
§1.5. Формулы связи координат соответственных точек местности и горизонтального снимка








У горизонтального снимка угловые элементы внешнего ориентиро- вания w= a= κ= 0. Будем считать, что координаты главной точки снимка x0 = y0 = 0. в этом случае
æ 1 0 0 ö
A = AT = E = ç 0 1 0 ÷. (1.5.1)
ç ÷
ç 0 0 1 ÷
è ø
Формулы связи координат (1.4.6) и (1.4.12) при этом будут иметь вид
X = X
- Z - Z S x;ü

S
Y = Y S -
f ïï
|
Z - ZS y; ï
f ïþ
(1.5.2)
x =- f
( X - X
);ü
Z - Z S
S ïï
ý
(1.5.3)
y =- f (Y - Y ). ï
S
Z - Z S þ
Если в качестве начала системы координат объекта OXYZ выбрать центр проекции S, то X s = Y s = Z s = 0, а формулы (1.5.2) и (1.5.3) примут вид:
 |
X =- Z x = H x;ü
f f ïï
Z H ý
(1.5.4)
|
Y =- y = f
y; ï
f þ
 |
x =- f X = f X ;ü
Z H ïï
(1.5.5)
y =-
ý
f Y = f Y, ï


Z H ïþ
где H = –Z — высота фотографирования над определяемой точкой.
Из формул (1.5.4) и (1.5.5) следует, что горизонтальным снимком горизонтальной местности можно пользоваться как планом масштаба
1 = f .
m H
§1.6. влияние погрешности определения высот точек местности на точность определения их плановых координат по одиночному снимку
Рассмотрим влияние по- грешностей определения высот точек на точность определения их плановых координат по оди- ночному снимку. На рис. 1.15 снимок P, полученный из центра проекции S, на котором точка местности M изобразилась в точке m. Плоскость E — гори- зонтальная плоскость, прове- денная через точку местности M. Точки N и n — точки надира со- ответственно на местности и на снимке.
S
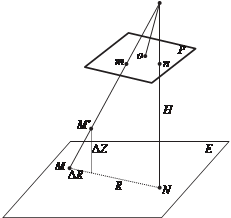 рис. 1. 15
рис. 1. 15
Если высота точки М определена с погрешностью ΔZ , то положение точки М определяется как точка пересечения проектирующего луча Sm и горизонтальной плоскости, параллельной плоскости E и расположен- ной выше ее на величину ΔZ. Тогда ошибка в опредеелении планового положения точки М будет определяться величиной ΔR (см. рис. 1.15) относительно точки надира N. Если предположить, что снимок гори- зонтальный, то точка надира n совпадает с главной точкой о, а величину ΔR можно вычислить по формуле, полученной на основе (1.5.4):
 DR = DX 2 + DY 2 , (1.6.1)
DR = DX 2 + DY 2 , (1.6.1)
где DX = x DZ ;
f
DY = y DZ ; x, y — координаты точки m; f — фокусное
f
расстояние снимка.