
Радионавигационных средств обеспечения полетов








Тактические параметры — совокупность показателей назначения, характеризующих возможности РНУ или РНС Основными для большинства РНУ (РНС) тактическими параметрами являются точность, рабочая зона (область) и дальность действия, пропускная способность, быстродействие, надежность, помехоустойчивость, масса и объем бортового оборудования
Точность отражает близость результатов измерений к истинному значению измеряемой величины Характеристикой точности РНС в целом является погрешность определения МЛА Погрешности РНУ (РНС) подчиняются обычно гауссовскому закону распределения с нулевым средним значением При этом распределении основная мера точности — средняя квадратичная погрешность (СКП) σ Вероятность того, что погрешности измерения не превысят σ, равна 0, 683 На практике точность навигационных средств часто регламентируют с доверительной вероятностью 0, 95, соответствующей доверительному интервалу ±2σ При этом 95 % всех измерений имеют погрешность, меньшую 2σ Точностные параметры систем повышенной точности регламентируют при доверительном интервале ±3σ, т. е. для 99, 7 % всех измерений (максимальная погрешность)
Рабочая область — объем пространства, в пределах которого погрешность определения ПМЛА не превышает заданную с определенной вероятностью При решении навигационных задач на плоскости понятию рабочая область соответствует рабочая зона РНС Дальностью действия РНС часто называют максимальное расстояние в пределах рабочей зоны (области)
Пропускная способность определяется как максимальное число ЛА, одновременно обслуживаемых данным РНУ или РНС Ограничение пропускной способности свойственно РНУ и РНС, которые работают по принципу «запрос-ответ»
Быстродействие РНС (РНУ) определяется временем, которое затрачивается на получение навигационной информации Быстродействие увеличивается при одновременности и автоматизации отсчета НП и при использовании ЦВМ для обработки информации
Считается, что на дозвуковых ЛА время на определение МЛА не должно превышать 1 мин при интервалах между измерениями не более 10 мин На сверхзвуковых ЛА это время снижается
до нескольких секунд, а интервалы между измерениями — до 5 мин
Надежность характеризует свойство РНУ и РНС сохранять тактические параметры (в первую очередь точность) в заданных пределах при определенных условиях эксплуатации В качестве основных показателей надежности используют вероятность безотказной работы, интенсивность отказов и среднюю наработку до отказа Первый из этих параметров характеризует вероятность того, что данное устройство в течение заданного времени сохранит свои качественные показатели в пределах допусков Интенсивность отказов — условная плотность вероятности возникновения отказа невосстанавливаемого объекта, определяемая для рассматриваемого момента времени при условии, что до этого момента отказ не возник Средняя наработка до отказа является математическим ожиданием наработки объекта (продолжительности его работы) до первого отказа Одна из мер повышения надежности — использование в РНУ систем встроенного контроля, дающих автоматическую индикацию о неисправности любого из его элементов
По мнению зарубежных специалистов, надежность навигационных средств сверхзвукового самолета должна быть такой, чтобы вероятность отказа не превышала 10—4 за 3 ч (средняя наработка до отказа не менее 3·104 ч) При полетах, например, над Северной Атлантикой надежность навигационного оборудования должна обеспечивать практически полную безаварийность (одно летное происшествие по вине навигационного оборудования на 107 108 летных часов) По установившейся концепции посадочное оборудование должно обеспечивать безопасную автоматическую посадку при вероятности летного происшествия, не превышающей 10—7
Помехоустойчивость РНУ характеризует возможность работы РНУ (РНС) в условиях радиопомех Для количественной оценки помехоустойчивости используют отношение сигнал/помеха (обычно по напряжению), при котором погрешность определения НП не превышает выбранного значения с заданной вероятностью Основные меры повышения помехоустойчивости: подбор несущих частот и формата сигнала, использование временной и частотной селекции сигналов и применение направленных антенн.
Эксплуатационная эффективность характеризуется средними затратами времени на настройку, регулировку и обслуживание устройств и систем по сравнению с временем использования их по назначению. Чем больше затраты времени на профилактические и ремонтные работы, тем ниже эксплуатационная эффективность системы. Повышению эксплуатационной эффективности способствует применение больших интегральных схем высокой надежности. Модульная конструкция аппаратуры облегчает обнаружение и устранение неисправностей и позволяет в случае необходимости изменять или наращивать функции без замены устройства в целом. Существенное значение имеет и возможность выявления отказов устройств с помощью встроенных средств контроля и прогнозирование отказов по данным периодической проверки этих устройств.
Масса и объем бортовой аппарату ры — параметры, определяющие рентабельность ЛА. Увеличение массы и объема аппаратуры приводит к снижению коммерческой загрузки ЛА или сокращению дальности полета. Радикальной мерой улучшения массовых и габаритных характеристик является комплексная микроминиатюризация бортовой аппаратуры на основе применения микроэлектронных компонентов с высокой степенью интеграции.
Технические параметры – совокупность величин, характеризующих технические средства, необходимые для получения заданных тактических параметров.
Важнейшие технические параметры: значение и стабильность несущей частоты; вид и параметры модуляции излучаемых сигналов (формат сигнала); диаграммы направленности антенн; мощность передатчика; чувствительность приемника и т.д.
