
§6.14. определение координат точек местности для случая, когда измеряются эВо сенсора во время съемки








Современные съемочные системы, как правило, состоят из самого сенсора, приемника глобальной навигационной системы и инерциаль- ной навигационной системы, которые жестко связаны между собой на борту летательного аппарата.
в качестве с е н с о р а применяются кадровые аэрофотоаппараты (камеры), оптико-механические и оптико-электронные сканерные съе- мочные системы, лазернолокационные съемочные системы, радиолока- ционные съемочные системы и др. Эти сенсоры, как известно, предназна- чены для съемки земной поверхности и других объектов. Г л о б а л ь н а я на в и г а ц и о н на я с и с т е ма п о з и ц и о н и р о в а н и я G P S
предназначена для определения линейных элементов внешнего ориентирования (ЭвО) сенсора во время съемки. И н е р ц и а л ь -
 GPS
GPS
Y
→
|
GPS/INS
Z
 X
X
на я на в и г а ц и о н на я с и - с т е м а I N S предназначена для определения угловых элементов и совместно с GPS-линейных ЭвО сенсора.
Получим формулы для вы- числения координат точек объ- екта, если известны элемен-
→
RGPS
Z
→
RINS
OINS
→
→



|
INS/S
|
R
M
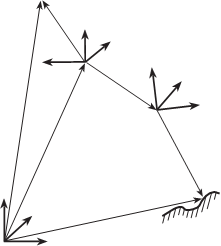
ты внешнего ориентирования сенсора, измеренные в полете. На рис. 6.32 показаны:
OGPSXYZ — система коор- динат объекта, в которой изме-
ряется положение антенны GPS
Y
OGPS X
R M
рис. 6.32
(вектор RGPS ); Sx yz — система координат сенсора, в которой определя- ется положение точки объекта М (вектор R ); OINSXYZ — система коор-
динат инерциальной навигационной системы, в которой определяются
в результате калибровки всей съемочной системы векторы r и
|
INS/S
INS/GPS
, задающие взаимное положение инерциальной системы, сенсора
и антенны GPS.
Таким образом, вектор
R M , определяющий положение точки М
объекта в системе координат объекта можно получить (см. рис. 6.32),
по формуле
= + A r + A A , (6.14.1)
R M
RINS INS INS/S INS INS/S R
где RINS = RGPS - AINSrGPS/INS; AINS — матрица поворота, которая вычис-
ляется по трем углам, измеряемым инерциальной системой, т.е. эта матрица определяет угловую ориентацию системы координат OINSXYZ относительно системы координат объекта OGPSXYZ; AINS/S — матрица по-
ворота, определяющая угловую ориентацию системы координат сенсора
Sx yz относительно системы координат инерциальной навигационной системы OINSXYZ. Эта матрица определяется в результате калибровки съемочной системы.
Формула (6.14.1) может быть применена для любого сенсора, раз- личие заключается только в определении координат вектора R в системе координат сенсора.
Д л я к а д р о в о й с ъ е м о ч н о й с и с т е м ы:
æ x - x0 ö
R = Nr ;
r = ç y - y0 ÷,
|
|
ç ÷
è -f ø
где N — скаляр; x, y — измеренные координаты ночки на снимке;
x0, y0, f — элементы внутреннего ориентирования съемочной камеры.
Д л я с к а н е р н о й с ъ е м о ч н о й с и с т е м ы:
æ x ö
R = Nr;
r = ç y ÷,
ç ÷
çè z ÷ø
где x, y, z — координаты единичного вектора, определяющего направле- ние на точку местности М в системе координат сенсора (определяются на основе измерений по сканерному изображению).
Д л я л а з е р но - л ок а ц ион но й и р а д ио л ок а ц ион но й с ъ е мо к:
æ 0 ö
|
|
R = ç sin j ÷ D,
çè - cos j÷ø
где D — измеренное расстояние от точки S до точки M; φ — угол наклона вектора R в плоскости S yz системы координат сенсора (в лазернолока-
ционной съемочной системе этот угол измеряется, а в радиолокационной съемочной системе вычисляется).
