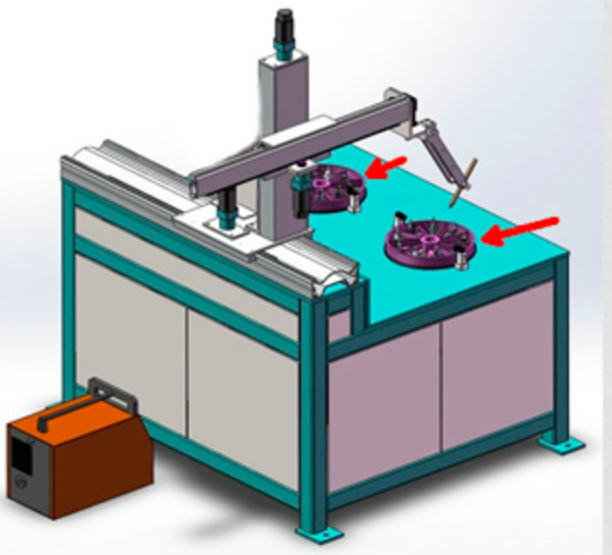
Рисунок 2 – Модель робота ДРС-4К
Исполнительный механизм манипулятора горелки представляет собой открытую кинематическую цепь, звенья которой последовательно соединены между собой сочленениями поступательного типа. Три сочленения, которые расположены первыми, в исполнительном механизме манипулятора выполняют транспортное передвижение, они обеспечивают вывод горелки в заданное место, а оставшиеся отвечают за правильную ориентацию сварочной горелки. На рисунках 3-5 показаны сочленения кинематической цепи, обеспечивающие транспортное передвижение. На рисунке 6 показано звено, отвечающие за ориентацию горелки.

Рисунок 3 – Кинематическая пара, отвечающая за перемещение вдоль горизонтальной оси координат

Рисунок 4 – Кинематическая пара, отвечающая за перемещение вдоль вертикальной оси координат

Рисунок 5 – Кинематическая пара, отвечающая за перемещение вдоль горизонтальной оси координат

