
Лекція 2. Різновиди вимірювальних механізмів елекричних вимірювальних засобів








План
1.
2.
1.
2.
2.1. Загальні відомості
2.2. Загальні відомості до вимірювальних приладів прямого перетворення
2.3. Основні види вимірювальних механізмів
1.
2.
2.1. Загальні відомості
Вимірювальний механізм (ВМ) – це пристрій, призначений для перетворення вхідної електричної величини в переміщення рухомої частини (кутове, лінійне).
Залежно від виду енергії, яка використовується для утворення рушійних зусиль (сил), а також конструктивних особливостей ВМ останні поділяються на магніто-електричні, електромагнітні, електро- та феродинамічні, індукційні, електростатичні, теплові та біметалеві. Різноманітні типи і конструкції вимірювальних механізмів складаються з багатьох подібних деталей, які залежно від принципу дії ВМ, їх призначення і умов експлуатації мають лише конструктивні відмінності. Усі ці деталі утворюють рухому та нерухому частини ВМ.
Електромагнітна енергія вхідної величини витрачається у ВМ на переміщення (переважно кутове) рухомої частини. Робота  , виконана при повороті рухомої частини на кут , визначається співвідношенням:
, виконана при повороті рухомої частини на кут , визначається співвідношенням:
 , (2.1)
, (2.1)
де Мо – обертаючий момент;
 – зміна електромагнітної енергії ВМ.
– зміна електромагнітної енергії ВМ.
Вираз для енергії електромагнітного поля матиме вигляд:
 , (2.2)
, (2.2)
в свою чергу:
 ; (2.3)
; (2.3)
 , (2.4)
, (2.4)
де Wел – енергія електричного поля; Wмагн – енергія магнітного поля; Сk,p, Uk,p – ємність і напруга між k-м та р-м тілами; Ik, Ір – струми в k-му та р-му контурах; Lk – індуктивність k-го контуру; Mk,p – взаємоіндуктивність між k-м та р-м контурами.
Практично в кожному ВМ використовується лише певний вид енергії.
Зокрема, в електростатичних ВМ обертаючий момент утворюється енергією електричного поля, в електро-магнітних – енергією, нагромадженою в магнітному полі котушки індуктивності Lk, в електродинамічних (феродинамічні, індукційні та магнітоелектричні ВМ можна розглядати як різновиди електродинамічних) – енергією індуктивно-зв'язаних кіл.
Отже, обертаючий момент визначається як похідна енергії електромагнітного поля за геометричною координатою:
 . (2.5)
. (2.5)
Узагальнений вираз для обертаючого моменту має вигляд:
 (2.6)
(2.6)
або
 , (2.7)
, (2.7)
де k – коефіцієнт пропорційності; Y, Y1, Y2 – вхідні електричні величини ВМ;
 – функція кута повороту рухомої частини.
– функція кута повороту рухомої частини.
Для однозначної взаємовідповідності між вхідною та вихідною величинами у ВМ необхідно зрівноважити обертаючий момент протидіючим Мп, тобто виконати умову статичної рівноваги. Протидіючий момент, спрямований назустріч обертаючому, зростає із збільшенням кута повороту рухомої частини. В загальному випадку:
 . (2.8)
. (2.8)
Такий протидіючий момент у механізмах з керованими опорами (коли вісь 1 рухомої частини закінчується кернами (рис. 10.1,а), які опираються на підп'ятники 3, утворюється з допомогою спіральних пружин 2; у приладах з рухомою частиною на розтяжках чи підвісі 5 (рис.10.1,б,в) – закрученням відповідно розтяжок чи підвісу. В усіх цих випадках протидіючий момент:
 , (2.9)
, (2.9)
де W – питомий протидіючий момент;  – кут закручення пружини (повороту рухомої частини).
– кут закручення пружини (повороту рухомої частини).
