
§5.3. Проблемы автоматического стереоотождествления одноименных точек








При стереоскопическом рассматривании снимков у оператора не возникает проблем с отождествлением одноименных точек стереопары. автоматические методы отождествления точек стереопары не всегда дают однозначно правильное решение. Изложенные выше методы идентификации соответственных точек на стереопаре снимков пред- полагают, что фрагменты изображений, выбранные вокруг соответ- ственных точек на снимках стереопары, являются изображениями одного и того же участка снимаемого объекта. Однако это возможно только в том случае, когда стереопара снимков является идеальной (угловые элементы внешнего ориентирования снимков равны нулю, а
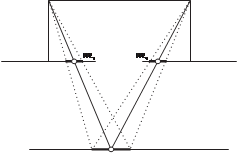
базис фотографирования параллелен оси Х системы координат объек- та), участок снимаемого объекта представляет собой горизонтальную плоскость (рис. 5.7). в этом случае все пиксели на левом и правом снимках в пределах некоторой области (например, 5×5 пикселей) во- круг соответственных точек m1 и m2 являются изображениями одних и тех же точек местности.
в реальных случаях оба снимка стереопары имеют, в общем слу- чае, различные значения углов наклона и разворота снимков, базис фотографирования не параллелен оси Х системы координат объекта, а рельеф местности не является горизонтальной плоскостью (рис. 5.8). в этом случае один и тот же участок местности (на рис. 5.8 он выделен серым цветом) изображается по разному на паре снимков. Теперь если
 S1 S2
S1 S2
 |  |
 M
M
рис. 5.7
 S2
S2
 |  |

 рис. 5.8
рис. 5.8
взять одинаковые фрагменты изображений (например, 5×5 пикселей) вокруг соответствующих точек m1 и m2 на первом и втором снимках, то увидим, что соответствующие пиксели будут отображать различные участки местности. Причем, чем дальше от центра фрагмента находится пиксель, тем больше расхождение. Учитывая то, что основой всех пло- щадных методов отождествления одноименных точек пары снимков является, по сути, сравнение яркостей соответствующих пикселей в пределах фрагментов снимков, то очевидно разномасштабность, углы наклона и поворота снимков и рельеф местности снижают надежность автоматического отождествления соответствующих точек стереопары. Кроме геометрических несоответствий изображений на паре сним-
ков могут быть фотометрические различия этих снимков. Причинами фотометрических несоответствий пары снимков могут быть: различ- ные отражательная способность поверхности и освещение; повторяе- мость поверхности объекта; большая величина шумов изображений. На рис. 5.9 показаны два фрагмента изображения одного и того же участка местности, которые имеюют фотометрические искажения.
Существуют различные алгоритмы, позволяющие учесть как геометрические, так и фотометрические несоответствия двух и более снимков при автоматическом отождествлении одноименных точек. Так, например, корреляционный метод (см. §5.1) позволяет учесть некоторые фотометрические искажения путем вычисления нормализованного коэф- фициента корреляции. Геометрические искажения изображений можно учесть при отождествлении по методу корреляции, используя аффинные
 |  |
рис. 5.9
преобразования фрагментов изображений. Такой подход полностью повторяет отождествление по методу наименьших квадратов с учетом геометрических искажений изображений. Поэтому способы учета гео- метрических и фотометрических искажений будут рассмотрены ниже на примере метода наименьших квадратов, который позволяет наиболее полно учесть все виды искажений.