
§5.4. отождествление соответственных точек по методу наименьших квадратов с учетом геометрических и фотометрических искажений снимков








До сих пор (см. §5.2) мы предполагали, что параллаксы являются постоянными величинами в пределах фрагментов изображений. Однако на практике это не так. вследствие геометрических несоответствий (ис- кажений) двух фрагментов изображений, вызванных влиянием разности высот фотографирования, углов наклона снимков и рельефа местности параллаксы в каждом пикселе будут свои (см. §5.3). Кроме того, снимки имеют фотометрические несоответствия.
Г е о ме т р и че ск ие и ск а ж е н и я двух фрагментов изображе- ний можно описать с помощью аффинных, конформных, проективных или перспективных преобразований. Для снимков, полученных по законам центрального проектирования, наилучшим образом подходят перспективные преобразования (уравнения коллинеарности). Позже будет рассмотрен этот вариант.
Как показывает практика, для небольших фрагментов изображений геометрические искажения с достаточной степенью точности могут быть описаны с помощью аффинных преобразований. Рассмотрим этот вариант учета разности геометрических искажений двух фрагментов изображений:
x2 = b1x1 + b2y1 - p; y2 = c1 x1 + c2y1 - q, (5.4.1)
тогда исходное уравнение (5.2.1) примет вид:
f1 ( x1, y1 ) - f2 (b1 x1 + b2y1 - p, c1 x1 + c2y1 - q) = 0.
(5.4.2)
в этом уравнении неизвестными являются параллаксы p, q и ко- эффициенты аффинных преобразований b1, b2, c1, c2. Соответствующее уравнение поправок можно записать так:
a1dp + a2dq + a3db1 + a4db2 + a5dc1 + a6dc2 + l = v. (5.4.3)
Частные производные имеют вид:
a1 = g x ;
a2 = g y ;
a3 = g xx1;
a4 = g xy1;
a5 = g yx1;
a6 = g yy1;
(5.4.4)
свободный член ℓ вычисляется по формуле (5.4.2) по приближенным значениям неизвестных.
Неизвестные параллаксы и коэффициенты аффинных преобразо- ваний находят по способу наименьших квадратов методом последова- тельных приближений. Причем после каждого приближения, уточнив значения неизвестных параллаксов и коэффициентов аффинных пре- образований, следует сформировать новый фрагмент изображения (матрицу поиска) на правом снимке (рис. 5.10).
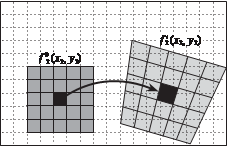 При этом коордиаты пик- селей матрицы поиска вычис- ляются по формулам (5.4.1), а соответствующие яркости – по исходному снимку методом двойного линейного интерпо- лирования. Здесь следует учи- тывать то обстоятельство, что в результате аффинных преобразо-
При этом коордиаты пик- селей матрицы поиска вычис- ляются по формулам (5.4.1), а соответствующие яркости – по исходному снимку методом двойного линейного интерпо- лирования. Здесь следует учи- тывать то обстоятельство, что в результате аффинных преобразо-
рис. 5.10
ваний каждый пиксель матрицы поиска может увеличиться по
площади и для получения его яркости следует использовать все пиксели исходного снимка, которые он накрывает, а не только четыре соседних пикселя. Полученные таким образом яркости изображения участвуют в формировании уравнений (5.4.3).
Ф о т о м е т р и ч е с к и е р а з л и ч и я между двумя фрагментами изображений могут быть описаны с помощью, например, линейных преобразований. Тогда уравнение (5.4.2) можно записать как:
k0 + k1f1 ( x1, y1 ) - f2 (b1 x1 + b2y1 - p, c1 x1 + c2y1 - q) = 0, (5.4.5) а соответствующее уравнение поправок
a1dp + a2dq + a3db1 + a4db2 + a5dc1 + a6dc2 + a7dk0 + a8dk1 + l = v. (5.4.6)
Частные производные а1–а6 вычисляются по (5.4.4), а остальные по формулам
a7 = 1;
a8 = f1(x1, y1).
(5.4.7)
Таким образом, на основе уравнения (5.4.6) находят по методу наи- меньших квадратов продольный и поперечный параллаксы для данной точки с учетом геометрических и фотометрических различий между фрагментами изображений двух снимков. Следует отметить, что если обрабатываются цветные снимки, то коэффициенты фотометрических преобразований k0 и k1 находят для каждого канала (красный, синий, зе- леный). Для этого для каждого пикселя составляют три уравнения (5.4.6). Как показывают экспериментальные исследования, применение цветных изображений приводит к незначительному повышению точ- ности отождествления одноименных точек по сравнению с черно-бе- лыми изображениями или по сравнению с отождествлением по одному красному каналу. Поэтому иногда цветные изображения переводят в черно-белые и затем выполняют фотограмметрическую обработку, что
сокращает время обработки.
Метод наименьших квадратов позволяет найти параллаксы с точ- ностью до 0,01 пикселя. Однако этот метод имеет и существенный не- достаток – необходимость знания начальных приближений параллаксов с достаточной точностью (1–2 пикселя) и выполнения большого числа приближений, что может замедлить процесс вычислений.
Несколько слов о величине фрагментов изображений. Очевидно, что она влияет на точность отождествления точек. Чем меньше размеры фрагментов изображений, тем меньше число избыточных измерений, а как следствие понижается точность и надежность отождествления. С другой стороны, при увеличении размеров фрагментов изображений увеличивается вероятность ложных отождествлений. Поэтому жела- тельно иметь возможность менять размеры фрагментов в зависимости от качества исходных снимков. Если снимки хорошего фотографического качества с высоким контрастом и с изображением большого количества деталей местности отождествление можно начать с применения фраг- ментов размером 5×5, 7×7 или 9×9. Для снимков с повышенным уровнем фотометрического шума и низкой текстурой рекомендуется применять фрагменты размером 21×21 и даже более.