
Общие сведения о радионавигационных устройствах и системах








ОБЩИЕ СВЕДЕНИЯ О РАДИОНАВИГАЦИОННЫХ УСТРОЙСТВАХ И СИСТЕМАХ
1.1. ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
Вероятность доверительная — вероятность, того, что погрешность измерения не выйдет за пределы заданного доверительного интервала.
Линия положения — множество точек в зоне действия РНС, характеризующееся одним и тем же значением НП.
Место Л А — точка, соответствующая проекции центра масс ЛА на земную поверхность.
Место Л А пространственное — точка пространства, в которой в данный момент находится центр масс ЛА.
Навигация — наука о методах и средствах, обеспечивающих вождение подвижных объектов из одной точки пространства в другую по траекториям, которые обусловлены характером задачи и условиями ее выполнения.
Ортодромия — дуга большого круга, плоскость которого проходит через центр земного шара и две заданные точки на его поверхности.
Параметр навигационный ( W ) — измеряемая данным РНУ геометрическая величина или ее производная, которая либо совпадает с навигационным элементом, либо связана с этим элементом известным соотношением.
Параметр сигнала информативный (ν)—параметр сигнала, функционально связанный с определяемым НП.
Поверхность положения — геометрическое место точек в пространстве, соответствующих одному значению НП.
Погрешность измерения — отклонение результата измерения от истинного значения измеряемой величины.
Режим полета навигационный — закон изменения навигационных элементов на данном участке (этапе) полета.
Система радионавигационная — совокупность РНУ, предназначенных для решения навигационной задачи (определение МЛА, посадка и т. п.).
Скорость путевая ( Vr ) — проекция вектора скорости на горизонтальную плоскость.
Средства обеспечения полета радио навигационные — совокупность наземных и бортовых устройств, обеспечивающих решение основной задачи навигации и основанных на радиотехнических принципах.
Точка радионавигационная — пункт с известными координатами, в котором размещена аппаратура РНС, излучающая или принимающая сигналы. Относительно этого пункта определяется местоположение ЛА.
Точность — качество измерений, отражающее близость их результатов к истинному значению измеряемой величины и характеризуемое статистическими параметрами погрешностей измерения.
Точность потенциальная — наивысшая точность измерения информативного параметра сигнала, достигаемая при оптимальной обработке сигнала.
Устройство радионавигационное — наземная и бортовая (или только бортовая) аппаратура, предназначенная для определения одного навигационного параметра.
Угол сноса (β C)—угол в горизонтальной плоскости между векторами воздушной и путевой скоростей.
Элементы полета навигационные — геометрические и механические скалярные величины, характеризующие ПМ-ЛА и вектор скорости в данный момент.
1.2. РАДИОНАВИГАЦИОННОЕ ОБЕСПЕЧЕНИЕ ПОЛЕТОВ
Позиционный метод основан на нахождении линий или поверхностей положения (рис. 1.4), соответствующих НП, которые характеризуют положение ЛА относительно РНТ. Для определения ПМЛА необходимо знание трех поверхностей положения ПП. Положение ЛА на некоторой поверхности, соответствующей, например, высоте полета Η = const, находится по пересечению двух линий положения ЛП.
Большинство РНС реализует позиционный метод, что объясняется возможностью определения МЛА без учета и знания пройденного пути. Основная особенность позиционных систем — определение МЛА только в зоне действия РНС. На точность позиционных РНС большое влияние оказывают внешние дестабилизирующие факторы (помехи, отраженные сигналы и т. п.).
Погрешности определения МЛА (2σΜΠ, км) при использовании позиционного метода и метода счисления пути имеют следующие ориентировочные значения:
Радиосистемы ближней навигации (при удалении ЛА до 400 км от РНТ):
РСБН........... 0,5; VOR/DME 1,8
Системы счисления пути:
доплеровская навигационная система . . . 0,015S
инерциальная навигационная система .... 0,004S
Здесь S — пройденный путь. Принято, что ЛА движется со скоростью 1000 км/ч. Погрешность курсовой системы σКC = 0,5°.
Системы координат, в которых определяют ПМЛА, выбирают в зависимости от маршрута полета, имеющихся радионавигационных (и других) средств обеспечения полета и полетной задачи.
