
Внешнее ориентирование модели








Процесс внешнего ориентирования модели, выполняемый на анали- тической фотограмметрической системе, включает измерение координат опорных точек X M, Y M, Z M в системе координат фотограмметрической модели O MX MY MZ M и определение значений элементов внешнего ори- ентирования модели и элементов внешнего ориентирования снимков стереопары.
Для измерения координат точек в СК фотограмметрической мо- дели на аналитической фотограмметрической системе строится фото- грамметрическая модель. Построение фотограмметрической модели осуществляется следующим образом. При вращении штурвалов X, Y, Z компьютер вырабатывает значения координат точек фотограмметриче- ской модели X M, Y M, Z M. По значениям координат X M, Y M, Z M и значениям элементов внешнего ориентирования снимков стереопары в СК фото- грамметрической модели X S, Y S, Z S, w, a, κ для каждого снимка стерео- пары вычисляются координаты х, ó изображений точки модели. Эти вычисления производятся по формулам
x = x o
- f x* ;
 z*
z*
y = y o
- f y* , (9.4.21)
 z*
z*
æ x* ö
æ X - X ö
ç ÷ ç M S ÷
в которых ç y* ÷ = AT çY M - Y S ÷.
ç z* ÷
ç Z M - Z S ÷
è ø è ø
Затем по одним из формул (9.4.13), (9.4.19) или (9.4.20) и по фор- мулам (9.4.8) по значениям параметров калибровки измерительных систем и значениям параметров внутреннего ориентирования снимков для каждого из снимков стереопары вычисляются значения координат xc, yc изображений точки модели в системах координат измерительных систем. Компьютер выдаёт команду на перемещение кареток снимков и в результате измерительные марки наводят на изображения на снимках точки фотограмметрической модели, координаты которой X M, Y M, Z M были заданы с помощью штурвалов X, Y, Z.
Для измерения координат X M, Y M, Z M опорной точки в СК фото- грамметрической модели оператор с помощью штурвалов X, Y, Z на- водит стереоскопически марку на опорную точку на стереомодели. При нажатии на ножную педаль осуществляется фиксация координат X M, Y M, Z M измеренной опорной точки. По измеренным значениям коор- динат опорных точек в СК фотограмметрической модели и значениям координат этих точек в СК объекта производят определение элементов внешнего ориентирования модели и элементов внешнего ориентирова- ния снимков стереопары.
Для облегчения работы оператора в некоторых аналитических фотограмметрических системах после измерения трёх опорных точек производят определение значений элементов внешнего ориентирования модели и элементов внешнего ориентирования снимков стереопары, а на остальные опорные точки осуществляется автоматическое стереоскопи- ческое наведение измерительной марки. Это производится следующим образом. По координатам опорной точки X, Y, Z в СК объекта и элементам внешнего ориентирования снимков стереопары в этой же системе коор- динат по формулам (9.4.21) вычисляются координаты х, ó изображений опорных точек для каждого из снимков стереопары в системах коорди- нат снимков. Затем также, как и при построении фотограмметрической модели по значениям параметров калибровки измерительных систем и параметрам внутреннего ориентирования снимков вычисляются координаты xc, yc изображений опорных точек в системах координат измерительных систем и компьютер выдаёт команды на перемещение
кареток снимков в положение, при котором измерительные марки наво- дятся на изображение опорных точек на снимках стереопары. Оператор с помощью штурвалов X, Y, Z только уточняет наведение марки на изо- бражение опорной точки на стереомодели и фиксирует её координаты X M, Y M, Z M в системе координат модели.
После измерений каждой опорной точки вычисление значений
элементов внешнего ориентирования модели и элементов внешнего ориентирования снимков в СК объекта повторяется.