§6.15. фототриангуляция по сканерным изображениям
Как известно, современные сканерные съемочные системы оснащены GPS/IMU системами для измерения элементов внешнего ориентирова- ния сканера во время съемки. Точность этих определений вполне доста- точна для решения определенного класса задач. Однако для получения максимально возможной точности обработки сканерных изображений целесообразно выполнить фототриангуляцию, которая позволяет со-
вместно уравнять результаты фотограмметрических измерений связующих точек с результатами бортовых измерений. в резуль- тате получают более точные и надежные элементы внешнего ориентирования сканера. Для выполнения фототриангуляции необходимо выполнить съемку как минимум с тройным пере- крытием сканерных изображе- ний. Такая съемка получается, например, с помощью сканера, имеющего три линейки ПЗС в фокальной плоскости. в резуль- тате каждая точка местности изображается на трех сканерных снимках (рис. 6.33). Если съемка
Фиксированные центры проекции
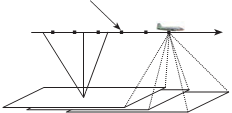 S k S S k+1
S k S S k+1
M
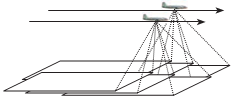 рис. 6.33
рис. 6.33
рис. 6.34
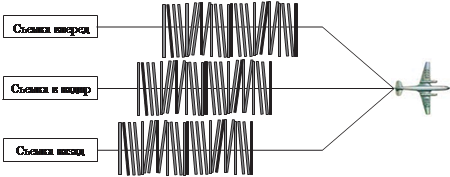 |
ведется параллельными маршрутами с перекрытием (рис. 6.34), то в зоне перекрытия маршрутов точки местности изображаются на шести сканер- ных снимках. На рис. 6.33 показана схема съемки с помощью сканера, имеющего три линейки ПЗС в фокальной плоскости. При этом одна ли- нейка снимает местность вперед по направлению полета носителя, другая снимает в надир, а третья – назад. Таким образом, для одного и того же участка местности имеем три изображения (рис. 6.35), полученных под разными углами, т.е. имеем три стереопары.
рис. 6.35
Для выполнения фототриангуляции сначала из всех центров про- екции выделяют, так называемые «фиксированные центры проекции» через равные интервалы времени. На рис. 6.33 эти центры проекции показаны черными квадратиками (S k, S k+1,…), а соответствующие им строки изображений на рис. 6.35 выделены черным цветом. в результате фототриангуляции определяют элементы внешнего ориентирования сканера для фиксированных центров проекции. Интервал времени между двумя фиксированными центрами проекции зависит от точности инерциальной системы. Чем точнее инерциальная система тем больше интервал времени между фиксированными центрами проекции мож- но выбрать. С геометрической точки зрения расстояние между двумя фиксированными центрами проекции целесообразно выбрать равным короткому базису съемки.
Фототриангуляция выполняется на основе известных уравнений коллинеарности:
 |
x = -f a11( X - X S ) + a21(Y - Y S ) + a31(Z - Z S ) ; ü
a13 ( X - X S ) + a23 (Y - Y S ) + a33 (Z - Z S ) ïï
a ( X - X ) + a (Y - Y ) + a (Z - Z ) ý
(6.15.1)
y = -f 12
S 22
S 32
S ,ï
a13 ( X - X S ) + a23 (Y - Y S ) + a33 (Z - Z S ) ïþ
где X, Y, Z — координаты точки объекта М (см. рис. 6.33) в системе координат объекта; x, y — координаты соответствующей точки в системе координат сканера; X S, Y S, Z S, ω, α, κ — элементы внешнего ориентирования сканера в момент формирования изображения точки объекта М.
