
§1.3. системы координат объекта. Элементы внешнего ориентирования съемочной камеры








При решении фотограмметрических задач по снимкам положение точек объекта (местности) и съемочной камеры в момент получения снимка определяют в прямоугольной пространственной системе коорди- нат объекта OXYZ. в качестве этой системы координат при выполнении фотограмметрических работ по созданию карт и других документов о местности обычно используют геоцентрическую или топоцентрическую систему координат. Так как топографические карты и другие документы о местности создаются в государственных или местных картографиче- ских системах координат (в России в системах координат СК 42, СК 95 и Балтийской системе высот), в процессе фотограмметрической обработки
снимков её результаты преобразуют в государственные или местные системы координат и высот.
При фотограмметрической обработке снимков используют также прямоугольные системы координат, связанные с характерными точ- ками снимаемого объекта. Такие системы применяют в тех случаях, когда нет необходимости отображать объекты в государственных си- стемах координат, например, при съемке архитектурных сооружений и документации дорожных происшествий. Положение и ориентацию системы координат съёмочной камеры в системе координат объекта OXYZ определяют э л е ме н т ы в не ш не г о о р ие н т и р о в а н и я с ъ е м о ч н о й к а м е р ы. Положение центра проекции S в системе координат объекта определяют его координаты X s, Y s, Z s.
Угловая ориентация системы координат съемочной камеры от-
носительно системы координат объекта определяется ортогональной матрицей
æ a11
a12
a13 ö
æ cos Xx
cos X y
cos Xz ö
|
|
|
A = ç a21
a22
a23 ÷ = ç cosYx
cosY y
cosYz ÷.
(1.3.1)
|
ç
è a31
a32
÷
a33 ø
ç
è cos Zx
cos Z y
÷
cos Zz ø
в матрице а элементы (направляющие косинусы) а ij являются косинусами пространственных углов между осями системы координат объекта OXYZ и снимка Sx yz. Направляющие косинусы являются коор-
динатами единичных векторов (ортов), совпадающих с осями координат съемочной камеры в системе координат объекта.
вследствие особых характеристик ортогональной матрицы, како- вой является матрица направляющих косинусов
æ 1 0 0 ö
A-1 = AT ; AT A = Eç 0 1 0 ÷,
ç ÷
ç 0 0 1 ÷
è ø
поэтому в матрице направляющих косинусов независимы только три элемента, следовательно, элементы этой матрицы являются функцией трех параметров. в качестве этих параметров в фотограмметрии наи- более часто используют углы – w, a и κ, которые называют у г л о в ы - м и э л е ме н т а м и в не ш не г о о р ие н т и р о в а н и я съемочной камеры. Последовательно поворачивая систему координат объекта OXYZ вокруг ее осей на эти углы, можно ориентировать ее параллельно
осям системы координат съемочной камеры. При этом последователь- ность и направление вращений могут быть произвольными. Поэтому в фотограмметрии используют различные системы угловых элементов ориентирования съемочной камеры.
Рассмотрим наиболее широко используемую систему угловых эле- ментов ориентирования съемочной камеры, в которой система координат объекта OXYZ поворачивается последовательно против часовой стрелки (правые углы) вокруг осей X, Y и Z
 соответственно на углы w, a и κ. Z
соответственно на углы w, a и κ. Z
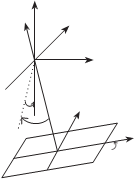
Геометрическая интерпретация z Y
угловых элементов внешнего
ориентирования показана на S X
рис. 1.10, здесь w — поперечный
угол наклона (угол в координат-
ной плоскости YZ между осью Z ω y
и проекцией оси z на плоскость α x
YZ); a — продольный угол на- клона (угол между проекцией оси z на плоскость YZ и осью z); κ — угол разворота снимка (угол в плоскости снимка Р между следом сечения этой плоскости
плоскостью Xz и осью х снимка). O
Значение элементов a ij ма-
κ
 o
o
X
рис. 1.10
трицы а можно получить путем последовательного перемножения матриц, составленных для последовательных поворотов системы коор- динат объекта ОХYZ на углы w, a и κ. в результате поворота системы координат ОХYZ или, что то же самое, системы координат SXYZ на угол w эта система преобразуется в систему координат SX′Y′Z′ (рис. 1. 11).
в соответствии с выражением (1.3.1) матрица
æ cos 0°
cos 90°
cos 90° ö æ 1 0 0 ö
A = ç cos 90°
cosw
cos (90° + w)÷ = ç 0
cos w
-sin w÷.
w ç
|
ç cos 90°
cos(90° - w)
cos w
÷ ç
|
|
ø ç sin w
÷
|
cosw ÷
|
в результате поворота на угол a система координат SX′Y′Z′ преоб- разуется в систему координат SX″Y″Z″ (рис. 1.12).
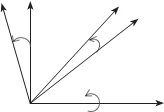 Z' Z Y'
Z' Z Y'
Y
ω ω
Z' Z''
 α
α
Y'(Y'' )
α
ω S
S X(X' )
X'
α
X''
рис. 1. 11
в соответствии с выражением (1.3.1) матрица
рис. 1. 12
æ cos a
cos 90°
cos (90° - a)ö
æ cos a
0 sin a ö
A = ç cos 90°
cos 0°
cos 90°
÷ = ç 0 1 0 ÷.
a ç
|
ç cos (90°+ a)
cos 90°
cos a
÷ ç
|
|
÷ ç -sin a
÷
|
0 cosa÷
в результате поворота системы координат SX″Y″Z″ на угол κ эта система преобразуется в систему координат съемочной системы Sx yz (рис. 1.13).
в соответствии с выражением (1.3.1) матрица
æ cos k
cos(90°+ k)
cos 90°ö æ cos k
-sin k 0 ö
A = ç cos (90°- k)
cos k
cos 90°÷ = ç sin k
cos k 0 ÷.
k ç
|
ç cos 90°
cos 90°
÷
|
cos 0° ÷
ç ÷
|
|
ç 0 0 1 ÷
в результате перемножения матриц
A = AwAa Ak = Awa Ak,
получим значения элементов a ij, как функции углов w, a и κ:
a11 = cos acos k; a12 = -cosasin k; a13 = sin a;ü
a21 = sin wsin a cos k + coswsin k; ï
a = -sin wsin asin k + coswcos k; ï
22
a23 = -sin wcosa;
a31 = - cos wsin a cos k + sin wsin k; a32 = cos wsin asin k + sin wcos k; a33 = cos wcosa.
ï
ý (1.3.2)
ï
ï
ï
ï
Если известны значения направляющих косинусов a ij, то из выражений (1.3.2) можно полу- чить значения углов w, a, κ:
w = arctg æ - a23 ö;ü

