
Параметры аффинного преобразования a i, b i можно определить по координатам x , y координатных меток снимка, измеренным на циф- ровом изображении, и значениям координат x, y этих меток в системе








координат снимка, полученным при калибровке съемочной камеры. Для определения параметров a i, b i для каждой метки, измеренной на цифровом изображении, составляют уравнения:
 a0 + a1
a0 + a1x + a2y - x = Jx ;üï

(1.10.2)
b +b x + b y - y = J . ý
0 1 2
y ïþ
Полученную систему уравнений решают методом наименьших квадратов и определяют в результате решения значения параметров a i, b i. Для их определения необходимо не менее трех координатных меток, не
лежащих на одной прямой.
в практике фотограмметрии возникает обратная задача: определе- ние значений координат точек в измерительной системе координат по координатам этих точек, заданным в системе координат снимка. Такое преобразование координат выполняется по формулам:
æ x ö = P-1 æ x - a0 ö = æ A1 A2 öæ x - a0 ö
(1.10.3)
ç y ÷ ç y - b ÷ ç B B ÷ç y - b ÷
или
è ø è 0 ø è 1 2 øè 0 ø
x = A1 ( x - a0 ) + A2 (y - b0 );üï
(1.10.4)
 |
y = B ( x - a ) + B (y - b ),ý
1 0 2 0 ïþ
|
где A i, B i – элементы обратной матрицы р .
 y(yc)
y(yc)
y
Для цифровых изображений значение пиксельных координат точек xp, yp определяют по фор- мулам:
3
L y 2 x
x = x ;
 p D
p D
y = y .
 p D
p D
(1.10.5)
L x o' φ 1 4
x(oc)
x(xc)
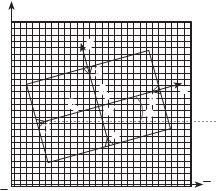
в случае, если при кали- бровке съемочной камеры опре- делялись калиброванные рас- стояния между координатными метками L x, L y (рис. 1.24), для определения координат точек
рис. 1. 24
в системе координат снимка по
измеренным координатам точек в измерительной системе координат используют формулы о р т о г о н а л ь н ы х п р е о б р а з о в а н и й:
x = k x[a1(x - a0 ) + a2 (y - b0 )];
 y = k y[-a2 (
y = k y[-a2 (x - a0 ) + a1(y - b0 )],
(1.10.6)
где a0, b0 — координаты начала системы координат снимка o¢ в измери-
тельной системе координат; a1, a2 — параметры, определяющие разво- рот одной системы координат относительно другой (a1 = cosφ, a2 = sinφ); φ — угол поворота (см. рис. 1.24); k x, k y — коэффициенты деформации снимка по осям x и y.
Параметры внутреннего ориентирования a0, b0, φ, k x, k y определя- ют по измерениям координат координатных меток, a0, b0 вычисляют как координаты точки пересечения прямых линий, проведенных через координатные метки 1–2 и 3–4 по формулам:

 a = (y4 - y1) + c1 x1 - c2 x4 ;
a = (y4 - y1) + c1 x1 - c2 x4 ;

0 c - c
(1.10.7)
1 2
 b0 = y1 + c1(a0 - x1) = y4 + c2 (a0 - x4 ),
b0 = y1 + c1(a0 - x1) = y4 + c2 (a0 - x4 ),
где c
= y2 - y1 ;

c = y3 - y4 .

 1
1 x - x 2 x - x
2 1 3 4
Значение угла φ определяют по формуле
tgj= y2 - y1 .
 x2 - x1
x2 - x1
(1.10.8)
Коэффициенты деформации снимка вычисляют по формулам:

