
Требования к методическому обеспечению








Нормативно-техническая документация системы должна соответствовать ГОСТ Р 51387-99 “Нормативно-методическое обеспечение” .
Требования к документации
Техническая и программная документация должна быть выполнена на русском языке и с учетом требований ЕСКД ГОСТ 2.601-2006 “ Единая система конструкторской документации. Эксплуатационные документы”, СНИП 10-01-94 “Система нормативных документов в строительстве. Основные положения”, ISO 9001:2008 “Руководство по требованиям к документации”.
Порядок контроля и приемки системы.
Виды и объем испытаний системы:
Система подвергается испытаниям следующих видов:
-предварительные испытания
-опытная эксплуатация
-приемочные испытания.
Источники разработки
Настоящее Техническое Задание разработано на основе следующих документов и информационных материалов:
- ГОСТ 34.602-89 «Комплекс стандартов на автоматизированные системы. Техническое задание на создание автоматизированной системы».
- ГОСТ 24.701-86 «Надежность автоматизированных систем управления».
- ГОСТ 12.1.004-91 «ССБТ. Пожарная безопасность. Общие требования».
- РД 50-34.698-90. Методические указания.
- СНиП 3.05.07-85 “Системы автоматизации”.
Введение
В настоящее в промышленности, науке и в социальной сфере существуют проблемы, требующие эффективных решений. А именно к таким проблемам относятся освобождение человека от монотонного однообразного труда не требующего высокой квалификации, от труда связанного с переносом тяжестей, работой с высокими напряжениями, работой с электромагнитным излучением, высокими, в химически, физически и биологически агрессивных средах. Решение этих проблем возлагается на робототехнику.
В нынешнее время одними из наиболее часто применяемых роботов являются роботы манипуляторы довольно способные выполнять действия подобные некоторым действиям человека.
Промышленный робот - автоматическая машина, состоящая из манипулятора и устройства программного управления его движением, предназначенная для замены человека при выполнении основных и вспомогательных задач производства.
Манипулятор - совокупность пространственного рычажного механизма и системы приводов, осуществляющая под управлением программируемого автоматического устройства или человека-оператора действия (манипуляции), аналогичные действиям руки человека.
Пневматические приводы находят широкое применение в промышленности благодаря их достоинствам: простота реализации линейных перемещений, неприхотливость, высокая скорость перемещений, относительно невысокая стоимость, малые габариты исполнительных устройств. Одно из применений пневматических приводов – пневматические манипуляторы. Типовые операции, которые выполняют такие манипуляторы: подача на обработку и съем изделий в станках, автоматическая сборка и т.д.
Блок схема устройства
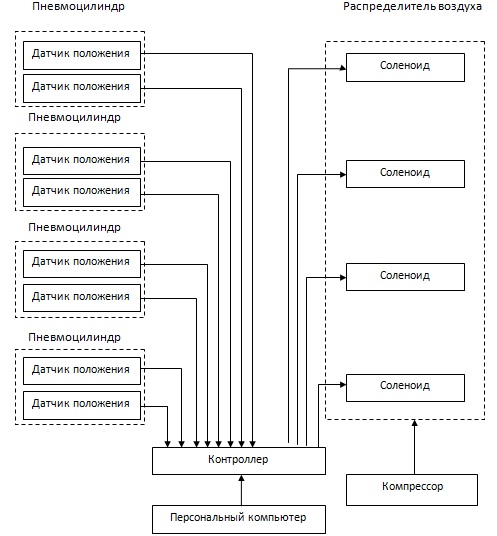
Рис.1.Блок схема
Обоснование блок схемы
Согласно моей блок схемы управление проходит через компьютер. С ПК записывается на контроллер программа, которая в дальнейшем без участия программной среды ПК, регулирует работу пневмосистемы. Датчики положения контролируют положение звеньев пневмоцилиндра, с них поступает сигнал на ПЛК после чего выходит в соленоиды. Далее воздух протекает к определенному пневмоцилиндру, которая дает движение пневмоцилиндрам. Управление движением робота-манипулятора – дискретное, цикловое.
Конструкция устройства
Робот манипулятор устанавливается на платформу из ДВП 500х300х50. Он представлен ниже на рис. 4. Для компактности и удобства сборки, чертежы приведены в сборке со стандартными изделями.
Состав робота-манипулятора:
· Пневматические исполнительные механизмы – пневмоцилиндры двустороннего действия;
· Распределительная аппаратура – пневматические распределители с пружинным возвратом;
· Модуль подготовки воздуха с фильтром-влагоотделителем и редукционный пневматическим клапаном;
· Контрольно-регулирующая аппаратура – пневмодроссели с обратными клапанами, датчики положений, программируемый логический контроллер (ПЛК).