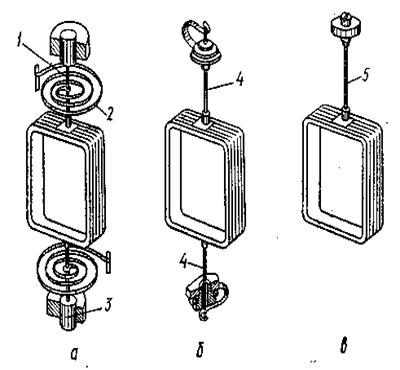
Рис. 2.1. Різновиди опор
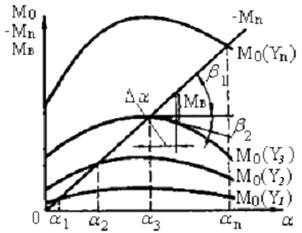
Рис. 2.2. Графіки обертаючого і протидіючого моментів
Статична рівновага рухомої частини ВМ, якщо нехтувати тертям в опорах, матиме місце при рівності обертаючого та протидіючого моментів (рис. 2.2):
 . (2.10)
. (2.10)
Отже, рівняння перетворення (зв'язок між кутом повороту  і значенням вимірюваної величини) матиме вигляд:
і значенням вимірюваної величини) матиме вигляд:
 (2.11)
(2.11)
або
 . ( 2.12)
. ( 2.12)
На рухому частину, виведену з положення статичної рівноваги на деякий кут  (рис.2.2), буде діяти встановлюючий момент
(рис.2.2), буде діяти встановлюючий момент  , значення якого визначається різницею між обертаючим та протидіючим моментами.
, значення якого визначається різницею між обертаючим та протидіючим моментами.
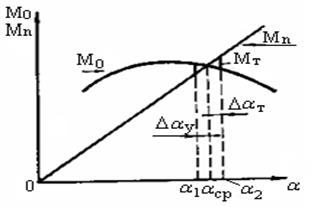
Рис. 2.3. Графік моментів і похибка від тертя
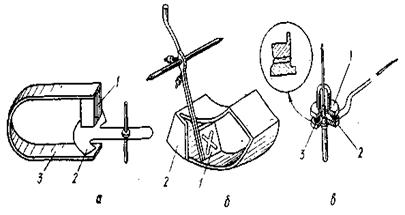
Рис. 2.4. Види заспокоювачів
Питомий встановлюючий момент Мв – це похідна від встановлюючого моменту за кутом повороту:
 . (2.13)
. (2.13)
У загальному випадку обертаючий, а отже, і питомий встанов-люючий моменти є деякою функцією кута повороту рухомої частини.
Рівність Мо=Мп має місце лише у випадках, коли відсутнє тертя в опорах, наприклад, коли рухома частина закріплена на розтяжках або підвісі. В приладах з опорами на кернах в результаті тертя між керном і підп'ятником виникає момент тертя Мт, напрямлений проти напрямку руху. Внаслідок дії цього моменту виникає деяка невизначеність (варіація) відхилень рухомої частини (рис. 2.3), бо при зростанні вхідної величини до значення  сp рівновага настане при відхиленні:
сp рівновага настане при відхиленні:
 , (2.14)
, (2.14)
а при спаданні вхідної величини до значення ср:
 , (2.15)
, (2.15)
де  – відхилення рухомої частини при відсутності тертя;
– відхилення рухомої частини при відсутності тертя;  – похибка, зумовлена тертям у опорах.
– похибка, зумовлена тертям у опорах.
Для зменшення тривалості або одержання бажаного характеру перехідного процесу, який є при встановленні статичної рівноваги, вводяться заспокоювачі (рис. 2.4). Найчастіше застосовуються маг-нітоіндукційні або повітряні заспокоювачі, в окремих випадках – рідинні.
Магнітоіндукційний заспокоювач (рис. 2.4,а) складається з постійного магніту 1, рухомого сектора 2 із неферомагнітного провідникового матеріалу та магнітопроводу 3. Електрорушійна сила, що наводиться в рухомому секторі при його переміщенні в колі постійного магніту:
 , (2.16)
, (2.16)
де Ф – магнітний потік;
 – швидкість кутового переміщення сектора.