Z''(z)
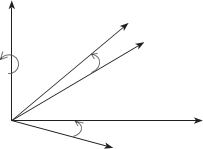 κ
κ
y
Y''
κ
ç a ÷ ï
|
è 33 ø ï
a = arcsin (a13 ); ý (1.3.3) S κ x
æ a ö ï
X''
k = arctg ç - 12 ÷. ï
è a11 ø ïþ
рис. 1. 13
§1.4. Формулы связи координат соответственных точек снимка и местности
Пусть из точки S получен снимок Р, на котором точка М местно- сти изобразилась точкой m. Найдем зависимости между координатами
этих точек. Положение точки М местности в си_стеме координат объекта
 |
OXYZ определяет вектор R M
|
OM .
вектор R S
= OS
определяет поло-
 |
жение цент ра п р оекции S в системе координат объекта OXYZ. векторы
r_ = Sm и R = SM определяют соответственно положение точек m и М
относительно центра проекции S. Из рис. 1.14 следует, что
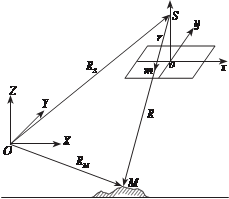 R M = R S + R. (1.4.1) z
R M = R S + R. (1.4.1) z
векторы R и r коллине-
арные, поэтому можно записать:
|
R = N r , (1.4.2)
где N — скалярная величина.
С учетом (1.4.2) выражение (1.4.1) имеет вид
R M = R S + N r. (1.4.3)
в координатной форме вы- ражение (1.4.3) имеет вид
рис. 1. 14
æ X ö æ X S ö æ X ¢ö
ç Y ÷ = ç Y S ÷ + N ç Y ¢ ÷
ç ÷ ç ÷ ç ÷
ç Z ÷ ç Z S ÷ ç Z ¢ ÷
или
è ø è ø è ø
X = X S + NX ¢;ü
|
ï
Y = Y S + NY ¢;
(1.4.4)
|
Z = Z S + NZ ¢. ï
в выражении (1.4.4) X, Y, Z — координаты точки М в системе ко- ординат объекта; X S, Y S, Z S — координаты центра проекции S в системе координат объекта; X′, Y′, Z′ — координаты вектора r в системе коор- динат объекта. Очевидно, что
æ X ¢ö æ x - x0 ö
ç Y ¢ ÷ = A ç y - y0 ÷, (1.4.5)
ç ÷ ç ÷
ç Z ¢ ÷ ç -f ÷
è ø è ø
где а — матрица преобразования координат, элементы a ij которой опре- деляются по значениям угловых элементов внешнего ориентирования снимка w, a, κ.
Из третьей формулы выражения (1.4.4) следует, что
 N = Z - Z S .
N = Z - Z S .
Z ¢
Подставив значение N в первые две формулы выражения (1.4.4), получим формулы связи координат соответственных точек местности и снимка
X = X
+ (Z - Z
) X ¢ ;ü
S S Z ¢ ïï
Y ¢ ý
(1.4.6)
|
Y = Y S + (Z - Z S ) Z ¢ , ï
которые с учетом (1.4.5) имеют вид:
X = X
+ (Z - Z
) a11(x - x0 ) + a12 (y - y0 ) - a13f ;ü