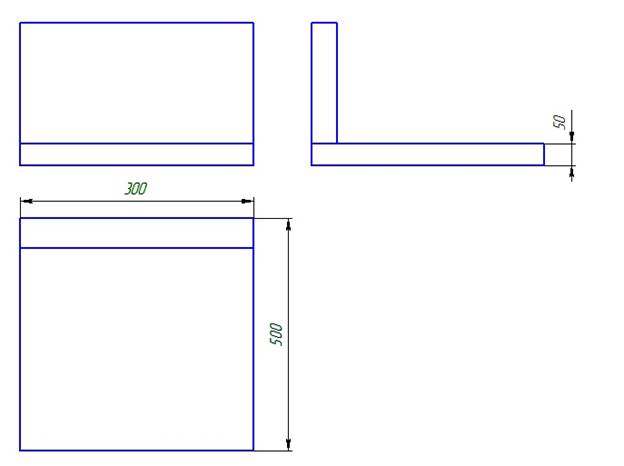
Рис 4. Платформа.
Характеристика и принцип работы
Скорость перемещения пневмоприводов в прямом и обратном направлениях регулируется с помощью дросселей, а рабочее усилие развиваемое и зависящее от давления сжатого воздуха действует – редукционным клапаном. Для обеспечения безопасности робота-манипулятора давление в пневмосистеме ограничивается на уровне 0,2 МПа, также предполагается применение защитного ограждения.
Выбор датчиков
Для решения задачи регулирования положения необходим датчик, который фиксирует положения штоков пневмоцилиндров. Количество точек позицирования для каждого привода – две, это начальная и конечная. За счет этого и прикрепляется два датчика на каждый пневмоцилиндр.
Герконовый датчик серии HX-03R предназначен для позиционирования хода поршня со штоком. Для позиционирования на поршне пневматического цилиндра, должно быть магнитное кольцо. При прохождении, через область срабатывания геркона, поршня с магнитным кольцом, геркон срабатывает. На датчике загорается светодиод, т.е. он срабатывает-замыкая контакт.
Цена датчика HX -03 R 300 руб. Заказать его можно через интернет по ссылке: http://pneumoprivod.ru/price-datchiki.htmили по почте.
Адрес организации: Россия, г. Москва, Варшавское шоссе, д. 32, строение 1, оф. 309
тел.(495) 649-87-26
тел. +7-901-558-93-63
тел. +7 (926) 235-12-86
тел. +7 (926) 235-12-88
Выбор контроллера
Для системы необходимо подобрать программируемый логический контроллер (ПЛК), имеющий минимум 11 дискретных входов и интерфейс для соединения с ПК.
Рассмотрим подобранные варианты ПЛК:
1) ОВЕН ПЛК160-220. Основные технические характеристики.
| Напряжение питания: | От 100 до 240 В 50 Гц (номинальное 220 В) |
| Потребляемая мощность: | не более 6 Вт |
| Параметры встроенного источника питания | Выходное напряжение 24±3 В, ток не более 620 мА |
| Количество дискретных входов | 16 |
| Количество дискретных выходов | 12 |
| Подключаемые входные устройства | датчики, имеющие на выходе транзистор n-p-n или p-n-p типа с открытым коллектором; |
| Габаритные размеры (д×ш×в) | 140 ×110 ×73 |
Табл.4 Основные технические характеристики ОВЕН ПЛК160-220
2) ПЛК Delta DVP - SX . Основные технические характеристики.
| Напряжение питания: | От 100 до 240 В 50 Гц |
| Потребляемая мощность: | не более 5 Вт |
| Количество дискретных входов | 4+8(расширенный модуль) |
| Количество дискретных выходов | 4 |
| Тип входов | DC PNP или NPN |
| Встроенный USB-порт | 1 |
Табл.5 Основные технические характеристики ПЛК Delta DVP - SX .
3) CP1 L - EM 30 DT - D ( OMRON ). Основные технические характеристики.
| Напряжение питания: | От 100 до 240 В 50Гц |
| Потребляемая мощность: | Max 20 Вт |
| Параметры встроенного источника питания | Выходное напряжение 24 В+10% / -15 %, ток не более 400 мА |
| Количество дискретных входов | 18 |
| Количество дискретных выходов | 12 |
| Подключаемые входные устройства | DC PNP или NPN |
| Габаритные размеры (д×ш×в) | 90 ×180 ×85 |
| Объем памяти программы | 2048 слов |
| Рабочие биты | 640 бит |
| Специальные биты | 256 бит |
| Вспомогательные биты | 256 бит |
Табл.6 Основные технические характеристики CP1L-EM30DT-D
+ Возможность подключения адаптера RS-232C
На рынке контроллеров управления компактными машинами серия CP1L демонстрирует компактность микроконтроллера с функциями модульного ПЛК. Устройства обеспечивают выполнение всех необходимых функций для управления машиной, включая превосходную возможность позиционирования. Помимо этого некоторые модели CP1L оснащены встроенным портом Ethernet с возможностью обслуживания разъёма для обеспечения гибкости при подключении для осуществления контроля, эксплуатации, регистрации и удаленного доступа. Если требуется большее количество вводов/выводов, то можно выполнить расширение CP1L при помощи дополнительных плат с последовательной передачей данных или аналоговыми входами/выходами. Так как серия CP1L имеет одинаковое строение с сериями CP1H, CJ1 и CS1, ее программы совместимы для распределения памяти и команд.