|
k = L x = ;
L x¢
L L
(1.10.9)
k y =
y = y ,

 L y¢
L y¢
где L x, L y — калиброванные значения расстояний между координат-
ными метками; L x¢ , L y¢ — вычисленные значения расстояний между
соответственными координатными метками, на основе измеренных координат этих меток.
Для обратного перехода из системы координат снимка в измери- тельную систему координат используют формулы:
x = a + 1 (a x - a y);
|
0 1 2
x
(1.10.10)
y = b + 1 (a x + a y).
|
0
y
 Если отсутствуют данные о значениях расстояний между координатными метками, опре- деление параметров внутреннего ориентирования производится по формулам (1.10.6). При этом значения коэффициентов дефор- мации принимаются равными k x = k y = 1 для получения коор-
Если отсутствуют данные о значениях расстояний между координатными метками, опре- деление параметров внутреннего ориентирования производится по формулам (1.10.6). При этом значения коэффициентов дефор- мации принимаются равными k x = k y = 1 для получения коор-
динат соответствующих точек x
объекта.
в случае если снимки были получены цифровой камерой, то
2 1
 y(y)
y(y)
рис. 1.25
x(x)
процесс внутреннего ориентирования снимка не выполняется, так как измерения координат точек снимка выполняются непосредственно в системе координат камеры снимка (рис. 1.25).
§1.11. Фотограмметрические сканеры
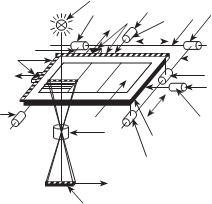
Фотограмметрические сканеры, как и обычные сканеры, пред- назначены для преобразования аналоговых фотоснимков в цифровые изображения. в фотограмметрических сканерах в отличие от обычных с высокой точностью (2–3 мкм) выполняется позиционирование элементов цифрового изображения, что обеспечивает высокую геометрическую точность цифрового изображения. Сканер, принципиальная схема которого представлена на рис. 1.26, состоит из снимкодержателя 1, на который устанавливается снимок 2. Снимкодержатель укреплен на каретках 3, с помощью которых он может перемещаться по направлени- ям 4 осей х и ó. Перемещение снимкодержателя осуществляется с помощью сервоприводов 5, управляемых компьютером. Положение снимкодержателя фиксируется датчиками координат 6, которые связаны посредством интерфейсов с компьютером. Изображение участка снимка, освещаемое источником света 7, проектируется с помощью объектива 8 на линейку 9 или матрицу светоприемных элементов (обычно линейку или матрицу ПЗС). в некоторых сканерах используют несколько пере- крывающихся между собой параллельных линеек ПЗС.
в табл. 1.1 представлены основные характеристики некоторых сканеров.
Сканирование снимка сканером с линейкой ПЗС производится следующим образом. Снимкодержатель со снимком перемещается с
помощью сервопривода с по-
 7
7
3 6 PC 5 PC
x
3 стоянной скоростью вдоль оси
4 ó сканера. Изображение строки
снимка формируется объективом
6 4 4
PC 3
PC
y
3 2 5
B 1
3
PC
9
в плоскости линейки ПЗС. Све- топриемные элементы линейки ПЗС преобразуют световой по- ток в электрические сигналы, интенсивность которых зависит от интенсивности светового по- тока, попавшего на светоприем- ные элементы. Электрические сигналы преобразуются в циф- ровую форму. Таким образом
рис. 1.26
Т а б л и ц а 1.1
Характеристики фотограмметрических сканеров
| Характеристика | UltraScan 5000 | PhotoScan PS2002 Z/I Imaging | DSW 500 LH System | Delta-Scan Geosystem |
| Тип сенсора, пиксель | 3 линейки, 6000 | 3 линейки, 5632 | Матрица, 1032×1536 | 3 линейки, 5300 |
| Формат, мм | 280×440 | 275×250 | 265×265 | 320×320 |
| Размер пикселя | 12 | 7 | 9 | 8 |
| Геометрическая точность, мкм | 2 | 2 | 2 | 3 |
| Фотометрическое разрешение, бит | 16 | 10 | 10 | 12 |
| Цвет (R, G, B) | Да | Да | Нет | Да |
| Диапазон яркости | 3,5D | 3,3D | 2,5D | 2,7D |
| Скорость сканирования, Мбайт/с | 0,14 | 0,43 | 1,42 | 1,09 |
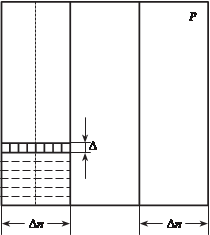 формируется строка цифрового изображения полосы снимка (рис. 1.27). Строки цифрового изображения формируются через временные интер- валы, соответствующие перемещению линейки на расстояние равное проекции ширины линейки ПЗС на снимке ∆. После формирования цифрового изображения полосы снимкодержатель перемещается по оси х на величину ∆n — проекции длины линейки на снимок (n — чис- ло элементов в линейке ПЗС) и повторяется процесс формирования цифрового изображения следующей полосы снимка. Из цифровых изо- бражений полос формируется общее
формируется строка цифрового изображения полосы снимка (рис. 1.27). Строки цифрового изображения формируются через временные интер- валы, соответствующие перемещению линейки на расстояние равное проекции ширины линейки ПЗС на снимке ∆. После формирования цифрового изображения полосы снимкодержатель перемещается по оси х на величину ∆n — проекции длины линейки на снимок (n — чис- ло элементов в линейке ПЗС) и повторяется процесс формирования цифрового изображения следующей полосы снимка. Из цифровых изо- бражений полос формируется общее
цифровое изображение снимка.
в сканерах с матрицей ПЗС общее цифровое изображение сним- ка формируется из цифровых изо- бражений участков снимка, фор- мируемых матрицей ПЗС. Каждый участок цифрового изображения формируется при неподвижном снимкодержателе. Переход на смеж- ный участок снимка производится перемещением снимкодержателя соответственно по осям х и ó на ве- личину проекции на снимке длины