– швидкість кутового переміщення сектора.
Струм іс, який при цьому виникає в секторі, взаємодіє з потоком Ф, в результаті чого виникає момент заспокоєння:
 (2.17)
(2.17)
де  – коефіцієнт заспокоєння; rс – опір диска струмові іс; k – коефіцієнт пропорційності.
– коефіцієнт заспокоєння; rс – опір диска струмові іс; k – коефіцієнт пропорційності.
Елементами повітряного заспокоювача (рис. 2.4,б) є легке рухоме крило 7, закріплене на осі рухомої частини, і камера заспокоювача 2.
Рідинні заспокоювачі бувають двох видів. У тих випадках коли треба забезпечити значне заспокоєння або коли введення додаткової деталі у формі крила повітряного заспокоювача приводить до недопустимого збільшення моменту інерції рухомої частини, всю рухому частину ВМ поміщають у футляр з рідиною (олією, спиртом). З появою невисихаючих кремнійорганічних рідин (час 50%-ного висихання – до 50 років) почали застосовувати крапельні рідинні заспокоювачі (рис.2.4,в). У вузькій щілині між нерухомим 1 і рухомим 2 кільцями крапля 3 кремнійорганічної рідини надійно утримується силами поверхневого натягу. Залежно від в'язкості рідини можна досягти різного ступеня заспокоєння.
У повітряних та рідинних заспокоювачах момент заспокоєння виникає внаслідок втрат на в'язке тертя. Вираз для їх моменту заспо-коєння в першому наближенні такий самий, які для магнітоіндукційних (інша лише формула для коефіцієнта заспокоєння).
2.2. Основні види вимірювальних механізмів
Магнітоелектричні ВМ. Існують два основні різновиди магнітоелектричних вимірювальних механізмів: з рухомою котушкою (рамкою) і нерухомим магнітом (зовнішнім або внутрішнім) та з рухомим магнітом і нерухомою котушкою.
Будову магнітоелектричного механізму з
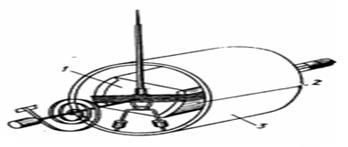
Рис. 2.5. Магнітоелектричний ВМ з внутрішньорамковим магнітом
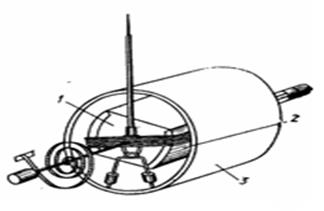
Рис. 2.6. Магнітоелектричний ВМ з внутрішньорамковим магнітом
рухомою рамкою зображено на рис.2.5. В таких механізмах рамка 6 повертається у вузькому проміжку, утвореному магнітопроводом 2 з полюсними наконечниками 8 та осердям 4, виготовленими з магнітом'якого феромагнітного матеріалу. Магнітний потік постійного магніту 1, замикаючись через полюсні наконечники та осердя, проходить у робочому проміжку в радіальному напрямку і утворює там рівномірно-радіальне поле.
Струм до рухомої рамки підводять з допомогою двох спіральних пружин (у механізмах на розтяжках і підвісові – з допомогою розтяжок або підвісу і так званого безмоментного струмопідводу – тонкої пружини з практично незначним протидіючим моментом).
Обертаючий момент Мо утворюється в таких механізмах внаслідок взаємодії струму і в обмотці рухомої рамки з полем постійного магніту:
 , (2.18)
, (2.18)
де В – індукція в зазорі;
S – площа рамки;
w – кількість витків обмотки рамки.
