
§9.3. Цифровые фотограмметрические системы








На рис. 9.2 показана обобщенная принципиальная схема цифро- вого фотограмметрического комплекса, состоящего из трех основных частей: устройств ввода, цифровой фотограмметрической системы и устройств вывода.
Ус т р о й с т в а в в о д а предназначены для получения и ввода цифровых изображений в цифровую фотограмметрическую систему. в качестве таких устройств применяются цифровые камеры, основанные на линейках или матрицах ПЗС (приборы зарядной связи), съемочные системы дистанционного зондирования (ДЗ) или сканеры, предназна- ченные для преобразования аналоговых фотоизображений в цифровую форму.
Ц и ф р о в а я ф о т о г р а м м е т ри ч е ск а я сис т е м а предна- значена для обработки стереопар снимков и состоит из компьютера с соответствующим программным обеспечением, системы стереоскопи- ческого наблюдения снимков и датчиков координат.
Ус т р о й с т в а в ы в о д а предназначены для хранения и вывода результатов фотограмметрической обработки стереопар снимков. в качестве таких устройств могут служить: 1) геоинформационные си- стемы (ГИС), в которых выполняется окончательное редактирование, хранение и использование цифровых карт и планов; 2) принтер для
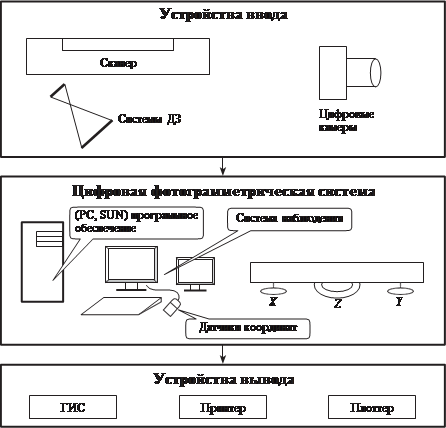
рис. 9.2
вывода на печать алфавитно-цифровой информации (результатов урав- нивания фототриангуляции, каталогов координат и т.д.) и графической информации в виде рабочих фрагментов карт и планов; 3) плоттер для получения твердой копии карт и планов.
Некоторые устройства ввода были рассмотрены в предыдущих главах и в курсе «аэрокосмические съемки». Здесь рассмотрим более подробно цифровую фотограмметрическую систему, как основной эле- мент цифрового фотограмметрического комплекса.
в качестве компьютера используют персональные (РС) или ком- пьютеры типа SUN. Программное обеспечение позволяет решать все фотограмметрические задачи по цифровым изображениям (внутреннее
ориентирование снимков, взаимное ориентирование пары снимков, по- строение модели, внешнее ориентирование модели, прямая и обратная засечки, фототриангуляция, трансформирование снимков, создание ортофотопланов, создание цифровых моделей местности и рельефа). Отличительной особенностью программного обеспечения цифровой системы является возможность автоматизировать процесс измерений координат точек снимков на всех этапах обработки стереопары.
С и с т е м а н а б л ю д е н и я состоит из одного или двух мони- торов. Один предназначен для стереоскопического наблюдения стере- опары снимков, а второй – для управления процессами фотограмме- трической обработки снимков. в случае одного монитора все задачи решаются на нем.
Существует четыре метода стереоскопического наблюдения снимков, применяемых в цифровых фотограмметрических системах: бинокулярный метод, анаглифический метод, поляроидный метод, ме- тод затворных (активных) очков. Суть этих методов была рассмотрена в главе 2.
Д а т ч и к и к о о р д и н а т предназначены для задания координат точек местности X, Y, Z (как и в аналитической системе). в качестве таких датчиков могут быть использованы штурвалы, клавиатура компьютера, мышь, трекбол и т.д.
в табл. 9.1 в качестве примера приведены некоторые характери- стики цифровых фотограмметрических систем.