
§7.9. особенности наземной фотограмметрической съемки инженерных конструкций и сооружений








Методы и технологии фотограмметрической обработки наземных снимков горных районов, выполняемых с целью создания карт и циф- ровых моделей местности, архитектурных сооружений и строительных объектов практически ничем не отличаются от методов и технологий применяемых при обработке аэрофотоснимков.
При съемке инженерных конструкций, таких как автомобили, модели самолетов и космических кораблей, параболические антенны и других, подобных перечисленным, объектов, с целью максимальной достоверности и точности полученных результатов и обеспечения возможности автоматизации измерений снимков, используют специ- ально разработанные для достижения этих целей методы наземной стереофотограмметрической съемки. Рассмотрим некоторые из этих методов.
маркированные точки
При изучении деформации инженерных конструкций под действи- ем внешних нагрузок, а также при исследовании формы и размеров различных объектов (автомобиль, самолет, судно и т.д) на поверхность исследуемой конструкции наносят маркировочные знаки, форма кото- рых, например, точка, окружность, крест, обеспечивает возможность монокулярного измерения их изображений на снимках, как в интерак- тивном, так и автоматическом режимах. Это обстоятельство позволяет производить съемку объекта, используя конвергентный случай съемки. На рис. 7.36 показан пример применения маркированных точек при из- учении формы кузова автомобиля.
|

|
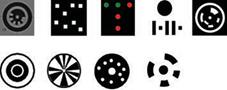
рис. 7.36
рис. 7.37
С целью автоматической идентификации номеров марки- рованных точек и повышения на- дежности отождествления точек на перекрывающихся снимках используют маркированные точки с номерами в виде гра- фических кодов. Каждый номер имеет свой индивидуальный графический образ. Образцы кодированных марок приведены на рис. 7.37.
Соответствующие номера точек получают путем корреля- ции исходного изображения с эталонами графических образов номеров точек.
Применение измерительного щупа и камер
|

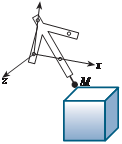
Другой способ изучения по- верхности объектов в отдельных точках основан на применении измерительного щупа и несколь- ких камер. На рис. 7.38 показаны примеры измерительных щупов. На рис. 7.39 показан прин-
цип измерения координат точек объекта с помощью щупа и двух камер. Каждый щуп имеет свою систему координат ox yz, задава- емую маркированными точками на этом щупе. в этой системе координат известны координаты острого наконечника щупа. Если прикоснуться наконечником
 щупа к любой точке объекта М и Z снять его с помощью пары камер, элементы внешнего ориентирова- Y ния которых известны в системе
щупа к любой точке объекта М и Z снять его с помощью пары камер, элементы внешнего ориентирова- Y ния которых известны в системе
координат объекта OXYZ, то мож- O X
 но определить в автоматическом режиме координаты точки М в системе координат объекта. Для этого достаточно измерить ко-
но определить в автоматическом режиме координаты точки М в системе координат объекта. Для этого достаточно измерить ко-
рис. 7.38
 y
y
 |
рис. 7.39
ординаты маркированных точек щупа на паре снимков, решить прямые засечки в системе координат объекта и определить параметры перехода из системы координат щупа в систему координат объекта. На рис. 7.40
 |
рис. 7.40
приведен пример применения данного метода для контроля качества изготовления самолета. Точность определения координат в данном примере составила порядка 0,01 мм.
маркировка точек с помощью лазера или проектора
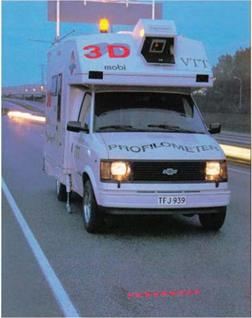
Некоторые системы для наземной фотограмметрии в качестве маркированных точек используют специальные проекторы и лазеры. Например, в системе «Mapvision» (рис. 7.41) применяется лазер для маркирования точки на поверхности объекта. в этом случае луч лазера сканирует поверхность объекта. При каждом положении луча лазера выполняется съемка двумя или более камерами. в результате на каждом снимке получается изображение только одной точки объекта, координа- ты которой в системе координат снимков определяются автоматически по известным алгоритмам.
|
|
|
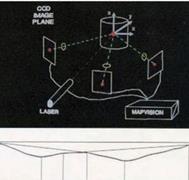
Проблема идентификации соответственных точек на снимках в этом случае отпадает, так как на всех снимках имеется изображение только одной точки. Затем, по этим координатам и известным элемен-
рис. 7.41
там внешнего ориентирования снимков решается прямая многократная засечка для определения координат точки объекта. Такую систему удобно применять для изучения гладких поверхностей, например, для исследования полотна дороги.
|

в случае применения проек- тора для задания на поверхности объекта сети маркированных точек, как это сделано в систе- ме V-STARS фирмы «Leica» (рис. 7.42), на всех снимках одно- временно изображаются все мар- кированные точки. в этом случае алгоритм получения координат точек объекта будет несколько
другим.
На первом этапе следует выполнить автоматическое вы- деление всех точек на каждом снимке, затем определить со- ответствующие координаты этих точек в системе координат снимков. Теперь необходимо выполнить отождествление со- ответственных точек на снимках. Если съемка выполнялась тремя или более камерами (рис. 7.43) под разными углами, то ото- ждествление можно осуществить достаточно просто, применяя те- орию базисных линий (рис. 7.44). Для каждой точки Р первого снимка определяется множество точек Р1 второго снимка, рас- стояние которых от базисной линии точки первого снимка на втором не более некоторого по- рога (точки-кандидаты). После
рис. 7.42
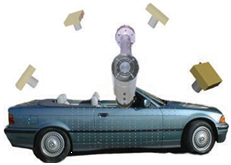 |
рис. 7.43
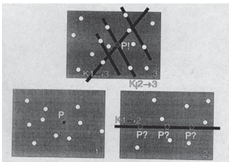 |
рис. 7.44
этого определяются точки пересечения базисных линий точки первого снимка и точек-кандидатов второго снимка на третьем снимке. Соот- ветствующей точкой на третьем снимке считается точка, для которой расстояние от какой-либо точки пересечения базисных линий до нее минимально. в результате применения этого алгоритма находятся сразу все соответственные точки на трех снимках. Затем решается прямая многократная засечка для определения пространственных координат точки объекта. аналогичным образом поступают со всеми точками.
Применение структурированного света
|

При изучении объектов с малоконтрастными поверхностями (ав- томобиль, самолет и т.п.) используют оптический проектор, с помощью которого проектируют структурированное изображение на поверхность объекта в виде случайного поля яркостей (рис. 7.45), или в виде световых полос (рис. 7.46), или в виде регулярной сетки. Такая подсветка позволяет по снимкам построить плотную цифровую модель поверхности объекта
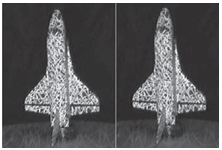 |
рис. 7.45

рис. 7.46 рис. 7.47
|
в автоматическом режиме. На рис. 7.47 показан пример такой модели, построенной с помощью системы V-STARS.
 |
Глава 8
 |
трехмерное наземное лазерное сканирование