
§7.5. основные случаи наземной стереофотограмметрической съемки








При выполнении наземной стереофотограмметрической съемки в зависимости от условий съемки (расположения объекта относительно то- чек фотографирования и его размеров) используется несколько основных вариантов съемки, которые в фотограмметрии называют о с н о в н ы м и с л у ч а я м и с ъ е м к и. К основным случаям наземной стереофото- грамметрической съемки относят нормальный, равноотклоненный, равнонаклонный и конвергентный случаи съемки.
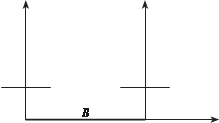
Н о р м а л ь н ы й с л у - ч а й с ъ е м к и — наиболее распространенный в практике фотограмметрии случай съем- ки. в этом случае оси x, y и z систем координат съемочных камер (снимков) приблизитель- но параллельны соответственно осям X, Z и Y базисной системы координат (рис. 7.24). При этом угловые элементы внешнего
Y
 X
X
S1 S2
рис. 7. 24
ориентирования снимков имеют следующие значения: a1 ≈ a2 ≈ 0°;
w1 ≈ w2 ≈ 90°; κ1 ≈ κ1 ≈ 0°.
Как показал практический опыт работ при съемке цифровыми ка- мерами со штативом или без него (с рук) значения угловых элементов внешнего ориентирования съемочных камер устанавливаются с точ- ностью не ниже 3–7°. Нормальный случай съемки используют, когда базис при съемке можно расположить приблизительно параллельно объекту съемки, а по высоте объект полностью изображается на сним- ках стереопары.
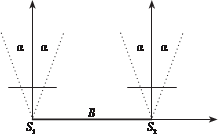
Р а в н о о т к л о н е нный с л у ч а й с ъ е мк и. в отличие от нормального случая съемки в равноотклоненном случае оси z (оптиче- ские оси) съемочных камер приблизительно параллельны между собой и отклонены от оси Y базисной системы координат на угол a (рис. 7.25). Угловые элементы внешнего ориентирования снимков в этом случае имеют следующие значения: a1≈a2≈a; w1≈w2≈90°; κ1≈κ1≈0°. Равнооотклоненный случай съемки используют в качестве дополнения к нормальному случаю при необходимости увеличить
 зону съемки по горизонтали. Для Y
зону съемки по горизонтали. Для Y
этого с одного базиса производят съемку стереопары нормального случая и одной или двух стереопар равноотклоненного случая съем- ки. Кроме того, равнотклоненный случай съемки целесообразно применять при непараллельности базиса съемки объекту.
X
рис. 7. 25
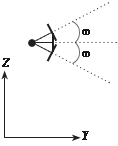
рис. 7. 26
Р а в н о н а к л о н н ы й с л у ча й с ъ е м к и. в равно- наклонном случае съемки оси z (оптические оси) камер прибли- зительно параллельны между собой и наклонены относительно горизонтальной плоскости на некоторый угол w (рис. 7.26). Угловые элементы внешнего ори- ентирования снимков в этом слу- чае имеют следующие значения:
 a1 ≈a2 ≈ 0°; w1 ≈w2 ≈w; κ1 ≈κ1 ≈ 0°. Наклоном съемочной камеры на
a1 ≈a2 ≈ 0°; w1 ≈w2 ≈w; κ1 ≈κ1 ≈ 0°. Наклоном съемочной камеры на
угол w можно добиться оптимального расположения объекта на снимке. Равнонаклонный случай целесообразно использовать, например, при съемке высоких зданий.
S1 S2
рис. 7. 27
К о н в е р г е н т ный с л у - ча й с ъ е м к и. в конвергент- ном случае съемки с целью увеличения базиса фотографи- рования и как следствие точ- ности фотограмметрических определений оптические оси съе- мочных камер повернуты друг к другу на углы a и пересекаются
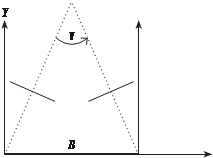 X под углом g — углом к о н в е р -
X под углом g — углом к о н в е р -
г е н т н о с т и (рис. 7.27).
