
§4.4. цифровое ортофототрансформирование снимков с изображением искусственных сооружений








Известно, что одной из про-
С
h
ЦМР
M
Ортофото 1 2
S блем ортофотоизображений яв- ляется неправильное отображе- ние искусственных сооружений
 с (дома и другие постройки), име- ющих превышения над цифровой моделью рельефа (ЦМР). воз-
с (дома и другие постройки), име- ющих превышения над цифровой моделью рельефа (ЦМР). воз-
вышающиеся над поверхностью земли части этих сооружений изображаются со смещением относительно их положения в ортогональной проекции. Чтобы получить правильное отображе- ние в ортогональной проекции таких объектов необходимо иметь трехмерную цифровую
ЦМC
C'0 C0
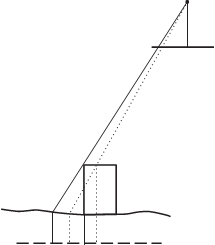 рис. 4.9
рис. 4.9
С
h
модель сооружений ( ЦМС), которая может быть получена
S в результате векторизации объ- ектов по стереопарам.
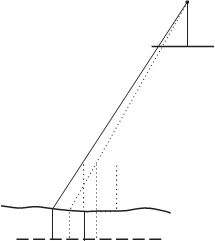
На рис. 4.9 показано фор-
с мирование ортофотоснимка без учета цифровой модели ис- кусственных сооружений и с учетом ЦМС (рис. 4.10). Если ортофотоизображение создается только по цифровой модели ре- льефа, то точка С, находящаяся на крыше здания, изобразит- ся на ортофотоизображении в
ЦМР
точке C¢ вместо своего пра-
M
Ортофото 1 2
0
вильного положения в ортого-
нальной проекции С . При этом
C'0 C0
рис. 4.10
0
точка местности М на ортофо-
 тоснимке не изобразится, так S
тоснимке не изобразится, так S
как лежит в мертвой зоне 1–2 (см. рис. 4.9). Таким образом, крыша здания будет смещена на ортофотоснимке относительно своей ортогональной проекции. Если имеется цифровая модель сооружений (см. рис. 4.10), то точка С изобразится на орто- фотоснимке дважды: в точках
С0 и
C0¢ . в этом случае крыша
здания займет правильное по- ложение в ортогональной про- екции, а в мертвой зоне 1–2 будет ее же изображение.
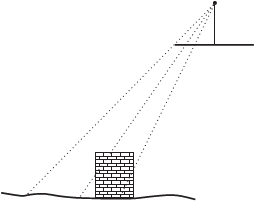
Существуют различные ал- горитмы определения и заполне-
рис. 4.11
ния мертвых зон изображением с других снимков, на которых они изобра- зились. Кроме того мертвые зоны можно определить на основе вычисления видимостей какого-либо объекта с заданной точки съемки S (рис. 4.11).
выявление видимости объекта на снимке начинается с централь- ного элемента цифровой модели местности (элемент, находящийся под центром проекции снимка S) и затем осуществляется проверка на условие видимости соседних элементов вокруг центрального, то есть определяется, закрывает ли исходный элемент соседний. Для этого сравнивают угол a, составленный лучом, направленным из точки S на элемент А и отвесной линией, с углом b — углом между направлением на элемент В и отвесной линией. Если a < b, то элемент А не закрывает соседний элемент В. Для сохранения результатов анализа создается матрица «ограничений» таких же размеров, как и ортофотоснимок. Элементы матрицы соответственно принимают значения «0», если эле- мент закрыт другим лучом или «1» — в противном случае. Следующий шаг обработки заключается в умножении каждого элемента матрицы пикселей ортофотоизображения на соответствующий элемент матрицы
«ограничений». Затем осуществляется поиск пикселей, имеющих яр- кость «0», и присвоение этим элементам значений яркостей из соседних ортофотоснимков.
Очевидно, что данный метод может быть реализован только при наличии ЦММ с шагом, равным размеру пикселя на ортофото. Полу- чение такой плотной ЦММ является достаточно сложной задачей, в основном из-за большого объема работ по редактированию такой мо- дели, особенно при наличии искусственных сооружений. Кроме того, проблематичным становится выявление мертвых зон в случае, если группа элементов закрывает другую группу элементов. Поэтому такой подход практически не пригоден для решения проблемы отображения искусственных сооружений. Он может быть применен только для мел- комасштабных снимков.