ЭвО сканера вычисляются следующим образом:
X S = cX Sk + (1 - c) X Sk +1 - dX S ;
Y S = cY Sk + (1 - c)Y S k +1 - dY S ;
Z S = cZ Sk + (1 - c) Z Sk +1 - dZ S ;
w = cwk + (1 - c)wk +1 - dw;
a = cak + (1 - c)ak +1 - da;
k = ckk + (1 - c) kk +1 - dk,
где c =
t k +1 - t ;

dX = cX GPS + (1 - c) X GPS - X GPS;
t k +1 - t k
S Sk Sk +1 S
|
|
|
|
dY S = cY GPS + (1 - c)Y GPS - Y GPS; dZ S = cZ GPS + (1 - c) Z GPS - Z GPS;
|
|
dw = cwIMU + (1 - c)wIMU - wIMU ; da = caIMU + (1 - c)aIMU - aIMU ;
|
dk = ckIMU + (1 - c) kIMU - kIMU ; X Sk, Y Sk, Z Sk, ωk, αk, κk — элементы внеш- него ориентирования сканера в момент формирования изображения
в фиксированном центре проекции S k; X Sk+1, Y Sk+1, Z Sk+1, ωk+1, αk+1, κk+1 — элементы внешнего ориентирования сканера в момент формирования изображения в фиксированном центре проекции S k+1; с — коэффициент
интерполяции; t — время формирования изображения точки объекта М;
t k и t k+1 — ближайшие к t время, когда сканер находился в фиксированных
центрах проекции S k и S ; X GPS , Y GPS, Z GPS , X GPS , Y GPS , Z GPS — линейные
k+1 Sk Sk Sk Sk +1 Sk +1 Sk +1
|
ЭвО сканера, измеренные с помощью GPS в момент формирования изо- бражения в фиксированных центрах проекции S k и S k+1; X GPS , Y GPS, Z GPS
— линейные ЭвО сканера, измеренные с помощью GPS в момент форми-
рования изображения точки объекта М; wIMU , aIMU , kIMU , wIMU , aIMU , kIMU
k k k k +1 k +1 k +1
— угловые ЭвО сканера, измеренные с помощью инерциальной системы IMU в момент формирования изображения в фиксированных центрах
проекции S k и S
k+1
; wIMU , aIMU , kIMU — угловые элементы внешнего ори-
ентирования сканера, измеренные с помощью инерциальной системы IMU в момент формирования изображения точки объекта М.
Уравнения (6.15.1) составляются для связующих и опорных точек. в качестве неизвестных в этих уравнениях выступают элементы внеш- него ориентирования сканера в момент формирования изображения в фиксированных центрах проекции и координаты X,Y,Z связующих точек. в качестве связующих точек выбирают любые контурные точки, опоз- нанные на перекрывающихся изображениях и равномерно распределен- ные по площади изображений. Уравнения (6.15.1) являются нелиней- ными, поэтому переходят к линейным уравнениям поправок и задачу решают по методу наименьших квадратов способом последовательных приближений. К системе уравнений (6.15.1) добавляют уравнения для бортовых измерений, выполненных с помощью GPS и IMU, аналогично тому, как это делалось в фототриангуляции по способу связок по кадро- вым снимкам. Эти группы уравнений решают совместно. в результате получают уравненные значения ЭвО сканера в момент формирования изображения в фиксированных центрах проекции и координаты свя- зующих точек. Если результаты бортовых измерений отсутствуют, по
каким-либо причинам, то фототриангуляцию можно выполнить только по связующим и опорным точкам.
По элементам внешнего ориентирования сканера в момент форми- рования изображения в фиксированных центрах проекции, полученным в результате фототриангуляции, и по результатам бортовых измерений GPS/IMU определяют уточненные значения элементов внешнего ори- ентирования для каждой строки сканерного изображения и выполняют по ним трансформирование каждой строки изображения. Поученные таким образом изображения используются для получения цифровой модели рельефа, ортофотопланов и т.п.