При больших значениях
угла конвергенции становится невозможным стереоскопическое на- блюдение и измерение полученных стереопар снимков конвергент- ного случая съемки. Поэтому конвергентный случай используется для съемки объектов с четкими контурами или маркированными точками, что обеспечивает возможность монокулярных измерений. Стереоскопическое наблюдение и измерение стереопар снимков кон- вергентного случая съемки возможно в случае их предварительного цифрового трансформирования в стереопару снимков нормального случая съемки.
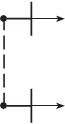 в ряде случаев практики, например, при съемке высоких сооружений, целесообразно про- S2 изводить получение стереопар снимков нормального, равноот- клоненного и равнонаклонного случаев съемки с вертикального базиса. в этом случае в базисной S1
в ряде случаев практики, например, при съемке высоких сооружений, целесообразно про- S2 изводить получение стереопар снимков нормального, равноот- клоненного и равнонаклонного случаев съемки с вертикального базиса. в этом случае в базисной S1
системе координат ось Z горизон-
тальна. На рис. 7.28, в качестве примера, представлена стереопа- ра снимков нормального случая съемки с вертикального базиса.

рис. 7. 28
М а р ш р у т на я и б л о ч на я с ъ е м к и. При съемке протяжен- ных объектов целесообразно производить маршрутную или блочную съемку объекта. На рис. 7.29 показан вариант маршрутной съемки здания.
в маршрутной съемке из смежных снимков маршрута форми- руется стереопары снимков нормального или равнонаклонного слу- чаев съемки. При этом съемка выполняется таким образом, чтобы у смежных стереопар имелась область тройного перекрытия. Для этого съемку выполняют так, чтобы смежные снимки в маршруте перекрывались по направлению маршрута приблизительно на 60%. в случае, если при проведении маршрутной съемки объект изобража- ется на снимках по высоте не полностью, производят блочную (много- маршрутную) съемку, в которой
 выполняют дополнительную маршрутную съемку объекта, формируя один или несколько маршрутов, параллельных пер-
выполняют дополнительную маршрутную съемку объекта, формируя один или несколько маршрутов, параллельных пер-
вому маршруту с поперечным пе- рекрытием маршрутов не меньше 20–30%. возможны два варианта проведения блочной съемки. в первом варианте маршрутные съемки производят с разных высот, например, с поверхности
Y
l x
l y
f B B f
S1 S2 S3
рис. 7. 29
 B v
B v
B
 рис. 7. 30
рис. 7. 30
 рис. 7. 31
рис. 7. 31
 B S5
B S5
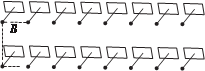
земли и крыши здания (рис. 7.30). во втором варианте с каждой точки фотографирования полу- чают снимки при разных углах наклона w, из которых формиру- ют перекрывающиеся маршруты из стереопар снимков нормаль- ного и равнонаклонного случаев съемки (рис. 7.31).
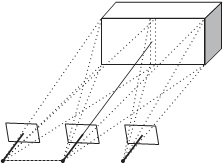
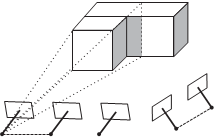
 При выполнении наземной стереофотограмметрической съемки могут возникнуть так называемые «мертвые» зоны (участки объекта не изобразив- шиеся на стереопаре снимков). Для съемки этих участков объ- екта производят съемку с допол- нительных базисов. На рис. 7.32
При выполнении наземной стереофотограмметрической съемки могут возникнуть так называемые «мертвые» зоны (участки объекта не изобразив- шиеся на стереопаре снимков). Для съемки этих участков объ- екта производят съемку с допол- нительных базисов. На рис. 7.32
«мертвые» зоны, возникающие при проведении съемки с точек фотографирования S1, S2, S3, пока- заны серым цветом. Для съемки этой части объекта необходим дополнительный базис фотогра- фирования (S4–S5).
На рис. 7.33 показаны не-
которые технические средства,
f B f B f
S применяемые для реализации
S1 S2
S3 4
рис. 7. 32
вышеописанных случаев съемок в наземной фотограмметрии.