Задача технической эксплуатации — контроль и стабилизация технических параметров РНУ (РНС). Отклонение любого технического параметра от заданного значения влияет на определенный тактический параметр (или группу параметров), что в отдельных случаях может вызвать отказ РНУ (РНС).
Параметры зарубежных РНС, используемые в технической литературе, кроме перечисленных выше, включают эксплуатационную пригодность, целостность (достоверность) системы и специальные характеристики точности.
Точность систем характеризуют обычно удвоенной СКП, однако эту характеристику используют при определении только линейной точности или при описании погрешностей вдоль ортогональных осей какой-либо системы координат. В системах, определяющих МЛА, применяется удвоенная СКП определения местоположения (2drms), представляющая собой радиус окружности, которая содержит не менее 95 % всех возможных местоопределений данного объекта. Используется также вероятная круговая погрешность (СЕР), т. е. радиус окружности, содержащей 50 % всех местоопределений. Считается, что 2drms = 2,5CEP.
Различают следующие виды точности:
прогнозируемая точность — точность местоопределения по отношению к истинному положению объекта в географических или геодезических координатах;
повторяющаяся точность— точность, с которой потребитель навигационной информации может возвратиться на позицию, координаты которой были измерены ранее с помощью той же РНС;
относительная точность — точность, с которой потребители навигационной информации, использующие одну и ту же РНС, определяют свое положение в одной и той же точке, и которая характеризуется расстоянием между . этими потребителями в момент времени, соответствующий определениям местоположений.
Эксплуатационная пригодность (доступность) — вероятность того, что в любое время и в любой точке пространства РНС обеспечивает потребителя информацией, достаточной для определения местоположения с заданной точностью. Мерой этого параметра является выраженное в процентах отношение времени, в течение которого навигационные сигналы данной РНС пригодны для определения местоположения, к общему времени работы системы. Для большинства систем данная вероятность достигает установившегося значения в начальный период эксплуатации системы и не зависит от времени.
Целостность (или достоверность)— способность системы обнаруживать свое неправильное функционирование и оповещать об этом потребителей, для того чтобы исключить использование системы в тех случаях, когда ее эксплуатационные параметры выходят за пределы установленных допусков. Мера целостности — значение временной задержки, соответствующей интервалу времени от момента начала неправильного функционирования системы до того момента, когда об этом будет сообщено экипажу ЛА.
1. 5. ТОЧНОСТЬ ПОЗИЦИОННЫХ РНС
ПС – передающая станция, СР – среда распространения, ИПС – измеритель параметра сигнала, ВНП – вычислитель навигационного параметра, ВЛП – вычислитель линии положения, ВМП – вычислитель местоположения.
Точность определения МЛА — статическая мера характеристик системы. Заключение о точности РНСдолжно содержать данные об имеющейся при этом неопределенности определения МЛА.
Погрешности навигационных систем имеют обычно известный закон распределения, и неопределенность МЛА может быть выражена вероятностью того, что погрешность не превысит заданное значение. Определение точности осложняется тем, что она зависит от нестабильности передаваемого сигнала, влияния погоды и других физических изменений в среде распространения, погрешностей приемной аппаратуры и вычисления МЛА. Хорошая точность каждого из входящих в систему РНУ еще не гарантирует высокой точности определения МЛА, так как последняя является функцией «геометрии системы», т. е. взаимного расположения ЛА относительно РНТ системы. В общем случае точность РНС может быть найдена только из анализа точностного поля системы (рис. 1. 9), которое представляет собой распределение погрешностей по тракту определения МЛА.
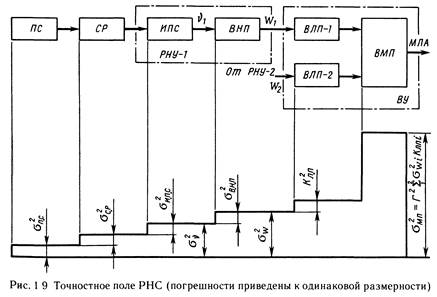
Основные источники составляющих погрешности σΜΠ определения МЛА: σПС — внутренние дестабилизирующие факторы, действующие на передающую станцию ПС, излучающую навигационный сигнал, σср — внешние факторы, искажающие информативный параметр сигнала в среде распространения СР или при отражении сигнала, σипс – недостаточная точность и шумы измерителя параметра сигнала ИПС, σΒΗΠ – нестабильность масштабного коэффициента Μ и погрешности пересчета ν в значения W вычислителем навигационного параметра ВНП, КЛП – геометрические особенности линий положения, учитываемые вычислителем линии положения ВЛП, Г – геометрический фактор, сказывающийся при обработке данных двух РНУ вычислителем местоположения ВМП Второстепенные погрешности (например, вычислительного устройства ВУ) на рис 1 9 не показаны Обычно источники погрешностей действуют независимо и общая погрешность определяется геометрической суммой отдельных составляющих
Погрешность определения ΗΠ находится из основного уравнения РНУ, которое для большинства устройств имеет вид W = Mv , где Μ – масштабный коэффициент Погрешность
σW= ( Μ 2σ2 + ν 2σ2M)1/2
зависит от точности измерения информативного параметра сигнала (σν) и масштабного коэффициента M, а также от его нестабильности σΜ.
Погрешность измерения ν — одна из основных причин снижения точности определения НП При отсутствии погрешностей σпс и σcp нижняя граница σν определяется потенциальной точностью РНУ, которая соответствует оптимальной обработке сигналу использованием согласованного с сигналом фильтра или коррелятора При оптимальной обработке сигнала, наблюдаемого на фоне аддитивного гауссовского шума n(t) с постоянной спектральной плотностью nО («белый шум»), отношение q 2 энергии сигнала Э к спектральной плотности шума имеет наименьшее из возможных значение q2min = q2O= 2Э/No, где энергия определяется амплитудой сигнала Um и временем его наблюдения Tн, т е
Потенциальная точность характеризуется минимальной дисперсией σ2νπ измерения ν, составляющей