Заспокоєння коливань рухомої частини утворюється головним чином за рахунок вихрових струмів, що виникають у короткозамк-нутому контурі алюмінієвого каркасу рамки при його переміщенні в магнітному полі. Це – каркасне магнітоіндукційне заспокоєння. Заспо-коєння може здійснюватися і за рахунок струмів, що виникають в обмотці рамки від наведеної там при переміщенні рамки електрору-шійної сили. Це – обмоткове магнітоіндукційне заспокоєння, яке використовують в механізмах високої чутливості (гальванометрах). Рамки в таких механізмах виготовляють безкаркасними. Різновидом вимірювального механізму з рухомою рамкою є механізм з внутрішньорамковим магнітом (рис.2.6). Магнітна система такого механізму складається з постійного магніту 1, полюсних накладок 2 і ярма 3.
Застосовують також магнітоелектричні вимірювальні механізми з рухомим магнітом. При проходженні через нерухомі котушки ефект-ричного струму рухомий магніт такого механізму намагається зайняти положення, при якому вісь його намагнічування співпадала б з напрямком магнітного поля котушок, внаслідок чого і виникає обертаючий момент. Недоліком механізмів з рухомим магнітом є порівняно слабке власне магнітне поле, низька точність. Механізми з рухомим магнітом мають простішу конструкцію, менші розміри і більш стійкі до перевантаження порівняно з механізмами із рухомою рамкою.
Електромагнітні ВМ. Існує декілька різновидів електромагнітних ВМ. Електромагнітний механізм з плоскою котушкою подано на рис. 2.7, а. При про-ходженні електричного струму через обмотку 1 всередині котушки утворюється магнітне поле. Під дією цього поля феромагнітне осердя 2, що ексцентрично закріплене на осі, втягуватиметься всередину котушки.
На рис. 2.7,б, зображено електромагнітний вимірю-вальний механізм з круглою котушкою, який складається з нерухомої круглої котушки 1, всередині якої знаходяться нерухоме 2 (закріплене на котушці) та рухоме 3 (закріплене на осі) осердя. Якщо в обмотці котушки проходить струм, то обидва осердя намагнічуються однойменно і відштовхуються одне від одного, утворюючи обертаючий момент.
Широко застосовуються електромагнітні ВМ з магнітопроводом (рис. 2.7,в). У таких механізмах магнітний потік, що утворюється нерухомою котушкою 1 при проходженні по ній струму, замикається головним чином через магнітопровід. Останній складається із неру-хомого осердя 2 та полюсних наконечників 3 і 5, між якими знаходиться рухомий елемент 4. Необхідне значення обертаючого моменту в таких механізмах можна дістати при значно меншому споживанні енергії.
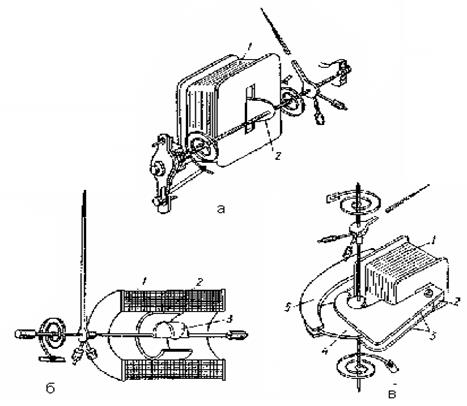
Рис. 2.7. Різновиди електромагнітних ВМ
Обертаючий момент такого механізму:
 . (2.19)
. (2.19)
B електромагнітних ВМ з плоскою й круглою котушками застосовують повітряні заспокоювачі, а в механізмах з магнітопроводом – крапельно-рідинні.
Електродинамічні та феродинамічні ВМ. Будова електроди-намічного ВМ зображена на рис. 2.8. Механізм має нерухому котушку 1, виконану у вигляді двох секцій, між якими проходить наскрізна вісь із закріпленою на ній рухомою котушкою 2. Якщо через котушки проходять струми відповідно і1 та і2 то:
де L1, L2 – індуктивності нерухомої та рухомої котушок; М12 – взаємна індуктивність між ними.