Глобальные системы координат позволяют определять положение ЛА тремя координатами, жестко связанными с Землей: высотой полета Я, широтой φ и долготой λ. Радиотехническими средствами определяется истинная высота полета, т. е. расстояние от ЛА до земной поверхности. Широту и долготу РНУ непосредственно не измеряют. Эти координаты определяются вычислителями, входящими в состав бортовой аппаратуры некоторых РНС.
|
|
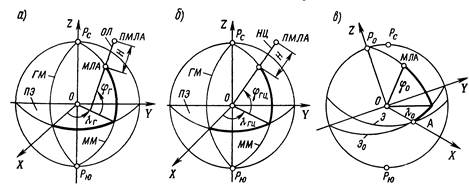
Рис. 6. Глобальные системы координат.
Наибольшее распространение получили географическая, геоцентрическая и ортодромическая глобальные системы координат.
В географической системе координат (рис. 1.6, а) МЛА определяется наземном геоиде. Географическая широта ψг — угол между плоскостью экватора ПЭ и отвесной линией ОЛ, а географическая долгота λΓ — угол между плоскостями Гринвичского меридиана ГМ и меридиана ММ, проходящего через МЛА.
В геоцентрической и ортодромической системах координат Земля принимается за шар, что упрощает навигационные расчеты. Данные системы — основные в авиационной навигации. Геоцентрическая широта СРгц (рис. 1.6, б) — угол между плоскостью экватора ПЭ и направлением НЦ из данной точки к центру Земли. Геоцентрическая долгота λΓΙΙ определяется так же, как и географическая.
Ортодромическая система (рис. 1.6, в) отличается тем, что ее экватор Э0 (главная ортодромия) и полюс Р0 повернуты относительно земного экватора Э и географического полюса pc на определенный угол. За экватор Э0 удобно принять ортодромию, совпадающую с трассой полета. Ортодромическая долгота λ0 отсчитывается вдоль главной ортодромии от выбранной начальной точки А. Ортодромическая широта φ0 есть кратчайшее расстояние между МЛА и главной ортодромией. Координаты λ0 и φ0 обычно задаются в линейных величинах. Положение ортодромической системы относительно земного шара определяется, например, географическими координатами точки А и точки вертекса (точки главной ортодромии с наибольшей широтой) или Р0.
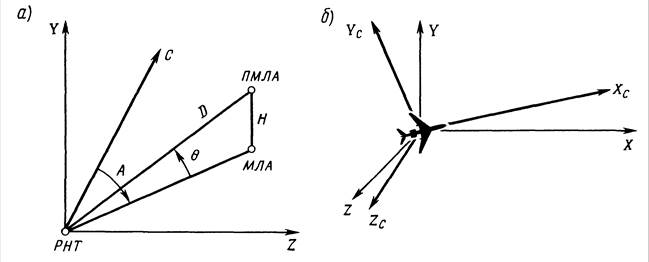
Рис. 1.7. Местные системы координат
Местные системы координат применяют при определении навигационных элементов с помощью РНУ малой и средней дальности. В горизонтальной сферической системе (рис. 1.7, а) начало координат может совмещаться с РНТ. Поверхность Земли считается горизонтальной (что возможно при удалениях Л А от РНТ до 1000 км) и принимается за основную плоскость отсчета. Одну из осей системы совмещают с северным направлением С меридиана, проходящего через РНТ. Положение ЛА определяется дальностью D, азимутом Л и углом возвышения θ (или высотой H).
При измерениях скорости и угловых координат бортовыми РНУ используется связанная с ЛА система координат (рис. 1.7, б). Начало системы находится в центре масс ЛА. Ось Хс совмещается с продольной осью ЛА, а ось Zc — с поперечной осью. Углы и положение вектора скорости в этой системе отсчитываются обычно от оси Хс.
Используется также не связанная с ЛА горизонтальная прямоугольная система координат, начало которой совпадает с центром масс ЛА, а оси X и Ζ лежат в плоскости горизонта. Система является опорной при определении угловых положений ЛА, т. е. углов крена, тангажа и курса.
3. ОСОБЕННОСТИ РАДИОНАВИГАЦИОННЫХ СРЕДСТВ ОБЕСПЕЧЕНИЯ ПОЛЕТОВ
Вид информативного параметра сиг нала ν определяет потенциальную, т е предельно достижимую, точность РНУ Источником информации о НП служит принимаемый сигнал u ( t ) = Umsin(ωt + ψ), где Um — амплиту да, ω — частота, t — время, ψ — фазовый сдвиг. В зависимости от того, какой из параметров полезного сигнала информативный, различают амплитудные, частотные, временные и фазовые РНУ Заключенная в ν информация выделяется при сравнении принятого сигнала с опорным Отдельную группу РНУ составляют корреляционные устройства с псевдошумовыми сигналами.