 (амплитудные РНУ),
(амплитудные РНУ),
 (частотные РНУ (q 02 >>1))
(частотные РНУ (q 02 >>1))
(временные РНУ (q02 >>1))

(фазовые РНУ),
где Тэ и ΔFЭ — эффективные длительность и ширина спектра сигнала. Последние два параметра определяются из соотношений
где S ( f ) — амплитудный спектр сигнала U ( t )
Масштабный коэффициент Μ зависит от типа РНУ и вида информативного параметра сигнала. При М= const погрешность σW=Mς. Для достижения требуемой точности определения НП при заданном (достижимом на данном уровне техники) значении σν необходимо уменьшать Μ путем соответствующего выбора технических параметров РНУ Дополнительной мерой повышения точности является стабилизация масштабного коэффициента, широко применяемая в РНУ Эта мера приводит к устранению или уменьшению составляющей νσΜ общей погрешности определения НП
Точность определения МЛА при заданном значении σ W зависит от геометрических особенностей РНУ и РНС, т е от вида НП и положения ЛА относительно РНТ системы. Эти факторы приводят к погрешности определения линии положения и снижению точности определения МЛА
Погрешность определения линии по ложения АЛП, т е кратчайшее расстояние между измеренной и истинной линиями положения, зависит от формы линий положения и взаимного расположения ЛА и РНУ. Эту погрешность
характеризуют CKП 
где Тэ — коэффициент погрешности линии положения При определении МЛА на плоскости ΧΥ
 ,
,
где параметр W должен быть выражен в координатах x, у
Погрешность определения M Л A на плоскости АМЛА есть кратчайшее расстояние между МЛАИ и МЛАо, т е между определенным по результатам измерений и истинным МЛА (рис 1 10) Эту погрешность характеризуют СКП

где γ — угол пересечения линий положения, ρ — коэффициент корреляции, учитывающий взаимную связь погрешностей определения W 1 и W 2 Обычно принимают р = 0. Тогда

Величина σΜΠ представляет собой радиус среднего квадратичного круга рассеивания Вероятность того, что результат измерения будет находиться внутри данного круга, составляет 0,63 0,68. Разброс вероятностей является следствием отличия закона распределения погрешностей Δ МЛА от гауссовского При выборе в качестве меры точности величины 2σΜΠ вероятность попадания результатов измерений в круг радиусов 2σΜΠ лежит в пределах 0, 95 0, 98, т е 2σМП =2 drms
Погрешность определения местопо ложения ЛА в пространстве при не зависимости измерений по разным координатам

где γ1 — угол между третьей поверхностью положения и линией положения на плоскости, σпп3 — СКП определения третьей поверхности положения.