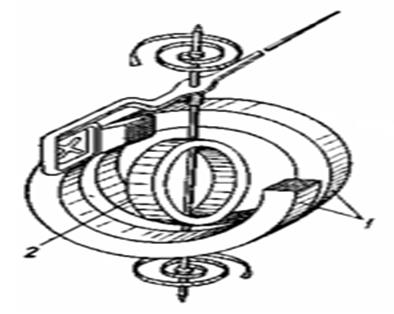
Рис. 2.8. Електродинамічний ВМ
 , (2.20)
, (2.20)
Індуктивності L1 і L2 не залежать від кута повороту рухомої частини, тому обертаючий момент:
 . (2.21)
. (2.21)
Залежність  від кута повороту визначається формою, розмірами та взаємним розміщенням рухомої і нерухомої котушок. Бажаної форми шкали електро-динамічного ВМ досягають зміною характеру цієї залежності. Феродинамічні ВМ (рис. 2.9) за принципом дії становлять одну групу з електродинамічними, але відрізняються від них конструктивно.
від кута повороту визначається формою, розмірами та взаємним розміщенням рухомої і нерухомої котушок. Бажаної форми шкали електро-динамічного ВМ досягають зміною характеру цієї залежності. Феродинамічні ВМ (рис. 2.9) за принципом дії становлять одну групу з електродинамічними, але відрізняються від них конструктивно.
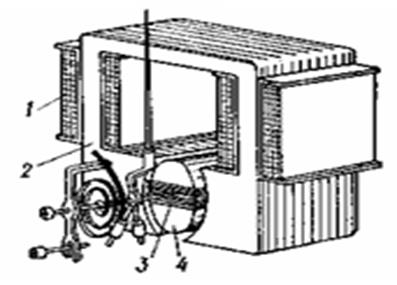
Рис. 2.9. Феродинамічний ВМ
Нерухомі котушки 1, розміщені на магнітопроводі 2, виго-товленому із листового магнітом’якого матеріалу. Безкаркасна рухома рамка 3, розміщена у вузькому робочому проміжку, утвореному магнітопроводом і осердям 4.
Наявність магнітопроводу призводить до значного збільшення обертаючого моменту і зменшення впливу зовнішніх магнітних полів.
Електростатичні ВМ. В електростатичних вимірювальних механізмах для переміщення рухомої частини використовується енергія електростатичного поля рухомих і нерухомих електродів, що перебувають під напругою U та утворюють конденсатор ємністю С, значення якої змінюється при переміщенні рухомої частини.
Залежно від способу зміни ємності розрізняють два основні типи електростатичних вимірювальних механізмів: механізми із змінною активною площею електродів і механізми із змінною відстанню між електродами. У механізмах першого типу (рис. 2.10) нерухомі електроди 2 виготовляють у вигляді однієї або кількох камер, всередині яких розміщуються рухомі електроди 1. Якщо між рухомими та нерухомими електродами існує різниця потенціалів, то на рухому частину діє обертаючий момент:
 , (2.22)
, (2.22)
тобто відхилення рухомої частини електростатичного вимірювального механізму пропорційне квадрату прикладеної напруги.
На рис.2.11, зображено електростатичний ВМ із змінною відстанню між електродами. Між двома нерухомими 1 і 3 знаходиться рухомий електрод 2, підвішений на тонких бронзових стрічках. Напруга підводиться до нерухомих електродів, а рухомий електрод з'єднується електрично з одним із них. При такій схемі з'єднань однойменно заряджені електроди будуть відштовхуватись, а різнойменно – притягуватись. Обертаючий момент пропорційний квадрату прикладеної напруги та зміні ємності між електродами. Протидіючий момент утворюється за рахунок сили тяжіння рухомого електрода і пружності підвісів.