Рисунок 6 – Кинематическое звено, отвечающие за ориентацию горелки
3.1.3 Технические характеристики робота ДРС-4К приведены в таблице 4.
Таблица 4 – Технические характеристики робота ДРС-4К
| Диапазон перемещения горелки вправо-влево | 2000 мм |
| Диапазон перемещения горелки вверх-вниз | 400 мм |
| Диапазон перемещения горелки вперед назад | 1000 мм |
| Скорость сварки | 100~1000 мм/мин |
| ЧПУ | Япония OMRON PLC |
| Давление воздуха | 0,4 - 0,6 МПа |
| Угол вращения сварочной головки | 360° |
| Сварочный ток | 240 А |
| Сварочная проволока | Диаметр 0,8 - 1,2 мм |
| Напряжение питания | 380В 3 фазы 50 Гц |
3.1.4 Сравнительный анализ робота ДРС-4К и разрабатываемого изделия.
Основная задача ДРС-4К – это автоматизация сварочных работ. Рабочий орган робота представлен в виде сварочной горелки. Задача нашего изделие – осуществление перемещения подложек по технологическим зонам. Рабочий орган нашего устройства будет представлен в виде захвата.
Манипуляционная система ДРС-4К состоит из кинематических звеньев с соединением поступательного типа и звеньев, обеспечивающих поворот горелки. По определению, кинематическая цепь – связанная система звеньев, образующая кинематические пары. Открытая цепь – та, в которой имеются звенья, входящие в одну кинематическую пару. Кинематической парой называется подвижное соединение двух звеньев. Звенья пары могут соприкасаться по поверхностям, линиями и точкам[2].
Как видно из рисунков 3-5, передвижение механизмов осуществляется за счет зубчатой дорожки и зубчатых колес. В нашей установке будут применяться схожие прицепы осуществления перемещения рабочего органа, но для перемещения в горизонтальной плоскости будут использоваться по две зубчатой дорожке на одну ось вместо одной. Это обуславливается несущей конструкцией механизма. Звенья установки будут передвигаться по двум зубчатым рейкам на четырех зубчатых колесах.
Из рисунка 6 видно, что за ориентацию горелки у ДРС-4К отвечают приводы, осуществляющие вращение рабочего органа. В разрабатываемом устройстве рабочий орган будет всегда ориентирован одной стороной. Это обуславливается возможностью соблюдения ориентации подложек в местах захвата в технологическом комплексе.
Можно заметить, что рабочая зона нашего устройства будет меньше рабочей зоны ДРС-4К. В разрабатываемой установке объем, по которому будет передвигаться рабочий орган устройства, не будет превышать1×0,8×0,5 м, а рабочая зона ДРС-4К составляет 2×1×0,4 м. Рабочая зона нашего робота обусловлена габаритными размерами комплекса, тогда как рабочая зона ДРС-4К зависит от размеров свариваемых деталей. Чем больше объем рабочей зоны ДРС-4К, тем более универсальным он становится, так как на нем можно будет сваривать большее количество деталей. Разрабатываемое нами изделие, ориентировано только для работы с технологическим комплексом, что не требует универсальности.
В роботе ДРС-4К применяются более мощные электродвигатели, также используются более прочные материалы для несущей конструкции. Это обусловлено массой рабочего органа и манипуляционной системой.
Таким образом, можно выделить особенности в конструкции робота, которые могут послужить образцом при конструировании установки по перемещению подложек. Манипуляционная система разрабатываемого устройства будет представлена кинематической цепью из трех звеньев. Движение механизмов будет осуществляться за счет зубчатых реек и колес.
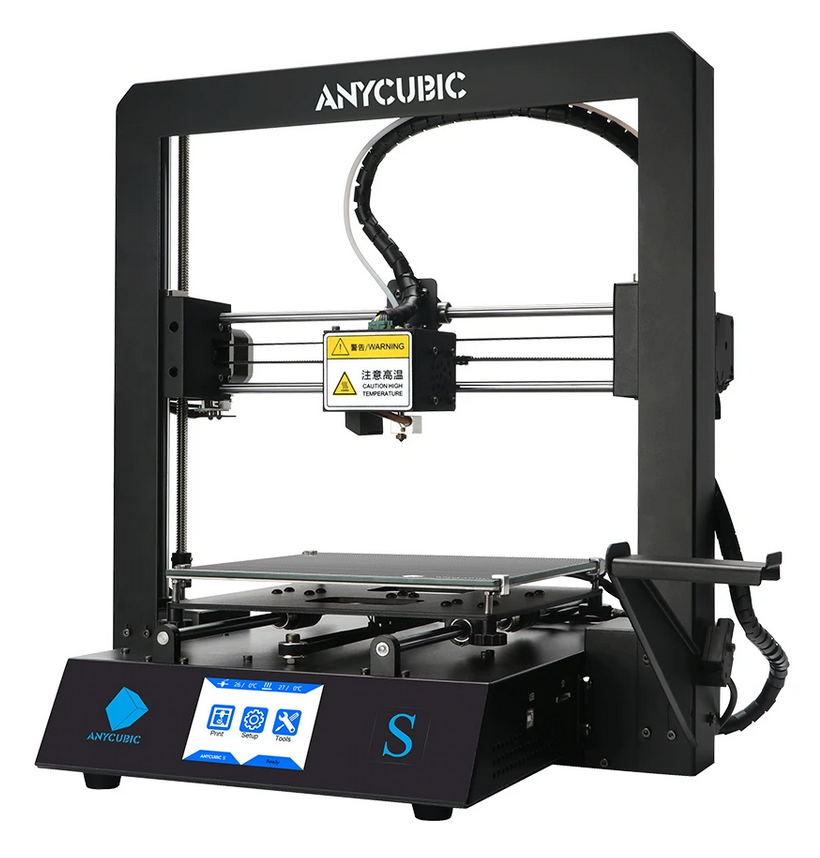
3.2 Анализ конструкции 3D-принтера Anycubic i3 Mega-S
3.2.1 Данное устройство было выбрано для анализа, так как на нем будет производиться печать деталей, что дает возможность более подробно проанализировать работу его манипуляционной системы. 3D-принтер Anycubic i3 Mega-S изображен на рисунке 7. Технические характеристики принтера приведены в таблице 2 раздела 2.2.1.6.