измерение координат и высот точек объекта
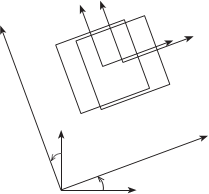
Для измерения координат и высот точек объекта на аФС стро- ится внешне ориентированная модель.
 y1 y2
y1 y2
Y*
x1 x2
Особенностью построе- ния внешне ориентированной модели является то, что при вращении штурвалов X, Y, Z
компьютер вырабатывает зна-
|
O1 O2
2
P1
Y
κM
κM
O X
рис. 9.6
чения координат точек объекта в вспомогательной системе ко- ординат объекта OX*Y*Z*, ось Z*
X* и начало системы координат которой совпадают с осью Z и началом СК объекта OXYZ, а оси
X*, Y* развёрнуты относительно осей Х и Y на угол разворота κM системы координат фотограм- метрической модели O MX MY MZ M
относительно системы координат объекта OXYZ (рис. 9.6).
По значениям координат точек объекта X*, Y*, Z* в вспомогательной СК OX*Y*Z* вычисляют координаты этих точек в СК объекта OXYZ по формулам:
æ X ö
æ X * ö
æ cos k
-sin k
0 öæ X * ö
ç ÷ ç ÷ ç
M M ÷ç ÷
Y = Ak
çY * ÷ =
sin kM
cos kM
0 çY * ÷
(9.4.22)
|
ç ÷ ç ÷ ç
÷ç ÷
ç Z ÷ Z * ç
0 0 1 ÷ Z *
или
è ø è ø è
øè ø
X = cos kM X * - sin kMY *;
Y = sin kM X * + cos kMY *;
Z = Z *.
(9.4.23)
Затем так же, как и при построении фотограмметрической модели по значениям координат X, Y, Z точки объекта, значениям элементов внешнего ориентирования снимков в СК объекта и значениям параме- тров внутреннего ориентирования снимков и калибровки измеритель- ных систем вычисляют координаты точек xc, yc снимков в СК измери- тельных систем, и компьютер выдаёт команды на перемещение кареток в положение, при котором измерительные марки наведены на изображение точки объекта на снимках. Для измерения координат и высот точек объекта оператор штурвалами X, Y, Z наводит стереоскопически изме- рительную марку на точки стереомодели и фиксирует их координаты в СК объекта OXYZ. вспомогательная система координат OX*Y*Z* введена для того, чтобы при вращении штурвалов X, Y измерительная марка на стереомодели перемещалась приблизительно параллельно осям х и ó систем координат снимков.
На аналитических фотограмметрических системах можно созда- вать регулярные цифровые модели рельефа (ЦМР) в виде сетки квадра- тов на местности и ЦМР в виде параллельных профилей.
При создании ЦМР в виде с е т к и к в а д р а т о в в компьютер вводятся значения координат X и Y всех точек ЦМР в СК объекта OXYZ. При определении высот точек ЦМР для каждой из точек по её координа- там X, Y и координате Z, заданной штурвалом, вычисляются координаты изображений соответствующих точек на снимках в системах координат измерительных систем и выдаются команды на перемещение кареток. Оператор одним из штурвалов наводит стереоскопически измеритель- ную марку на точку стереоскопической модели по высоте и фиксирует значение координаты Z точки цифровой модели.
При создании ЦМР в виде п а р а л л е л ь н ы х п р о ф и л е й в компьютер вводятся координаты Xн, Yн и Xк, Yк начальных и конечных точек профилей и дирекционный угол aп осей профилей. Затем произ- водится определение координат и высот точек каждого из профилей. С этой целью компьютер вычисляет координаты X и Y точек профиля
по расстояниям d от начальной точки профиля до определяемой точки. вычисление координат X, Y точек профиля производится по формулам:
X = X í + d cos aï;
Y = Yí + d sin aï.
(9.4.24)
Оператор одним из штурвалов задаёт скорость изменения величи- ны расстояния d, а другим — высоту точки модели Z. По координатам X, Y, Z точек профиля вычисляются координаты их изображений в СК измерительной системы и выдаются команды на перемещение каре- ток. Наблюдая стереоскопическую модель, оператор совмещает марку с поверхностью объекта. Фиксация координат точек профиля X, Y, Z производится автоматически через заданные интервалы расстояний между точками профиля или через заданные интервалы высот точек профиля. Так же можно строить профили между любыми точками объекта.