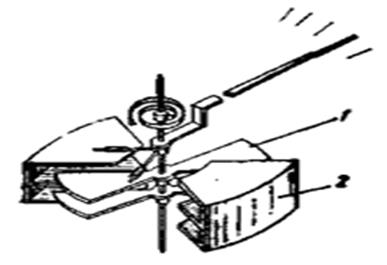
Рис. 2.10. Електростатичний ВМ зі змінною активною площею електродів

Рис. 2.11. Електростатичний ВМ із змінною відстанню між електродами
Вимірювальні механізми із змінною відстанню між електродами використовують лише в кіловольтметрах, а механізми із змінною активною площею, як більш чутливі, також і у вольтметрах.
Індукційні ВМ. Індукційними називаються вимірювальні механізми, переміщення рухомої частини яких здійснюється внаслідок взаємодії змінних магнітних потоків зі струмами, що наведеними в активному елементі рухомої частини. Найпоширеніші індукційні механізми з рухомим диском. Такий механізм має два незалежні магнітопроводи (рис.2.12), магнітні потоки яких перетинають диск і наводять у ньому вихрові струми.
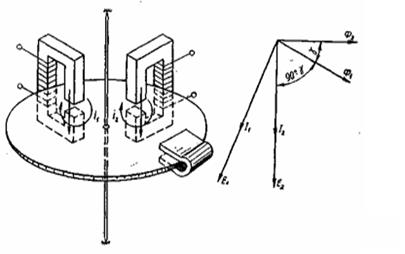
Рис. 2.12. Індуктивний ВМ
Миттєве значення обертаючого моменту, що утворюється в індукційному механізмі внаслідок взаємодії потоку  і вихрового струму
і вихрового струму  ,має вигляд:
,має вигляд:
 , (2.23)
, (2.23)
де k1 – коефіцієнт пропорційності.
Середнє значення цього моменту за період:
 (2.24)
(2.24)
На основі виразу та спрощеної векторної діаграми, побудованої в припущенні, що опір диска чисто активний момент потоку Ф1(Ф2) і струму І2(І1):
 (2.25)
(2.25)
 (2.26)
(2.26)
Протилежність знаків для моментів М1 та M2 зумовлена тим, що один контур втягується, а другий виштовхується з магнітного поля. Напрямки дії обох моментів збігаються і результуючий обертаючий момент дорівнює їх сумі.
Враховуючи, що струми, наведені в активному елементі рухомої частини, відповідно дорівнюють I1=C1wФ1; І2=С2wФ2 (С1 і С2 – коефіцієнти пропорційності), результуючий обертовий момент можна подати у вигляді:
 (2.27)
(2.27)
Застосовують індукційні ВМ головним чином як інтегруючі. В інтегруючих ВМ протидіючий момент відсутній, і при обертанні рухомої частини на неї діє лише гальмівний момент Мг. Останній утворюється внаслідок взаємодії потоку Фм постійного магніту із струмом Ім, що наводиться в диску при його обертанні:
 (2.28)
(2.28)
Нехтуючи тертям, можна вважати, що рівномірна швидкість обертання диска наступить з рівновагою обертаючого та гальмівного моментів, тобто:
 (2.29)
(2.29)
звідки протягом часу t2=t1:
 (2.30)
(2.30)
а число обертів диска:
 . (2.31)
. (2.31)
Інтегруючі індуктивні ВМ застосовують в лічильниках електричної енергії.
2.3. Загальні відомості до вимірювальних приладів прямого перетворення
У вимірювальних приладах прямого перетворення характерним є перетворення вимірювальної інформації тільки в одному напрямку – від входу до виходу вимірювального кола, без зворотного зв'язку. Серед приладів прямого перетворення найбільш поширені електромеханічні. У них вимірювана величина або пропорційний їй сигнал перетворюється за допомогою вимірювального механізму в переміщення покажчика приладу. Залежно від способу перетворення вхідної вимірюваної величини в переміщення рухомої частини і конструктивних особливостей вимірювального механізму їх поділяють на магнітоелектричні, електромагнітні, електро- та феродинамічні, електростатичні, індукційні, теплові, біметалеві, вібраційні. За принципом дії перетворювача розрізняють випрямні, термоелектричні та електронні прилади.