Амплитудные РНУ определяют НП по результатам измерения амплитуды сигнала Амплитуда принимаемого сигнала зависит не только от НП, но и от многочисленных факторов, учесть которые не всегда возможно Область применения амплитудных РНУ ограничивается определением угловых координат. В таких РНУ для уменьшения паразитных (не вызываемых изменением НП) вариаций амплитуды сигнала применяется измерение глубины амплитудной модуляции m или разности глубин модуляции РГМ, представляющих собой информативные параметры сигнала.
Обязательный элемент амплитудных угломерных РНУ — одна или несколько направленных антенн, с помощью которых формируется сигнал с амплитудой Um (ψ p ), зависящей от угла рассогласования ψр между осью симметрии ОС диаграммы направленности ДНИ и направлением передатчик — приемник НПП (рис 1.8).
Сигнал, амплитуда Umo которого не зависит от угла рассогласования при определенном значении последнего, формируется либо дополнительной антенной (ДНД), либо при обработке сигналов, принятых от направленных антенн (суммарный сигнал). Информативный параметр сигнала v = m = Um (ψp )/( Umo )
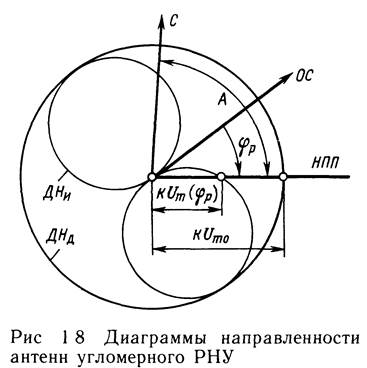
Погрешность определения угловых координат σ w = K п σ v / f и ’(0), где σν — погрешность измерения ν, которая тем меньше, чем больше отношение сигнал/шум на входе измерителя, f и(0) — крутизна ДНИ при φρ = 0, Кп — постоянный коэффициент, зависящий от пост роения РНУ.
Частотные РНУ определяют НП по результатам измерений частоты сигнала, т е ν = ω. Они применяются в основном для определения высоты полета (радиовысотомеры малых высот) и скорости ЛА (доплеровские измерители скорости), основаны на сравнении частоты отраженного от земной поверхности сигнала с частотой опорного сигнала и работают в режиме непрерывного излучения. Опорным сигналом служат излучаемые колебания. Требуемая точность достигается только при когерентности отраженного и опорного сигналов, т е при достаточно высокой стабильности опорного генератора (генератора высокой частоты), когда уход его частоты за время прохождения сигнала от ЛА до земной поверхности и обратно существенно меньше измеряемого сдвига частоты Разница по частоте принимаемого и опорного сигналов в радиовысотомерах является следствием частотной модуляции излучаемых колебаний, а в измерителях скорости вызывается доплеровским сдвигом частоты.
Непрерывный характер излучения колебаний приводит к появлению просачивающегося или прямого сигнала, по падающего в приемный тракт из-за паразитных электромагнитных связей с передающим Прямой сигнал имеет случайную модуляцию и при детектировании дает шумовое напряжение, ухудшающее чувствительность приемника и ограничивающее максимальные рабочие высоты частотных РНУ
Принимаемый сигнал образуется в результате отражения от участка земной поверхности в пределах ДН антенны РНУ Отдельным точкам этого участка соответствуют разные задержки сигнала и различные доплеровские сдвиги частоты В результате отраженный сигнал приобретает случайный характер и имеет сплошной спектр Измерители частоты, входящие в частотные РНУ, определяют среднюю или среднюю квадратичную частоту спектра случайного сигнала Поэтому любое искажение огибающей спектра, например, из-за неравномерности коэффициента отражения или наложения шумов приводит к погрешности частотного РНУ
Временные РНУ определяют ΗΠ по результатам измерения времени запаздывания сигнала (ν = t) Сигналы временных РНУ имеют импульсный характер (импульсные устройства)
Временные (импульсные) РНУ применяются для определения дальности, разности дальностей и угловых координат и основаны на измерении интервала времени между импульсными сигналами В разностно-дальномерных и угломерных РНУ импульсы, интервал времени между которыми измеряется на ЛА, формируются аппаратурой опорных станций (обычно наземных) В дальномерных РНУ измеряется время между излучением с ЛА запросного сигнала и приемом ответного сигнала от наземного радиомаяка
Импульсные сигналы временных РНУ имеют форму, близкую к колоколообразной, и отсчет времени производится по некоторой характерной точке огибающей импульса, где крутизна нарастания (или спада) импульса максимальна При таком выборе точки отсчета уменьшаются погрешности измерения, которые вызываются помехами и шумами, искажающими форму огибающей импульса