ПЛК CP1L-EM30DT-D имеет встроенный источник питания и возможность подключения к ПК через адаптер RS 232C, количество дискретных входов чуть превышает необходимое. Общее количество битов, которые можно использовать как рабочие равно 640+256+256=1152. Что позволяет хранить цифру равную 36864 в десятичном коде. Также в контроллере предусмотрен счетчик, работающий в инкрементальном режиме (0..65535) и в режиме плюс/минус (-32767..32767)
Адаптер CP1L-EM30DT-D подключается к контроллеру через периферийный порт.
Цена контроллера ?483,82. Заказать можно на сайте: http://industrial.omron.ru, или по телефону.
Адрес организации: ул. Правды, д. 26 125040 г. Москва, Россия
Тел.: +7 495 648 94 50
Подбор проводов
Алюминиевые провода, несмотря на невысокую стоимость, значительно проигрывают медным по многим важным показателям: вдвое меньшая электропроводимость относительно медных проводов, быстрое их окисление, ломкость на перегибах. Поэтому лучше остановить свой выбор на медных проводах. Так как система слаботочная, то для двухжильных линий связи подойдут сигнальные кабели с сечением жилы 0.22 мм2, а для одножильных - 0.12 мм2. Рассчитаем запас по току для кабелей с такими сечениями проводника:
0.22 мм2×6 А/мм2=1.32А
0.12 мм2×6 А/мм2=0.72 А
Рассмотрим провода различных производителей.
| Наименование | Производитель | Технические характеристики | Внешний диаметр(мм) | Рабочая температура °С | Цена(руб.) |
| AS-CAB002 | Ramcro (Италия) | Многожильный; 2x0,22мм; луженая медь; (100м); | 3,3±0,3 | -10...+80 | 305 |
| 01-4501 КСПВ | REXANT(China) | Многожильный; 2x0,22мм; луженая медь; (100м); | 3,6 | -40…+60 | 315 |
| LS/E-2/22 | VEC-ING | Многожильный; 2x0,22мм; луженая медь; (100м); | 5±0,1 | -60…+180 | 458.00 |
Табл.7 Характеристики 2-х жильных проводов
Согласно ТЗ, рабочая температура устройства «СВВП» 20±10°С, поэтому выбираем кабель AS-CAB002. К тому же, внешний диаметр этого кабеля меньше остальных.
Рассмотрим более подробные характеристики кабеля AS-CAB002:
· 2-жильный
· Луженый в экране
· Сечение жилы: 0,22мм2
· Диаметр, мм: 3,3±0,3
· Рабочее напряжение, В: 300
· Тестовое напряжение, В: 2000
· Температурный диапазон, °С: –10...+80
· Сопротивление изоляции, мОм х км: более 150
· Сопротивление проводника, Ом/км: менее 100
· Емкость проводник-проводник, пФ/м: 130
· Минимальный радиус скрутки: 12хD
Заказать можно на сайте: http://www.magic-car.ru, или по телефону: +7 (812) 985-1-982
г.Санкт-Петербург, ул., Ушинского д.,12 офис № 81 в автоцентре "Пандора"
Конструкция:
- Токопроводящая жила - из скрученных медных луженых проволок;
- Изоляция - 1-й слой - нити полиэфирные, 2-й слой - поливинилхлоридный пластикат;
- Экран (для МГШВЭ) - оплетка из медных луженых проволок плотностью не менее 70%.
Технические характеристики:
- Электрическое сопротивление изоляции, пересчитанное на 1м длины в нормальных климатических условиях-20000 МОм;
- Устойчивы к вибрации, атмосферным конденсируемым осадкам, статической пыли, солнечному излучению, к кратковременному воздействию высокой температуры до 150°С
- Устойчивы к воздействию бензина, минерального масла и соленой воды, не распростроняют горение;
- Срок эксплуатации - 15 лет.
- Масса 2.3 кг/км
- Электрическое сопротивление жилы 138.6 Ом/км
Сделать заказ можно по телефону: (495) 755-94-55 или на сайте: http://www.bpks.ru. Адрес: г. Москва 2-ая ул. Энтузиастов, д.3
Разъемы
Для подвода питания к контроллеру необходима вилка с заземляющим контактом.


Рис.3.Вилка и розетка
Контактная информация ООО «Элека».
| Москва (Главный офис) | |
| Адрес: | 127576, г. Москва, ул. Илимская, 3Г |
| Телефоны: | +7 950 863 4976 |
| Электронная почта: | sale@eleka.info |
Заказы принимаются по телефону и на сайте.
Список литературы
1. Бесекерский Б.А., Попов Е.П. Теория систем автоматического регулирования. М., "Наука", 1972.
2. Полупроводниковые элементы: Транзисторы. Справочник. Москва.
«Энергоатомиздат.» 1983г. – 904 с.
3. А.Б. Аренков.Печатные и пленочные элементы радиоэлектронной аппаратуры.»Энергия»,Л,1971.302с.
4. Д.В.Васильев.В.Г. Чуич.Системы автоматического управления.»Высшая школа»,1967.418с.
5. Д. П. Ким. Теория автоматического управления. Том 2. Многомерные, нелинейные, оптимальные и адаптивные системы.
6. Источники из интернета.