в некоторых аналитических фотограмметрических системах, на- пример, аФС «Стереоанаграф» построение фотограмметрической и внешне ориентированной моделей производится иначе, чем изложено выше. в этих системах штурвалы X, Y выдают команды на перемещение одного из снимков стереопары по осям xc, yc измерительной системы это- го снимка, а штурвал Z задаёт высоту точки объекта в СК объекта (или фотограмметрической модели). По значениям координат xc, yc снимка в СК измерительной системы, поступающим в компьютер с датчиков координат, значениям параметров калибровки измерительной системы и значениям элементов внутреннего ориентирование снимка вычисля- ются координаты х, ó точки снимка в СК снимка, а затем по значениям элементов внешнего ориентирования снимка и значению координаты Z точки объекта, задаваемой штурвалом Z, вычисляются координаты X, Y точки объекта по формулам
X = X
+ (Z - Z
) X ¢ ;
Y = Y
+ (Z - Z
) Y ¢ , (9.4.25)
æ X ¢ö
S S Z ¢
æ x - x o ö
S S Z ¢
в которых çY ¢ ÷ = A ç y - y o ÷.
ç ÷ ç ÷
ç Z ¢ ÷ ç -f ÷
è ø è ø
Затем по формулам (9.4.21) по значениям координат X, Y, Z объек- та и значениям элементов внешнего ориентирования второго снимка стереопары вычисляют значения координат х, ó изображения точки на втором снимке в СК снимка, а по значениям параметров измерительной системы, и элементам внутреннего ориентирования снимка вычисля- ются координаты изображения этой точки в системе координат измери- тельной системы, и компьютер выдаёт команды на перемещение каретки
снимка. Оператор для измерения координат точек модели с помощью штурвалов X, Y, Z наводит измерительную марку на точку стереомодели и производит фиксацию координат X, Y, Z точек модели.
Недостатком этого метода построения модели является невоз- можность его использования для построения регулярных цифровых моделей рельефа и автоматического наведения измерительной марки на точки стереомодели по заданным значениям координат этих точек в системе координат объекта. Другим недостатком является то, что при изменении значения высоты точки объекта Z изменяются значения её координат X и Y.
§9.5. Применение и перспективы развития
методов автоматизации измерений в цифровых фотограмметрических системах
Практически на всех этапах обработки снимков применяются ав- томатические методы измерений координат точек снимков.
в н у т р е н н е е о р и е н т и р о в а н и е. На этом этапе чаще все- го применяются площадные методы отождествления при измерениях координат координатных меток. Отождествление выполняется между фрагментом исходного снимка с изображением координатной метки и специально созданным эталонным изображением этой метки. Кроме того, для измерения координат координатных меток могут использо- ваться автоматические методы монокулярных измерений.
в з а и м н о е о р и е н т и р о в а н и е. Для автоматического изме- рения координат точек, необходимых для взаимного ориентирования пары снимков, используют как площадные методы отождествления, так и методы, основанные на выделении элементов изображения. Кроме того, здесь широко применяется пирамида изображений.
И з ме р е н ие св я з у ю щ и х т о че к. Отождествление общих точек на нескольких снимках осуществляется по тем же алгоритмам, что и при измерениях точек для взаимного ориентирования.
в не ш не е о р ие н т и р о в а н и е. автоматизация измерений координат изображений опорных точек возможна, если эти точки мар- кированы на объекте. в этом случае можно применять те же алгоритмы, что и на этапе внутреннего ориентирования снимка при измерении координатных меток.
С о з д а н и е ц и ф р о в о й м о д е л и п о в е р х н о с т и (Ц М П). Для создания плотной цифровой модели поверхности объекта чаще всего используется полуглобальный метод отождествления соответ- ствующих точек.