Существует другой метод, который больше подходит для создания ортофотоизображения местности с искусственными сооружениями. Метод предусматривает наличие цифровой модели рельефа и цифровой модели сооружений, представленных в векторном виде. Основная идея заключается в получении так называемой «и н д е к с н о й м а т р и ц ы», которая имеет размеры исходного снимка. Каждому элементу этой матрицы присваивается определенный код (число): 0 — для пикселей, отображающих поверхность земли; 1 — для пикселей, лежащих на верх- ней части сооружения («крыше»); 2 — для пикселей, принадлежащих вертикальным стенам (рис. 4.12).
Процесс создания индексной матрицы и ортофотоснимка состоит из следующих этапов:
1) вся индексная матрица (размером с исходный снимок) заполня- ется кодом 0, т.е. как бы все пиксели принадлежат поверхности земли;
2) перевычисляются все полигоны, принадлежащие крышам соору- жений и вертикальным стенам, в систему координат исходного снимка;
3) заполняется индексная матрица кодами 1 и 2 для крыш и стен соответственно. При этом учитывается видимость стен;
4) формируется ортофотоизображение с учетом только цифровой модели крыш, используя прямое или обратное трансформирование. в результате получают «ортофотоизображение крыш»;
5) на исходном снимке стираются все пиксели, имеющие коды 1 или 2. в результате получают «изображение-маску» (без изображений сооружений);
6) формируется ортофотоизображение с учетом только цифровой модели рельефа методом обратного трансформирования. Получают
«ортофотоизображение земли»;
 S
S
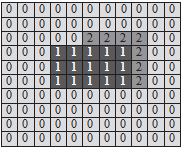 | 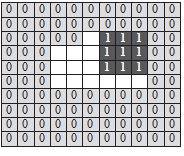 |
рис. 4.12
7) комбинируют «ортофотоизображение земли» с «ортофотоизобра- жением крыш», используя растровую алгебру. При этом мертвые зоны заполнятся белым цветом. Мертвые зоны можно заполнить изображе- нием с других исходных снимков, создав по ним независимые ортофо- тоснимки, а затем сформировать из них общее ортофотоизображение на заданный участок, используя растровую алгебру.
Этот способ является эффективным для отдельно стоящих зданий при неплотной застройке. Кроме того, он не решает проблемы мертвых зон, образуемых естественными формами рельефа.
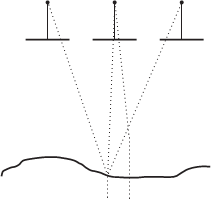
Ортофотоизображение можно строить на заданный участок сразу по всем исходным снимкам (без построения отдельных ортофотосним- ков по каждому исходному снимку) с учетом ЦМР и ЦМС, что позволит значительно сократить вычислительный процесс и более адекватно вы-
ЦМC ЦМР
S1 S2 S3
 С1
С1
h
брать снимок, с которого следует брать изображение. Идея метода показана на рис. 4.13. Для пиксе- ля ортофотоснимка М0 с коорди- натами X, Y по ЦМР определяют координату Z точки местности М. Затем по ЦМС анализируют есть ли над этой точкой сооружение. Если нет (как в данном случае), то переходят к анализу пересече-
M С ния лучей МS1, МS2, МS3 с ЦМС
Ортофото
M0 С0
рис. 4.13
для снимков, на которых должна изобразиться данная точка. Для луча МS3 такое пересечение су- ществует, поэтому снимок S3 из
дальнейшей обработки исключается, так как точка М на нем не изобра- зилась. Теперь встает вопрос, с какого снимка S1 или S2 взять яркость? Естественно, лучше взять яркость со снимка S2, так как луч МS2 ближе к надирному лучу, а следовательно, изображение точки М будет иметь меньшие искажения за счет центральной проекции исходных снимков. Для пикселя ортофотоснимка С0 с координатами X, Y, после нахождения координаты Z по ЦМР, к последней прибавляют высоту сооружения h, взятую из ЦМС. Яркость берут со снимка, для которого соответствую- щий проектирующий луч ближе к надирному, т.е. со снимка S2.
Таким образом формируется ортофотоизображение, на котором
все искусственные сооружения будут представлены в ортогональной проекции. в случае, если ЦМС отсутствует, то можно минимизировать смещения искусственных сооружений на ортофотоизображении путем формирования его сразу по всем снимкам, выбирая для каждого пикселя ортофотоизображения луч наиболее близкий к надирному.