S S a
(x - x ) + a
(y - y ) - a
f ïï
Y = Y
+ (Z - Z
31 0 32 0 33 ý
) a21(x - x0 ) + a22 (y - y0 ) - a23f . ï

(1.4.7)
S S a (x - x ) + a (y - y ) - a f ï
31 0 32 0
33 þ
Из формул (1.4.6) следует, что координаты точки местности можно получить по координатам ее изображения на снимке, если известны элементы внутреннего и внешнего ориентирования снимка и высота Z этой точки. Найдем формулы связи координат соответственных точек снимка и местности, которые позволят вычислить координаты изобра- жения точки на снимке в системе координат снимка по координатам соответственной точки местности, определенным в системе координат объекта OXYZ.
|
|
Из выражения (1.4.3) следует, что
|
r = 1 (
). (1.4.8)
в координатной форме выражение (1.4.8) имеет вид
æ x - x o ö æ x* ö
ç y - y
÷ = 1 ç y* ÷
ç o ÷ N ç ÷
ç -f ÷ ç z* ÷
или
è ø è ø
x = x
+ 1 x*; ü
0
y = y0
N
+ 1
N
ï
ï
|
y*; ï
ï
(1.4.9)
|
-f = 1 z*.
N þ
в выражении (1.4.9) x*, y*, z* — координаты вектора стеме координат снимка Sx yz.
R M - R S
в си-
æ x* ö æ X - X S ö
ç y* ÷ = AT ç Y - Y ÷.
(1.4.10)
ç ÷ ç S ÷
ç z* ÷
ç Z - Z S ÷
è ø è ø
Из третьего выражения (1.4.9) следует, что
1 =- f .

 Подставив значение 1
Подставив значение 1
N
N z*
в первые два уравнения выражения (1.4.9),
получим формулы связи координат соответственных точек снимка и местности:
 |
x = x - f x* ; ü
0 z* ïï

|
y* ý
(1.4.11)
y = y0 - f
которые с учетом (1.4.10) имеют вид
z* ,ï
x = x
- f a11( X - X S ) + a21(Y - Y S ) + a31(Z - Z S ) ;ü

0 a ( X - X ) + a
(Y - Y ) + a
(Z - Z
) ïï
13 S 23
S 33
S ý (1.4.12)
y = y
- f a12 ( X - X S ) + a22 (Y - Y S ) + a32 (Z - Z S ) .ï

0 a ( X - X ) + a
(Y - Y ) + a (Z - Z ) ï
13 S 23
S 33 S þ
Формулы (1.4.12) в фотограмметрии часто называют у р а в н е н и -
ями к о л лин е а р н о с т и.