или ширины матрицы (рис. 1.28).
рис. 1.27
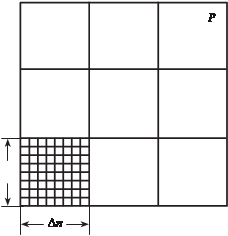
 рис. 1.28
рис. 1.28
Качество цифрового изо- бражения, сформированного в результате сканирования, опре- деляется его геометрическим и радиометрическим (фото- метрическим) разрешением. Геометрическое разрешение определяется размером пикселей цифрового изображения, а радио- метрическое — количеством отображаемых оттенков серого при формировании черно-бело- го изображения и интенсивно- сти каждого из трех основных цветов цветного изображения. Радиометрическое разрешение
|
определятся в битах. При разрешении в 8 бит различают 256 оттенков от 0 до 255 и цифровую форму.
 |
Глава 2
 |
Теория пары кадровых снимков
§2.1. основы стереоскопического зрения
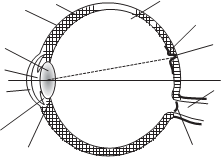 На рис. 2.1 схематически представлено устройство глаза человека. Глаз имеет форму, приближающуюся к шару с радиусом около 12 мм. Поверхность глаза состоит из трёх оболочек. Наружная защитная обо- лочка глаза (ск л е р а) 1 в передней своей части переходит в тонкую и прозрачную р о г о в и ц у 10. Под склерой находится с о с у д и с т а я о б о л оч к а 2, переходящая в непрозрачную р а д у ж н у ю о б о л о ч - к у 9, которая имеет красящие вещества (п и г м е н т ы), определяющие цвет глаз. Спереди радужной оболочки находится з р а ч о к 11 (отверстие с изменяющимся в пределах 2–8 мм диаметром). Зрачок играет роль диафрагмы и регулирует количество поступающих в глаз световых лучей. Третья (внутренняя) оболочка 3 называется с е т ч а т к о й и состоит из ф о т о р е ц е п т о р о в — светочувствительных элементов (ко л б о ч е к и п а л о ч е к), передающих раздражение от падающего на них света через нервную систему в мозг. Палочки чувствительны к слабому сумеречному освеще-
На рис. 2.1 схематически представлено устройство глаза человека. Глаз имеет форму, приближающуюся к шару с радиусом около 12 мм. Поверхность глаза состоит из трёх оболочек. Наружная защитная обо- лочка глаза (ск л е р а) 1 в передней своей части переходит в тонкую и прозрачную р о г о в и ц у 10. Под склерой находится с о с у д и с т а я о б о л оч к а 2, переходящая в непрозрачную р а д у ж н у ю о б о л о ч - к у 9, которая имеет красящие вещества (п и г м е н т ы), определяющие цвет глаз. Спереди радужной оболочки находится з р а ч о к 11 (отверстие с изменяющимся в пределах 2–8 мм диаметром). Зрачок играет роль диафрагмы и регулирует количество поступающих в глаз световых лучей. Третья (внутренняя) оболочка 3 называется с е т ч а т к о й и состоит из ф о т о р е ц е п т о р о в — светочувствительных элементов (ко л б о ч е к и п а л о ч е к), передающих раздражение от падающего на них света через нервную систему в мозг. Палочки чувствительны к слабому сумеречному освеще-
нию, колбочки — к дневному, яркому свету и обладают цве- точувствительностью. Место вхождения зрительного нерва 6 в сетчатку носит название с л е - п о г о п я т на 7, так как оно не имеет колбочек и палочек, а следовательно, и не реагирует на световое раздражение. в середи- не сетчатки напротив зрачка на-
1 2 3
4
12 5
11
10 13 6
9
8 7
рис. 2.1
ходится ж ё л т о е п я т н о 4, являющееся наиболее чувствительной частью сетчатки. Центральное углубление жёлтого пятна 5 состоит из одних колбочек. Диаметр впадины жёлтого пятна составляет примерно 0,4 мм, диаметр колбочки приблизительно 2 мкм.
За зрачком расположен х р у с т а л и к 12, представляющий собой двояковыпуклую линзу. Он строит на сетчатке действительное, умень- шенное и обратное изображение наблюдаемого объекта. Таким образом, его назначение аналогично объективу фотокамеры. Сетчатка играет такую же роль, что и светоприемная матрица в цифровой фотокамере. Резкость изображения на сетчатке достигается посредством аккомода- ции хрусталика (изменение его кривизны, происходящее рефлекторно). Чем ближе находится рассматриваемый предмет, тем большей должна быть кривизна поверхности хрусталика. аккомодацию осуществляют глазные мышцы 8. Они не напряжены, если рассматриваемый объект находится в бесконечности (более 10 м). При этом фокусное расстояние хрусталика равно приблизительно 16 мм. Но при наблюдении на таком расстоянии упускаются мелкие детали. Оптимально, когда и детали видны и мышцы не очень напряжены. Такие условия для нормального глаза выполняются на расстоянии наилучшего зрения (около 25 см). Про- странство между роговицей и хрусталиком наполнено «в о д я н и с т о й в л а г о й», а между хрусталиком и сетчаткой — «с т е к л о в и д н о й в л а г о й» 13, их коэффициенты преломления примерно равны между собой.