С о з да н и е ц и ф р о в о й м о д е л и р е л ь е фа (Ц М Р). Здесь могут применяться все описанные выше методы отождествления одноименных точек на снимках, включая редактирование ЦМП путем удаления из нее точек, принадлежащих искусственным сооружениям и растительности.
Уд е р ж а н и е и з м е р и т е л ь н о й ма р к и на п о в е р х н о - с т и м о д е л и. Измерительная марка автоматически остается совме- щенной по глубине с поверхностью модели при любых перемещениях марки в плане путем непрерывной корреляции одноименных точек стереопары вокруг марки.
П е р спе к т и в н ые н а п р а в ле н и я р а з в и т и я ц иф р о -
в ы х ф о т о г р а м м е т р и ч е с к и х с и с т е м.
1. Разработка новых и совершенствование существующих аэро-, космических и наземных съемочных систем, что потребует разра- ботки новых алгоритмов обработки таких изображений. Например, появление сегодня первых аэросъемочных систем, позволяющих выполнять съемку одновременно в надир и с наклоном (Leica RC-30 Olique), потребовало доработки алгоритмов фототриангуляции и по- строения трехмерных моделей городов с реальными текстурами стен зданий. аналогичная ситуация и с появлением съемок с беспилотных летательных аппаратов и т.д.
2. Разработка новых и совершенствование существующих алгорит- мов автоматической обработки снимков. Здесь можно выделить пять групп алгоритмов:
1) отождествления отдельных точек на смежных снимках, для которых наиболее перспективным является путь разработки новых детекторов особых точек и их дескрипторов;
2) построения плотных моделей поверхности. Наиболее вероятный путь развития этих алгоритмов — совершенствование полуглобаль- ного метода отождествления одноименных точек путем перехода от минимизации стоимости отождествления в пространстве снимков к минимизации стоимости отождествления в пространстве объекта, что позволит повысить точность и надежность построения ЦМП;
3)
|
построения действительного ортофотоплана на основе плот- ной ЦМП;
4) автоматической обработки плотной цифровой модели поверхно- сти с целью создания ЦМР, выделения домов, дорог и других векторных объектов;
5) распознавания образов с целью автоматической векторизации объектов по снимкам.
3. Развитие компьютерной техники и интернета. Это направление безусловно влияет на развитие ЦФС и прежде всего с точки зрения ор- ганизации параллельных вычислений и облачных технологий. Конечно сегодня при относительно невысокой скорости передачи данных по сети интернет применение облачных технологий возможно только для небольших проектов, в основном для решения задач наземной фото- грамметрии, где количество снимков небольшое, а каждый снимок занимает мегабайты, в отличии от аэро- и космических снимков, где каждый снимок занимает гигабайты. Другое направление развития ЦФС может быть связано с интеграцией последних с геопорталами для обмена данными.
 |
список рекомендуемой литературы
1. Визильтер Ю.В., Желтов С.Ю., Бондаренко А.В., Ососков М.В., Моржин А.В. Обработка и анализ изображений в задачах машинного зрения. ‒М.: Физмат- книга, 2010. ‒671 с.
2. Инструкция по фотограмметрическим работам при создании цифро- вых топографических карт и планов. ‒М.: ЦНИИГаиК, 2002. ‒100 с.
3. Лобанов А.Н. Фотограмметрия. ‒М.: Недра, 1984. ‒552 с.
4. Лобанов А.Н., Журкин И.Г. и др. автоматизация фотограмметрических процессов. ‒М.: Недра, 1980. ‒000 с.
5. Середович В.А., Комиссаров А.В., Комиссаров Д.В., Широкова Т.А. На- земное лазерное сканирование. –Новосибирск: СГГа, 2009. ‒175 с.
6. Геодезия, картография, геоинформатика, кадастр: энциклопедия в 2-х т.
/ Под общ. ред. а.в. Бородко и в.П. Савиных. ‒М.: Геодезкартиздат, 2008.
