
§2.3. способы измерения координат и параллаксов соответственных точек на стереопаре снимков








Измерения координат соответственных точек на паре снимков осно- ваны на свойствах бинокулярного зрения. Наиболее распространенный способ измерения пары снимков и модели — это способ мнимой марки, предложенный Пульфрихом в 1899 г.
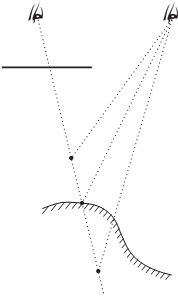
Сущность этого способа состоит в следующем. На пару снимков накладывают две одинаковые по форме и размеру марки m1 и m2 — одну на левый снимок, другую — на правый (рис. 2.8). При стереоскопическом
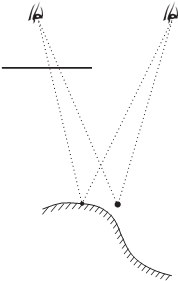 рассматривании снимков и марок наблюдатель видит простран- ственную модель и одну марку вместо двух. Две марки слива-
рассматривании снимков и марок наблюдатель видит простран- ственную модель и одну марку вместо двух. Две марки слива-
ются в нашем зрительном вос- приятии в одну, как сливаются два снимка в одно рельефное изо- бражение. Получаются мнимое изображение местности — с т е - р е о э ф ф е к т и мнимая марка. Изменение положения марок на снимках вызывает простран- ственное перемещение мнимой марки. Благодаря этому мнимую марку можно совместить с любой точкой видимой модели. Если такое совмещение достигнуто, значит действительные марки
P1 m1
a1
a
m
рис. 2.8
m2 P2
a2
 p
p
y
x
рис. 2.9
 y y
y y
 x
x
рис. 2.10
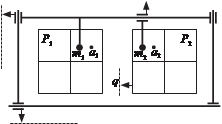
находятся на соответственных точках стереопары. Движения действительных марок фикси- руются, что позволяет измерять координаты и параллаксы точек стереопары (рис. 2.9).
Пусть марки m1 и m2 имеют следующие движения:
1) совместное движение, параллельное оси x;
2) совместное движение, параллельное оси y;
3) движение одной марки относительно другой, параллель- ное оси x;
4) движение одного снимка относительно другого, парал- лельное оси y.
Четырех движений доста- точно для совмещения марки m1 с любой точкой снимка Р1, на-
пример, с точкой а1, и марки m2
 P1 m1
P1 m1
a1
m
m a
m
m2 m2 m2 P2
a2
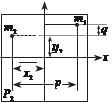
с соответствующей точкой а2 снимка Р2. С помощью движе- ния одной марки относительно
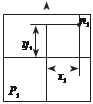
другой вдоль оси x можно изме- рить продольный параллакс р, который равен p = x1 – x2, а с по- мощью движения одной марки относительно другой вдоль оси y можно измерить поперечный (вертикальный) параллакс q, ко- торый равен q = y1 – y2 (рис. 2.10). Изменение расстояни я между действительными марка- ми m1 и m2 вызывает перемеще- ние мнимой марки m по глубине
рис. 2.11
(рис. 2.11). Если расстояние между действительными марками больше расстояния между соответственными точками а1 и а2, то мнимая марка будет дальше точки а модели и наоборот. Если мнимая марка совмещена с точкой а модели, то действительные марки m1 и m2 совмещены с соот- ветствующими точками снимков а1 и а2. Наоборот, если действительные марки наведены на соответствующие точки снимков, то мнимая марка наведена на соответствующую точку модели. Таким образом можно сте- реоскопически опознавать на снимке точку, соответствующую данной точке на другом снимке, даже если эта точка не является контурной.