Фазовые РНУ определяют НП по результатам измерения фазового сдвига сигнала (ν = ψ), применяются для определения дальности, разности дальностей и угловых координат и основаны на измерении разности фаз двух сигналов Отличительная особенность фазовых дальномерных РНУ — наличие бортовых эталонных генераторов с высокой долговременной стабильностью часто ты С фазой колебаний этого генератора производится сравнение фазы принимаемого сигнала В фазовых угломерных РНУ определяется разность фаз между сигналом, несущим навигационную информацию, и опорным сигналом Опорный сигнал формируется аппаратурой наземного радиомаяка и передается на борт ЛА
Погрешность σw определения НП связана с погрешностью измерения фазы σψ соотношением σw=λσψ/2π и уменьшается с уменьшением длины волны λ, на которой производится измерение фазы. Однако при уменьшении λ сокращается зона однозначного определения НП, поскольку точно судить о НП можно лишь в том случае, если вызываемый изменением W фазовый сдвиг не превысит 2π Противоречие между требуемой точностью и однозначностью определения НП характерно для фазовых РНУ
Фазовые РНУ относятся к узкополосным устройствам и чувствительны к паразитным фазовым сдвигам, возникающим в резонансных элементах трактов обработки при нестабильности частоты их настройки или несущей частоты сигнала Эти фазовые сдвиги тем меньше, чем шире полоса пропускания тракта Паразитные фазовые сдвиги имеют место и при распространении сигналов и могут привести к существенным погрешностям определе ния навигационных параметров, особенно в системах дальней навигации
Корреляционные РНУ определяют НП при вычислении максимума взаимной корреляционной функции (ВКФ) принятого и опорного сигналов Основной областью применения корреляционных РНУ, кроме обзорно-сравнительных систем, является измерение дальности при псевдошумовых сигналах При этом в бортовой аппаратуре должна генерироваться копия сигнала, прием которого ожидается Необходима точная синхронизация моментов излучения сигнала и генерации опорного сигнала, так как по сдвигу последнего во времени, необходимому для получения максимума ВКФ, оценивается дальность. Отличительная особенность такого РНУ — высокая точность, малые энергетические затраты на излучение сигнала и высокая помехоустойчивость. Эти качества проявляются тем сильнее, чем шире спектр сигнала. Кроме того, при соответствующем формате сигнала высокая точность сочетается с однозначностью измерения дальности.
Вид навигационного параметра W влияет на форму поверхностей и линий положения, т. е. на геометрические особенности РНУ, от которых зависит точность определения МЛА. Различают угломерные, дальномерные, разностно-дальномерные РНУ и измерителя скорости.
Угломерные РНУ определяют ΗΠ — угол в горизонтальной или вертикальной плоскости или в главной плоскости системы координат, связанной с ЛА. Применяются радиомаячные и радиопеленгационные РНУ. Радиомаячные устройства (обычно наземные) формируют электромагнитное поле, параметры которого зависят от угловых координат точки приема. Представителями этой группы являются угломерные РНУ систем посадки и угломерные каналы систем ближней навигации. Радиопеленгационные устройства (радиопеленгаторы) определяют угловые координаты источника сигнала путем измерения направления прихода радиоволн. Применяются как наземные радиопеленгаторы, так и бортовые (радиокомпасы).
Поверхность положения угломерных РНУ — вертикальная плоскость (при определении угла в горизонтальной плоскости, например азимута) или конус (при определении угла в вертикальной плоскости). Линия положения, образованная сечением поверхности положения плоскостью (горизонтальной или вертикальной), в которой определяется угловое положение ЛА, есть прямая (линия равных азимутов или углов места).
Дальномерные РНУ (радиодальномеры) определяют НП — дальность D ( W = D ) либо удвоенную дальность ( W = 2 D ) до РНТ. Радиодальномеры без ответчика ( W = D ) основаны на сравнении параметров сигнала, принятого от аппаратуры, установленной в РНТ, с сигналом бортового эталона и составляют основу спутниковых навигационных систем и систем дальней навигации. Дальномеры с ответчиком определяют W =2 D сравнением сигнала, принятого от ответчика (дальномерного радиомаяка), с запросным сигналом. На принципе «запрос-ответ» построены радиодальномеры систем ближней навигации. К дальномерным устройствам относится и радиовысотомер (W = 2 H, где Η — высота полета). Поверхность положения дальномерных РНУ — сфера радиуса D, а линия положения — окружность (линия равных дальностей).
