
§8.7. создание 3D-моделей объекта по материалам наземного лазерного сканирования








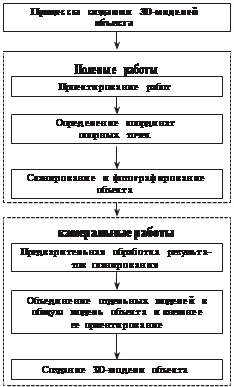 На рис. 8.23 показаны ос- новные процессы технологии создания трехмерных моделей объекта с помощью наземного лазерного сканирования.
На рис. 8.23 показаны ос- новные процессы технологии создания трехмерных моделей объекта с помощью наземного лазерного сканирования.
П о л ев ы е р а б о т ы на- чинаются с проектирования лазерной съемки. При проек- тировании выбираются точки стояния сканера таким образом, чтобы покрыть съемкой весь объект, при этом должно быть перекрытие между отдельными сканами с тем чтобы в послед- ствии можно было объединить отдельные сканы в единую мо- дель объекта
Максимальное расстояние от сканера до объекта D можно вычислить по формуле, вытека- ющей из рис. 8.24:
рис. 8.23
D = D ,
tg(dj)
D
 (8.7.1) Δ
(8.7.1) Δ
где ∆ — точность, с которой следует создать модель объекта;
рис. 8.24
dφ — угловая точность лазерного сканера (техническая характеристика прибора).
Кроме того, вычисляют угловое разрешение ∆φ сканирования для отображения на модели мелких деталей объекта:
arctg(Dj) = d ,
D
(8.7.2)
где d — минимальный размер деталей объекта, которые должны быть отображены на модели.
Проект съемки корректируется на местности, учитывая реальные условия (расположение объекта, видимости и т.д.). Если реальное от- стояние сканера от объекта меняется относительно вычисленного, то перевычисляют значение ∆φ. Реальное отстояние не может превышать вычисленного, чтобы обеспечить
|
заданную точность построения модели объекта.
Реальное разрешение ска- нирования (плотность точек) объекта будет различным в зависимости от расстояния от сканера до различных частей объекта (рис. 8.25), поэтому при расчете ∆φ следует использовать максимальное расстояние. в
зонах перекрытия между скана- ми (рис. 8.26) плотность точек будет выше. Если сканер имеет встроенную камеру, то произ- водят фотосъемку объекта. Эти снимки используются глав- ным образом для присваивания каждой точке модели реальных цветов.
рис. 8.25
 рис. 8.26
рис. 8.26
Сканирование производится на каждой станции с вычисленным разрешением, а опорные маркированные точки сканируются отдельно с максимальным разрешением, чтобы определить их координаты с максимально возможной точностью в системе координат сканера. Коор- динаты опорных точек в системе координат объекта определяют одним из геодезических методов. Как правило, для этих целей используют электронный тахеометр.
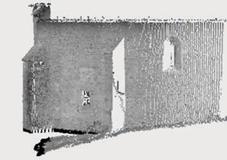
К а м е р а л ь н ы е р а б о т ы. Предварительная обработка резуль- татов сканирования осуществляется в специальном программном обе- спечении для работы с облаком точек и заключается в автоматической или интерактивной фильтрации облака точек с целью исключить точки, не принадлежащие объекту. Кроме того, каждой точке облака присва- ивается реальный цвет со снимков, полученных встроенной камерой. На рис. 8.27 показан фрагмент облака точек в реальных цветах. Здесь отчетливо видно, что для съемки всего объекта была получена серия снимков с помощью встроенной камеры.
Объединение отдельных моделей в единую модель объекта и внеш- нее ее ориентирование выполняется по связующим и опорным точкам, как это было описано в §8.3. Эти процессы выполняются в специализи- рованном программном обеспечении, которое позволяет автоматически измерять координаты маркированных опорных и связующих точек.
Для создания векторной 3D-модели объекта по облаку точек ис- пользуют специальное программное обеспечение, которое как правило имеет три метода векторизации объекта: автоматический, автоматизи- рованный и интерактивный. автоматический метод применяется когда элементы объекта имеют правильную форму (цилиндр, круг, шар, конус и т.д.). автоматизированный и интерактивный методы применяются для векторизации элементов объекта, имеющих сложную форму. в этом слу-
|

чае эти элементы векторизуются как полилинии или полигоны.
Для удобства оператора часто векторизацию выполняют по фотоснимкам высокого раз- решения, полученным внешними цифровыми камерами. в этом случае оператор выполняет рас-
познавание и саму векторизацию
рис. 8.27
|
деталей объекта по снимку, а результатом векторизации являются не плоские координаты точек снимка, а пространственные координаты точек объекта, так как каждой измеренной точке на снимке находится соответствующая точка на облаке точек.
 |
а б
рис. 8.28
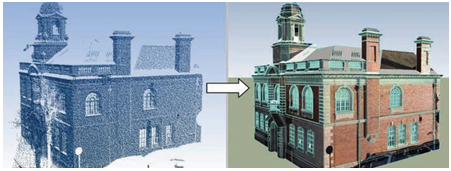
Результаты векторизации передаются, как правило, для даль- нейшего их редактирования и оформления в одну из CAD программ (MicroStation, Autocad и др.) или в специальные программы для оформления 3D-модели с реальной текстурой, такие как 3D Max и т.д. На рис. 8.28 показан пример 3D-модели с реальной текстурой (см. рис. 8.28, б), полученной по облаку точек (см. рис. 8.28, а).
 |
|

Глава 9
 |