луч, проходящий через центр впадины жёлтого пятна и заднюю узловую точку оптической системы глаза, называется зрительной осью глаза, а прямая, проходящая через центры кривизны поверхностей роговицы и хрусталика — его оптической осью. Угол между этими осями равен 5°. Поле зрения неподвижного глаза составляет 150° по горизонтали и 120° по вертикали. в его разных частях изображение воспринимается с различной чёткостью. лучше видны те предметы, которые попадают на центральную ямку сетчатки. Угол, под которым виден диаметр центральной ямки жёлтого пятна из узловой точки хру- сталика, называется у г л о м о т ч ё т л и в о г о з р е н и я, он равен 1,5°. Существует статистическая и динамическая теории зрения. в со- ответствии с динамической теорией большую роль при рассматривании предметов играют движения глаз. Они бывают произвольными (зависят от воли человека) и непроизвольными (физиологические нистагмы). Не-
произвольными движениями глаз сканирует изображение, построенное хрусталиком. Н е п р о и з в о л ь н ы е д в и ж е н и я включают в себя:
д р о ж ь — колебание глаз со скоростью 20¢ в секунду с ампли- тудой 10–20²;
к о л е б а н и я — быстрые вращения со скоростью примерно 6000¢ в секунду с амплитудой 1–25¢, происходят не регулярно с интервалами 0,05–5 с;
м е д л е н н ы е д в и ж е н и я со скоростью 1¢ в секунду с ампли- тудой до 5¢.
Различают два вида зрения: монокулярное и бинокулярное. Зрение одним глазом называется м о н о к у л я р н ы м з р е н и е м. Наблюдатель обычно подсознательно поворачивает глаз так, чтобы изображение объ- екта оказалось на углублении жёлтого пятна. Пересечение зрительной оси глаза с рассматриваемым объектом называется т о ч к о й ф и к с а - ции F монок у л я р ног о з р е н и я.
Для оптических наблюдений и измерений важную роль играет острота зрения, т.е. способность невооружённого глаза воспринимать две расположенные рядом точки или линии как разные элементы. Минимальный угол, под которым наблюдатель ещё видит раздельно две светящиеся точки, называется о с т р о т о й м о н о к у л я р н о г о з р е н и я п е р в о г о р о д а. Для нормального глаза этот угол равен примерно 45², но он зависит от многих факторов (дифракция, аберра- ции, освещение, тип тест-объекта, длина волны и т.д.) и колеблется в пределах 0,5²–10¢.
О с т р о т о й монок у л я р ног о з р е н и я в т о р ог о р о д а называется минимальный угол, под которым человеческий глаз видит раздельно две параллельные линии. Она выше, чем острота монокулярного зрения первого рода и примерно равна 20². Это объ- ясняется тем, что изображение линий воспринимается не одной, а целой группой колбочек. Существует понятие стереоскопического (пространственного) восприятия объектов. Оно может быть моноку- лярным и бинокулярным. При монокулярном зрении об удалённости наблюдаемых предметов можно судить только по косвенным при- знакам (относительный размер предметов, свет и тени, перекрытия, перспектива, визуальные контрасты, параллакс движений, детальность изображений и т.д.). Указанные признаки оценки пространственной глубины при монокулярном зрении дают приближённое, а иногда не- верное представление о расстояниях.
 A
A
f1
рис. 2.2
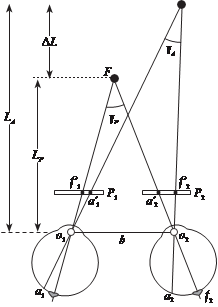
Стереоскопическое зрение это пространственное восприя- тие, возникающее при рассмат- ривании объекта двумя глазами. Такое наблюдение называется б и н о к у л я р н ы м з р е н и - е м. в этом случае наблюдатель устанавливает глаза таким об- разом, чтобы изображение объ- екта оказалось в центральных
ямках f1 и f2 сетчаток обоих глаз (рис. 2.2). Поэтому зрительные оси глаз пересекаются в том
месте объекта, которое наблю- датель желает отчётливо рас- смотреть. Точка пересечения зрительных осей называется т о чк о й ф ик с а ции F бино- кулярного зрения. Расстояние b между центрами хрусталиков левого и правого глаз — это глаз-
ной базис. Он у людей разный и колеблется в пределах от 55 до 72 мм. Угол γF, под которым пересекаются зрительные оси, называется углом к о нв е р г е нции (сходимости). величина угла конвергенции зависит
от отстояния L точки F. Эта зависимость выражается приближённым уравнением
 gF = b L. (2.1.1)
gF = b L. (2.1.1)
Размеры жёлтого пятна позволяют увидеть при данном положении глаз и другие точки. Изображения а1 и а2 точки А объекта, полученные на сетчатках глаз, называются соответственными точками, а лучи О1а1 и О2а2 — соответственными лучами (см. рис. 2.2). Угол γA, под которым пересекаются соответственные лучи, называется п а р а л л а к т и ч е - с к и м углом. Неравенство углов γF и γA вызывает неравенство дуг f1a1 и f2a2, полученных в пределах жёлтого пятна левого и правого глаз. алгебраическая их разность называется ф и з и о л о г и ч е с к и м п а - р а л л а к с о м и обозначается р, т.е.
p = Èf1a1 - Èf2a2. (2.1.2)
Дуга считается положительной, если она находится слева от цен- тральной ямки. Наличие физиологического параллакса является при- чиной пространственного восприятия при стереоскопическом зрении. абсолютная величина угла конвергенции ощущается при этом с невы- сокой точностью, поэтому и отстояние наблюдаемой точки определяется приближённо. в то же время изменения величин параллактических углов относительно угла конвергенции воспринимаются с высокой точностью. Это обстоятельство позволяет определить изменения от- стояний других точек относительно точки фиксации также с высокой точностью. Установлено, что разность отстояний воспринимается че-