‒496 с., 464 с.
7. Шовенгерд Р.А. Дистанционное зондирование. Модели и методы об- работки изображений. ‒М.: Техносфера, 2013. ‒564 с.
8. Chibunichev A.G,. Serafin Lopez Cuervo. Fotogrametria no cartografica. Madrid, Universidad Politecnica de Madrid, 2005, pp. 203.
9. George Vosselman, Hans-Gerd Maas. Airborne and Terrestrial Laser Scanning. Whittles Publishing. 2011, pp. 318.
10. Manual of Photogrammetry. Sixth Edition. Ed. J. Chris McGlone. ASPRS, 2013. pp. 1372.
11. Thomas Luhman, Stuart Robson, Stephen Kyle, Jan Boehm. Close-Range Photogrammetry and 3D Imaging. De Grueter, Berlin/Boston, 2014, pp. 684.
оглаВлеНие
в в е дение......................................................................... 3
Г лав а 1. теория одиночного кадрового снимка............................................ 7
§1.1. Основные свойства кадрового снимка......................................................... 7
§1.2. Системы координат кадровой съемочной камеры (снимка).
Элементы внутреннего ориентирования кадровой
съемочной камеры (снимка)......................................................................... 11
§1.3. Системы координат объекта. Элементы внешнего
ориентирования съемочной камеры.......................................................... 13
§1.4. Формулы связи координат соответственных точек
снимка и местности......................................................................................... 17
§1.5. Формулы связи координат соответственных точек
местности и горизонтального снимка....................................................... 20
§1.6. влияние погрешности определения высот точек местности на точность определения их плановых
координат по одиночному снимку............................................................. 21
§1.7. Формулы связи координат соответственных точек горизонтального и наклонного снимков, полученных из одного центра проекции (формулы трансформирования
координат точек снимка).............................................................................. 22
§1.8. Определение элементов внешнего ориентирования снимка
по опорным точкам (обратная фотограмметрическая засечка)........ 24
§1.9. Наблюдение и измерение цифровых изображений............................... 28
§1.10. внутреннее ориентирование снимка........................................................ 34
§1.11. Фотограмметрические сканеры................................................................ 38
Г лав а 2. теория пары кадровых снимков...................................................... 41
§2.1. Основы стереоскопического зрения........................................................... 41
§2.2. Методы стереоскопического наблюдения и измерения
цифровых снимков........................................................................................... 46
§2.3. Способы измерения координат и параллаксов
соответственных точек на стереопаре снимков..................................... 49
§2.4. Формулы связи координат точек местности и их изображений
на стереопаре снимков (прямая фотограмметрическая засечка)...... 51
§2.5. Формулы связи координат точек местности
и координат их изображений на стереопаре снимков
идеального случая съемки............................................................................ 54
§2.6. Определение координат точек местности
по стереопаре снимков методом двойной обратной фотограмметрической засечки 55
§2.7. Условие, уравнения и элементы взаимного
ориентирования снимков............................................................................... 56
§2.8. Определение элементов взаимного ориентирования
пары снимков.................................................................................................... 58
§2.9. Построение фотограмметрической модели.............................................. 60
§2.10. внешнее ориентирование модели.
