
§2.4. Формулы связи координат точек местности и их изображений на стереопаре снимков (прямая фотограмметрическая засечка)








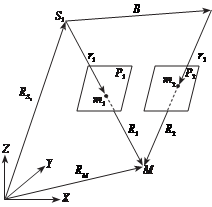
На рис. 2.12 показана стереопара снимков Р1 и Р2, на которых точка местности М изобразилась соответственно в точках m1 и m2. Будем счи- тать, что элементы внутреннего и внешнего ориентирования съемочных камер, с помощью которых были получены снимки, известны. выведем формулы связи координат точек местности и координат их изображений
на стереопаре снимков.
Из рис. 2.12 следует, что векторы
R M и
|
R S определяют соответ-
ственно положение точка местности М и центра проекции S1 снимка Р1
относительно начала системы координат объекта OXYZ. вектор B опре-
|
деляет положение центра про-
 екции S2 снимка Р2 относительно
екции S2 снимка Р2 относительно
центра прое_к_ ции S1. векторы
S M = R
S1m1 = r1 и
1 1 определяют
положение точек m1 и М отно-
сительно ц е н _тра прое к ц и и S 1.
|
векторы S m = r_ и S M = R
2 2
определяют положение точек m2 и М относительно центра про- екции S2, следовательно
|
R M = R S + R1. (2.4.1) O
рис. 2.12
Так как векторы R1
где N — скаляр.
и r
|
коллинеарны, то
R1 = N r1, (2.4.2)
С учетом (2.4.2) выражение (2.4.1) будет иметь вид
|
R M = R S + N r1. (2.4.3)
в координатной форме выражение (2.4.3) будет иметь вид
æ X ö
æ X S ö
æ X ¢ ö
ç Y ÷
ç
= ç Y S
1 ÷
÷ + N
1
Y1¢
, (2.4.4)
|
|
ç ÷ ç 1 ÷ ç ÷
ç Z ÷
ç Z ÷
ç Z1¢ ÷
¢ ¢ ¢
è ø è S1 ø è ø
где
X1, Y1, Z1
— координаты вектора
r1 в системе координат объекта
OXYZ,
æ X1¢ ö æ x1 - x01 ö
ç Y1¢ ÷ = A1 ç y1 - y01 ÷.
ç ÷ ç ÷
ç Z1¢ ÷ ç -f1 ÷
è ø è ø
Найдем значениеN, входящее в выражение (2.4.4). Из рис. 2.12 следует, что R2 = R1 - B или с учетом (2.4.2)
R2 = N r1 - B. (2.4.5)
Так как векторы R2
коллинеарны, то их векторное произве-
|
|
|
дение
R2 ´ r2 = 0. (2.4.6)
С учетом (2.4.5) выражение (2.4.6) можно представить в виде
(N r - )´ r = N (r ´ r ) - ( ´ r ) = 0
или
1 B 2 1 2 B 2
N (r1 ´ r2 ) = (B ´ r2 ). (2.4.7) выражение (2.4.7) можно представить в виде:


i j k i j k
N X1¢
Y1¢
Z1¢ = B X
B Y B Z
или
X 2¢
Y2¢
Z2¢
X 2¢
Y2¢
Z2¢
N é(Y ¢Z ¢ - Y ¢Z ¢) - ( X ¢Z ¢ - X ¢Z ¢) + ( X ¢Y ¢ - X ¢Y ¢) ù =
ë 1 2 2 1 i 1 2 2 1 j 1 2 2 1 k û
= ( B Z ¢ - B Y ¢) - ( B Z ¢ - B X ¢ ) + ( B Y ¢ - B X ¢ ) , (2.4.8)
|
Y 2
Z 2 i
X 2 Z 2 j
X 2 Y 2 k
где i , j , k — орты, совпадающие с осями координат X, Y, Z системы коор- динат объекта OXYZ; B X , B Y , B Z , X1¢, Y1¢, Z1¢, X 2¢ , Y2¢, Z2¢ — координаты век-
æ X i¢ö
æ x i - x0i ö
торов B, r1, r2 в системе координат объекта OXYZ; ç Y i¢ ÷ = A i ç y i - y0i ÷,
ç ÷ ç ÷
ç Z i¢ ÷ ç -f i ÷
i — номер снимка;
B X = X S
- X ;ü
|
2 1 ï
è ø è ø
B Y = Y S
- Y S ; ý
|
ï
(2.4.9)
B Z = Z S - Z S . ï
2 1 þ
Так как векторы B ´ r2 и r1 ´ r2 коллинеарны (потому, что векторы
|
B, r1, r компланарны), значение N можно найти как отношение их
модулей, то есть
 N = . (2.4.10)
N = . (2.4.10)
в координатной форме выражение (2.4.10) с учетом (2.4.8) имеет вид
 N = . (2.4.11)
N = . (2.4.11)
У коллинеарных векторов отношение их координат равно отноше- нию их модулей, поэтому можно записать:
 N = B Y Z2¢ - B ZY2¢ ;
N = B Y Z2¢ - B ZY2¢ ;
Y1¢Z2¢ - Y2¢Z1¢
N = B X Z2¢ - B Z X 2¢ ;
 X1¢Z2¢ - X 2¢Z1¢
X1¢Z2¢ - X 2¢Z1¢
N = B XY2¢¢ - B Y X 2¢ . (2.4.12)
 X1¢Y2¢ - X 2¢Y1¢
X1¢Y2¢ - X 2¢Y1¢
Таким образом, если известны элементы внутреннего и внешнего ориентирования стереопары снимков и измерены на этих снимках коор- динаты соответственных точек x1, y1 и x2, y2, то сначала надо вычислить по одной из формул (2.4.12) значение скаляра N, а затем по формуле (2.4.4) — координаты точки местности X, Y, Z.