 ловеком, когда dg = gF - g £ 70¢. Если это условие не выполняется, то он меняет точку фиксации.
ловеком, когда dg = gF - g £ 70¢. Если это условие не выполняется, то он меняет точку фиксации.
Для определения соотношения между изменениями расстояния и угла конвергенции в соответствии с (2.1.1) запишем:

 DL = -bDg g2 = -L2Dg b. (2.1.3)
DL = -bDg g2 = -L2Dg b. (2.1.3)
Существует понятие г о р о п т е р. Это геометрическое место точек в пространстве, которые при заданном положении точки фиксации дают изображение на симметричных точках фиксации. Для всех остальных точек, в указанных выше пределах, и возникает физиологический параллакс. Наименьшее значение Δγ (или физиологического параллак- са р), при котором ещё ощущается разность расстояний ΔL, называют остротой или р а з р е ш а ющ е й с по с о бно с т ь ю с т е р е о с к о - п и ч е с к о г о з р е н и я.
О с т р о т а с т е р е о с к о п и че с к ог о з р е н и я п е р в ог о р о д а — это минимальная разность параллактических углов двух точек, при которой ещё воспринимается разность отстояний. Она при- мерно равна 30².
О с т р о т а с т е р е о с к о п и ч е с к о г о з р е н и я в т ор о г о р о д а — это минимальная разность параллактических углов для двух вертикальных прямых, при которой ещё замечается разность их от- стояний. Она равна 10². Эти характеристики меняются в зависимости от индивидуальных особенностей наблюдателя, а также от условий наблюдения — освещённости, контрастности объектов, их формы и т.п. Используя понятие остроты стереоскопического зрения, по форму-
ле (2.1.1) можно определить р а д и у с R н е в о о ру ж е н ног о би -
нок у л я р ног о з р е н и я. Так, приняв γF = 30² и b = 65 мм, получим:
R =(65 мм´200 000²)/30² = 430 м. Если для наблюдения объектов исполь- зовать бинокли или стереотрубы, у которых искусственно увеличен глазной базис (обозначим его буквой B), и использованы оптические системы увеличения (V ), возрастает и радиус стереоскопического зрения в ω = (BV )/b раз. величину ω называют к о э ф ф и ц и е н т о м п л а с т и ч н о с т и прибора.