
§6.2. принцип формирования изображения с помощью оптико-электронной сканерной съемочной системы. системы координат сканера








Оптико-электронные сканеры основаны на применении линеек и матриц ПЗС, формирующих в один момент времени строку изображения. На рис. 6.2 показан принцип сканирования с помощью оптико-электрон- ной сканерной съемочной системы (здесь Δ — размер пикселя линейки ПЗС, Δм — его размер на местности). линейка ПЗС располагается в фокальной плоскости объектива. Изображение формируется за счет перемещения носителя камеры. в результате получают непрерывное изображение снимаемого участка местности, состоящее из множества строк. в пределах одной строки изображение соответствует центральной проекции со своими элементами внешнего ориентирования, которые фиксируются во время съемки. Знание элементов внешнего ориентирова- ния каждой строки изображения необходимо для корректной фотограм-
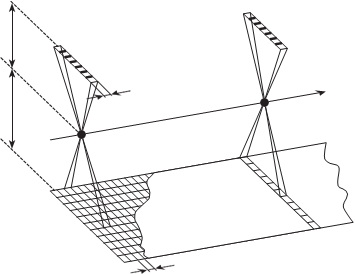 f
f
линейка ПЗС
Направление полета
|
H Δ S
S0
Δм
рис. 6.2
метрической обработки таких изображений. в некоторых сканерных системах в качестве сенсора используется не линейка, а матрица ПЗС (рис. 6.3), что позволяет уменьшить смаз изображения.
Принцип функционирования системы электронной компенса- ции смаза состоит в том, что заряд, накопленный пикселами строки изображения, переносится на пикселы соседней строки синхронно с перемещением изображения в плоскости матрицы, затем к следующей строке, и так далее во все время экспозиции. Пикселы каждой строки (в пределах диапазона перемещения изображения за время экспозиции) продолжают накапливать заряд, освещаясь лучами, приходящими от тех же самых точек объекта. Это позволяет избежать смаза и работать при более низких уровнях освещенности.
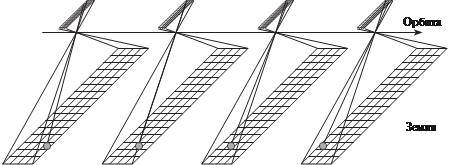
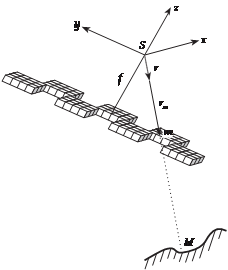
У некоторых съемочных сканерных систем в фокальной плоскости находятся несколько матриц, расположенных в шахматном порядке с перекрытием (рис. 6.4). Здесь одна строка изображения формируется также путем накопления зарядов от строки к строке матриц ПЗС.
У космических сканерных съемочных систем для получения хорошего разрешения на местности фокусное расстояния f как
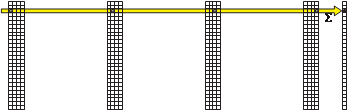 t1 t2 t3 t4
t1 t2 t3 t4
 |
t1 t2 t3 t4
рис. 6.3
 Матрица ПЗС
Матрица ПЗС
Σ =
Строка изображения
Направление полета
рис. 6.4
правило более одного метра (IKONOS — 1 м , QuicikBird — 0,6 м, GeoEye-1 — 0,4 м), угол поля зрения маленький, что позволяет, на- пример, снимать полосу поверхности Земли шириной примерно 60 км при съемке в надир с разрешением 1 м.
На рис. 6.5 показана система координат сканера с одной линейкой или матрицей ПЗС. Начало системы координат сканера Sx yz совпадает с центром проекции S; ось z проходит через центр проекции перпенди- кулярно к линейке (матрице) ПЗС; ось y — параллельна линейке или строкам матрицы ПЗС; ось x — дополняет систему координат до правой (совпадает с направлением полета носителя).
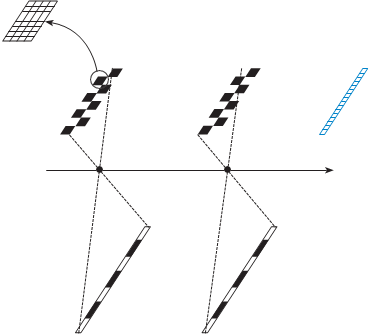
Для сканеров, у которых в фокальной плоскости находятся два ряда матриц расположенных в шахматном порядке, начало системы ко- ординат сканера Sx yz также совпадает с центром проекции S; ось z про- ходит через центр проекции перпендикулярно к фокальной плоскости; ось y — параллельна строкам матриц ПЗС; ось x — дополняет систему координат до правой (совпадает с направлением полета носителя) (рис. 6.6).
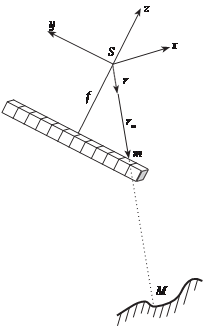
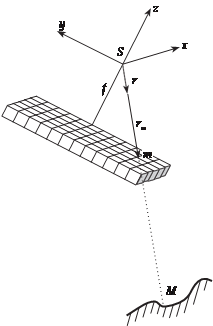
рис. 6.5
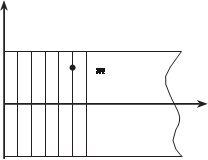
На рис. 6.7 показана система
рис. 6.6
координат сканерного изображе- ния: ось yс — совпадает c одной из строк изображения; начало системы координат О находится в середине строки, ось xс — до- полняет систему до правой. По измеренной координате xс точки изображения m(xс, y с) можно узнать в какой строке находится данная точка, а следовательно, и время формирования изображе- ния этой строки и ее элементы внешнего ориентирования.
 Измерив координату y с, можно восстановить проекти- рующий луч, определяющий
Измерив координату y с, можно восстановить проекти- рующий луч, определяющий
 направление на точку местности, yc т.е. вектор r m (см. рис. 6.5, 6.6) имеет следующие координаты в системе координат сканера:
направление на точку местности, yc т.е. вектор r m (см. рис. 6.5, 6.6) имеет следующие координаты в системе координат сканера:
æ x i ö
r m = ç yc - y0 ÷, (6.2.1)
|
|
ç ÷ O xc
è -f ø
где y0 — ордината главной точки сканерной съемочной системы в системе координат сканерного изображения; x i — абсцисса по-
рис. 6.7
следней строки матрицы ПЗС, в которой заканчивается формирование
строки изображения; i — номер матрицы.
величины y0 и x i определяются в результате калибровки сканерной съемочной системы. Для сканерной съемочной системы, у которой в качестве сенсора используется линейка ПЗС, x i=0.
Координаты соответствующего единичного вектора r можно опре-
делить по формуле
|
æ x ö
 ç ÷
ç ÷
|
ç ÷ æ x ö
r = c 0 = ç y ÷, (6.2.2)
 ç ÷ ç ÷
ç ÷ ç ÷

 где r =
где r =
x2 + (y
ç
ç
|
ç
è
|
|
- y )2 + f2 .
-f
 r m
r m
÷ çè z ÷ø
|
|
÷
ø
|
все дальнейшие рассуждения и определение координат точек мест- ности по сканерным изображениям будут одинаковыми для всех типов оптико-электронных сканеров.