Элементы внешнего ориентирования модели 61
§2.11. Определение элементов внешнего ориентирования
модели по опорным точкам......................................................................... 62
§2.12. Определение элементов внешнего ориентирования
снимков стереопары...................................................................................... 63
§2.13. Точность определения координат точек объекта
по стереопаре плановых снимков............................................................. 64
Г лав а 3. Пространственная фототриангуляция.......................................... 67
§3.1. Назначение и классификация методов
фототриангуляции........................................................................................... 67
§3.2. Маршрутная фототриангуляция методом продолжения...................... 68
§3.3. Блочная фототриангуляция
по методу независимых маршрутов........................................................... 73
§3.4. Построение и уравнивание маршрутной и блочной фототриангуляции по методу независимых моделей 75
§3.5. Построение и уравнивание маршрутной
и блочной фототриангуляции по методу связок...................................... 78
§3.6. Построение и уравнивание маршрутной и блочной сетей фототриангуляции
по методу связок с самокалибровкой......................................................... 83
§3.7. Технология построения сетей фототриангуляции.................................. 85
Г лав а 4. Цифровое трансформирование кадровых снимков................. 93
§4.1. Назначение и области применения
цифрового трансформирования снимков.................................................. 93
§4.2. Методы цифрового трансформирования снимков.................................. 94
§4.3. Цифровое ортофототрансформирование снимка................................... 98
§4.4. Цифровое ортофототрансформирование снимков
с изображением искусственных сооружений........................................ 104
§4.5. Цифровое ортофототрансформирование снимков
с использованием цифровой модели поверхности............................... 108
§4.6. Создание цифровых фотопланов.............................................................. 110
§4.7. Оценка точности цифровых трансформированных
фотоснимков и фотопланов........................................................................ 113
Г лав а 5. автоматизация фотограмметрических измерений................. 115
§5.1. Корреляционный метод измерений
соответственных точек на паре снимков................................................ 116
§5.2. Измерение соответственных точек
по методу наименьших квадратов............................................................ 120
§5.3. Проблемы автоматического стереоотождествления
одноименных точек....................................................................................... 122
§5.4. Отождествление соответственных точек по методу наименьших квадратов с учетом геометрических
и фотометрических искажений снимков.................................................. 125
§5.5. Отождествление соответственных точек по методу
наименьших квадратов в пространстве объекта.................................. 128
§5.6. вычисление градиента изображения....................................................... 130
§5.7. Методы, позволяющие сузить область поиска
соответственных точек на смежных снимках........................................ 134
§5.8. Построение цифровой модели поверхности.......................................... 141
§5.9. Методы автоматического отождествления соответственных точек, основанные
на выделении элементов изображения.................................................... 143
§5.10. автоматическое построение плотного облака точек по паре снимков на основе полуглобального метода
отождествления соответственных точек. 149
§5.11. автоматизированные методы
монокулярных измерений.......................................................................... 153
Г лав а 6. теория и методы фотограмметрической обработки одиночных и стереопар аэрокосмических
сканерных изображений.................................................................. 157
§6.1. Классификация аэрокосмических систем
дистанционного зондирования.................................................................. 157
§6.2. Принцип формирования изображения с помощью оптико-электронной сканерной съемочной системы.
Системы координат сканера...................................................................... 159
§6.3. Принцип формирования изображения с помощью оптико-механической сканерной съемочной системы.
Системы координат сканера...................................................................... 164
§6.4. Методы получения стереопар сканерных изображений................... 165
§6.5. Математическая модель сканерных изображений............................. 168
§6.6. Определение координат точек местности
по одиночному сканерному изображению............................................ 174
§6.7. Определение координат точек объекта
по стереопаре сканерных снимков.......................................................... 175
§6.8. Принцип действия лазерно-локационных
съемочных систем......................................................................................... 179
§6.9. Принцип формирования радиолокационных
изображений. Системы координат 181
§6.10. Методы получения стереопар
радиолокационных изображений 183
§6.11. Определение координат точек объекта
по одиночному радиолокационному изображению......................... 184
§6.12. Определение координат точек объекта
по стереопаре радиолокационных изображений 186
§6.13. Радиолокационная интерферометрия................................................... 187
§6.14. Определение координат точек местности для случая,
когда измеряются ЭвО сенсора во время съемки............................... 190
§6.15. Фототриангуляция по сканерным изображениям............................. 192
§6.16. Ортофототрансформирование изображений,
полученных с помощью сканерных съемочных систем.................. 196
Г лав а 7. Наземная фотограмметрия.............................................................. 199
§7.1. Области применения наземной фотограмметрии................................ 199
§7.2. Съемочные камеры, применяемые в наземной фотограмметрии..... 202