
§6.8. принцип действия лазерно-локационных съемочных систем








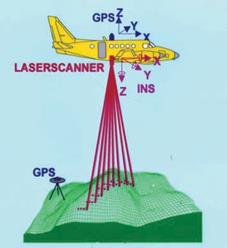
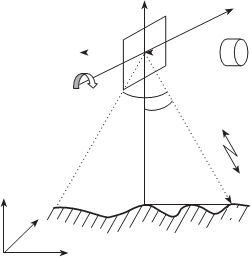
лазерно-локационная съемочная система по принципу действия на- поминает оптико-механический сканер, только вместо диафрагмы имеется лазер, с помощью которого сканируется (облучается) поверхность Земли (рис. 6.16). Эта съемочная система относится к активным системам. лазер- ный луч с определенной частотой посылается в сторону поверхности Земли, возвращается в съемочную систему и фиксируется в приемнике излучения в виде интенсивности отраженного сигнала. Кроме того, фиксируется время прохождения лазерного луча от лазера до поверхности Земли и обратно до приемника излучений, что позволяет определить расстояние D до данной точки Земли (рис. 6.17). Фиксируя
|
угол поворота зеркала φ, можно определить координаты точки поверхности Земли в системе координат сканера Sx yz, а зная эле- менты внешнего ориентирования сканера в этот момент, можно вы- числить координаты этой точки в системе координат объекта OXYZ. Таким образом, результатом ра- боты лазерного сканера является трехмерная модель снимаемого объекта в виде облака точек с известными координатами X, Y, Z и интенсивностью отраженного сигнала.
рис. 6.16
 z
z
Зеркало
Приемник
 x излучения
x излучения
 S
S
y
Объектив
θ
φ
D
Полупрозрачная поверхность
Импульс- ный лазер
Z y
Y M
O X
рис. 6.17
Система координат лазерного сканера задается следующим образом (см. рис. 6.17). Начало системы S совпадает с точкой пересечения оси враще- ния зеркала и оптической осью системы. Ось x совпадает с осью вращения зеркала. Ось z проходит через центр проекции S и совпадает с биссектрисой угла поля зрения сканера q. Ось ó дополняет систему до правой. Положи-
тельное направление оси xс_о_впадает с направлением полета.
Координаты вектора SM в системе координат сканера определяют как
æ
|
SM = ç
0
sin j
ö
|
÷ D.
(6.8.1)
ç - cos j÷
è ø
Если известны элементы внешнего ориентирования X Si, Y Si, Z Si, ai,
wi, κi лазерного сканера в момент измерения наклонного расстояния D, то координаты точки М в системе координат объекта можно определить
по известным формулам:
æ X ö
æ X Si ö
æ 0 ö
çY ÷ = çY Si
÷ + A ç
sin j
÷ D.
(6.8.2)
ç ÷ ç ÷ ç ÷
çè Z ÷ø
çè Z Si ÷ø
çè - cos j÷ø

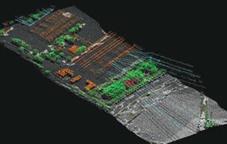
рис. 6.18
Элементы внешнего ориентирования X Si, Y Si, Z Si, ai, wi, κi, лазерного сканера во время съемки определяются с помощью навигационного комплекса в составе дифференциальной GPS- системы и инерциаль- ной системы. На рис. 6.18 приведены типичные результаты съемки с помощью воздушного лазерного сканера после классификации облака точек (выделения точек, принадлежащих различным объектам: рельеф, строения, растительность и т.п.).