
§1.2. системы координат кадровой съемочной камеры (снимка).








Элементы внутреннего ориентирования кадровой съемочной камеры (снимка)
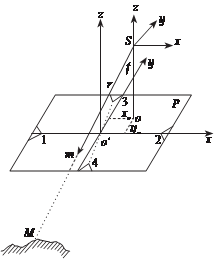
Координаты изображений точек местности на снимках (х, ó, z = 0) определяются в правой пространственной прямоугольной системе ко- ординат съемочной камеры o¢x yz. Эта система координат в аналоговых съемочных камерах задается координатными метками, расположен- ными в плоскости прикладной рамки камеры (рис. 1.9, а), которые впечатываются в каждый снимок. Ось х этой системы проходит через координатные метки 1–2 и направлена по направлению полета. На- чалом системы координат является точка о¢, получаемая в результате пересечения оси х с линией, проведенной через координатные метки 3 и 4. Ось y лежит в плоскости снимка Р и перпендикулярна к оси х, а ось z дополняет систему до правой.
 z
z
 y
y
S x
z
y f
r
x o o P
y o 2
m o' x
M
а б
рис. 1.9
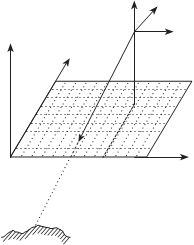
в цифровых съемочных камерах система координат o¢x yz задается светоприемной матрицей. Оси х и ó системы координат o¢x yz, в этом случае, параллельны соответственно строкам и столбцам светоприем- ной матрицы, образуя правую прямоугольную систему координат, а ее начало совмещают с левым нижним углом матрицы, центром ее левого нижнего пикселя или центром матрицы (рис. 1.9, б). Ось х этой системы направлена по направлению полета.
любая точка снимка, например, m, (см. рис. 1.9) имеет в системе координат съемочной камеры координаты m(х, ó, z =0). Центр проекции S в этой системе имеет координаты S(x=x о, y=y о, z=f ). Здесь f — фокусное
расстояние съемочной камеры, а х о и ó о — координаты главной точки
снимка о.
|
Для восстановления связки проектирующих лучей, сформировав- ших снимок в системе координат o¢x yz, необходимо для каждой точки
снимка определить координаты вектора Sm = r в этой системе коорди-
нат по измеренным на снимке координатам точки m:
æ x m ö æ x s ö æ x ö æ x0 ö æ x - x0 ö
r = ç y m ÷ - ç y s ÷ = ç y ÷ - ç y0 ÷ = ç y - y0 ÷. (1.2.1)
ç ÷ ç ÷ ç ÷ ç ÷ ç ÷
çè z m ÷ø
çè z s ÷ø
çè 0 ÷ø
èç f ÷ø
ç -f ÷ø
Наиболее часто в практике фотограмметрии используют систему координат съемочной камеры Sx yz, началом координат которой являет- ся центр проекции S, а оси координат параллельны соответствующим осям системы координат o¢x yz. Так как система координат Sx yz парал- лельна системе координат o¢x yz координаты векторов в обеих системах координат равны, т.е. координаты вектора r в системе координат Sx yz определяются выражением (1.2.1).
Из выражения (1.2.1) следует, что для восстановления связки про- ектирующих лучей необходимо измерить координаты точки и знать значения координат центра проекции S в системе координат o¢x yz — f, х о и y о, которые называются э л е м е н т а м и в н у т р е н н е г о о р и - е н т и р о в а н и я с ъ е м о ч н о й к а м е р ы. К элементам внутреннего ориентирования также относятся параметры радиальной и тангенци- альной фотограмметрической дисторсии объектива съемочной камеры. Для определения поправок в координаты х и ó изображений точек, исключающих влияние фотограмметрической дисторсии, часто ис-
пользуются уравнения
d x = x(r2k1 + r4k2 + r6k3 + ...) + (r 2 + 2x2 ) p1 + 2x yp2 ;
|
d = y(r 2k1 + r 4k2 + r6k3 + ...) + 2x yp1 + (r 2 + 2y2 ) p2 ,
(1.2.2)
в которых r =
(x - x0 )2 + (y - y0 )2 ;
k , k , k
— коэффициенты ради-
1 2 3
 альной дисторсии; p1, p2 — коэффициенты тангенциальной дисторсии. При наличии дисторсии объектива координаты вектора r опре-
альной дисторсии; p1, p2 — коэффициенты тангенциальной дисторсии. При наличии дисторсии объектива координаты вектора r опре-
деляют по формуле
æ x - x0 + d x ö
|
|
r = ç y - y0 + d ÷. (1.2.3)
ç - f ÷ø
Значения элементов внутреннего ориентирования съемочной си- стемы и коэффициенты фотограмметрической дисторсии определяют в процессе проведения фотограмметрической калибровки съемочных камер.
Необходимо отметить, что в фотограмметрической литературе наряду с терминами — э л е м е н т ы в н у т р е н н е г о и в н е ш н е - г о ор и е н т и р о в а н и я с ъ е м о ч н о й к а м е р ы широко исполь- зуются термины — э л ем ен т ы в н у т р ен н ег о и в н еш н ег о о р и е н т и р о в а н и я с н и м к а. Использование этих терминов сло- жилось исторически, хотя с точки зрения строгой теории целесообразно пользоваться терминами — элементы внутреннего и внешнего ориен- тирования съемочной камеры.