Разностно-дальномерные РНУ определяют W = D 1 — D 2 , где D 1 и D 2 — расстояние ЛА от двух РНТ, в которых расположены передающие радиостанции (PC). Разность расстояний Dp = D 1 — D 2 находится сравнением параметров сигналов, принимаемых от передающих радиостанций. Наибольшее применение разностно-дальномерные РНУ получили в системах дальней навигации.
Поверхность положения разностно-дальномерных РНУ — гиперболоид, образованный вращением гиперболы Dp = const (вокруг оси, проходящей через РНТ (фокусы гиперболы)), а сама гипербола является линией положения РНУ.
Измерители скорости предназначены для определения вектора горизонтальной скорости Vг или вектора полной скорости V. Информация о W (компоненты V) заключена в доплеровском сдвиге частоты F Д ( v = F Д ), который выделяется при сравнении частоты отраженного от земной поверхности сигнала с частотой излучаемых колебаний. К рассматриваемым РНУ относятся доплеровские измерители скорости и угла сноса (ДИСС), которые обычно используют в качестве датчиков систем счисления пути.
Степень автономности определяет возможность использования РНУ или РНС для навигации ЛА на трассах, не обслуживаемых наземными или спутниковыми средствами обеспечения полетов. Различают автономные и неавтономные РНУ (РНС). Неавтономные РНС делятся на однопозиционные и многопозиционные.
Автономные РНУ определяют навигационные параметры с помощью только бортовой аппаратуры данного ЛА. В таких РНУ реализуются радиолокационные принципы, т е НП определяются по отраженному сигналу (радиовысотомеры, ДИСС, метеонавигационные радиолокаторы)
Неавтономные РНУ включают как бортовую аппаратуру данного ЛА, так и связанную с ней радиолинией аппаратуру, размещенную в РНТ или на других ЛА К неавтономным относятся системы спутниковой, дальней и ближней навигации, посадки.
Многопозиционные РНС — совокупность разнесенных в пространстве и функционально связанных между собой пунктов излучения — РНТ, совместная обработка сигналов которых позволяет с высокой точностью определить как МЛА, так и параметры движения ЛА Повышению точности способствует избыточность информации из-за большого числа пунктов излучения сигналов, которая позволяет выбрать такие источники сигналов, геометрическое расположение которых относительно ЛА наиболее благоприятно в смысле снижения погрешности Типичный пример — спутниковые навигационные системы и системы дальней навигации
Назначение характеризует вид навигационных задач, для решения которых служит РНУ или РНС Различают системы дальней и ближней навигации и посадки, а также спутниковые навигационные системы
Системы дальней навигации (СДН) относятся к многопозиционным дальномерным или разностно-дальномерным системам, работают в диапазонах километровых и мириаметровых волн и имеют дальность действия до нескольких тысяч километров. Дальномерные СДН — фазовые и требуют для определения МЛА две наземные станции (РНТ). В разностно-дальномерных СДН измеряется разность фаз когерентных сигналов, принятых от трех-четырех взаимно синхронизированных наземных станций (РНТ).
Спутниковые навигационные систе мы (СНС) — многопозиционные, работают в диапазоне дециметровых волн и определяют ПМЛА по измерениям дальности относительно РНТ, за которые принимаются точки расположения навигационных искусственных спутников Земли в момент измерения. При соответствующем расположении спутников измерения возможны практически в любой точке земной поверхности (глобальные РНС) Большая точность СНС достигается применением псевдошумо вых сигналов
Системы ближней навигации (СБН) — однопозиционные и обслужи вают зону, в пределах которой возможен прием сигналов наземных радиомаяков (РМ), работающих в диапазоне ультракоротких волн При высотах полета до 10 км диаметр этой зоны (дальность прямой видимости) не превышает 420 км В основу СБН положено опреде ление азимута и дальности до наземного радиомаяка (РНТ) Угломернодально мерные СБН по виду информативного параметра сигнала относятся к временным (импульсным) и фазовым РНС Системы посадки метрового диапазо на выдают экипажу и САУ информацию о значении и знаке отклонения ЛА от линий курса и глиссады, создаваемых в пространстве наземными курсовыми (КРМ) и глиссадным (ГРМ) радиомаяками, а также о пролете маркерных (МРМ) радиомаяков, установленных на известном расстоянии от начала ВПП Принципиальный недос таток таких систем — формирование в пространстве единственной траектории, лежащей в плоскости оси ВПП под углом возвышения 2 4°, что неприемлемо для ЛА с укороченным или вертикальным взлетом и посадкой Кроме того, на параметры системы посадки оказывают существенное влияние местные объекты и рельеф местности Перспективные системы посадки сантиметрового диапазона в значительной мере свободны от этих недостатков
1. 4. ПАРАМЕТРЫ