Прилади електромеханічної групи призначені для вимірювання різних електричних величин. Відповідно є амперметри, вольтметри, ватметри, варметри, лічильники електричної енергії, фазометри, омметри, вимірювачі індуктивності і ємності та частотоміри.
Прилади цієї групи є шкальними, тобто приладами з відліковим пристроєм у вигляді шкали і покажчика (стрілкового чи світлового). Виняток становлять лічильники електричної енергії, які є, по суті, цифровими, оскільки їх відліковий пристрій надає вихідному сигналу цифрової форми. Окремим видом аналогових приладів електромеханічної групи є самописці, в яких передбачено запис вихідного сигналу у вигляді діаграми.
Основні технічні характеристики електровимірювальних приладів електромеханічної групи нормовані. Нормуються допустимі значення основної похибки для приладів різного класу точності, допустимі значення зміни показів приладів, спричинені відхиленням умов експлуатації від нормальних, а також основні умовні позначення (табл. 2.1).
Найважливішими зовнішніми факторами, що впливають на роботу вимірювальних приладів електромеханічної групи, є температура навколишнього середовища й зовнішнє магнітне поле
Зменшення впливу зміни температури на покази приладів досягається, звичайно, схемними способами. Для захисту від впливу зовнішнього магнітного поля вимірювальні механізми приладів (особливо електродинамічних та електромагнітних, у яких слабке власне магнітне поле) екранують або виконують астатичними.
Астатичний ВМ поєднує в одному пристрої два ідентичні механізми, рухомі частини яких закріплені на спільній осі. Активні елементи астатичного вимірювального механізму розміщені в просторі і з'єднані між собою електрично так, що утворені ними магнітні поля напрямлені в протилежні сторони. Дія зовнішнього магнітного поля зменшує власне поле одного і збільшує в такій же мірі поле другого активного елемента. При цьому результуючий обертаючий момент, який дорівнює сумі обертаючих моментів окремих механізмів, залишається тим самим, як при наявності зовнішнього поля, так і без нього. При цьому результуючий обертаючий момент, який дорівнює сумі обертаючих моментів окремих механізмів, залишається тим самим, як при наявності зовнішнього поля, так і без нього.
Таблиця 2.1.Основні умовні позначення, які наносяться на шкалах електровимірювальних приладів
| Назва | Умовне позначення |
| Нормальне положення приладу: горизонтальне вертикальне під певним кутом Міцність ізоляції: вимірюване коло ізольоване від корпуса і випробуване при напрузі, наприклад 2 кВ Позначення роду струму: постійний однофазний змінний Позначення принципу дії приладу: (відповідно – прилад з механічним протидіючим моментом і логометр): магнітоелектричний електромагнітний електродинамічний феродинамічний Індукційний Електростатичний Позначення виду перетворення: перетворювач електромеханічний перетворювач напівпровідниковий термоперетворювач ізольований термоперетворювач неізольований |
















|
Повністю усунути вплив зовнішнього магнітного поля можна лише тоді, коли обертаючий момент вимірювального механізму пропорційний першому ступеню вхідної величини, а зовнішнє поле в межах ВМ –рівномірне. Останнім часом перевагу надають екрануванню, як дешевому і досить надійному способу захисту, при цьому вимірювальний механізм поміщають у феромагнітний екран. У сучасних екранованих механізмах застосовують звичайно два екрани. Зовнішній екран виготовляють із сталі, а внутрішній – з пермалою. Сталевий та пермалоєвий екрани мають найбільшу магнітну проникність відповідно в середніх і слабких магнітних полях. Таке поєднання магнітних властивостей двох екранів забезпечує максимальне послаблення дії зовнішнього магнітного поля на вимірювальний механізм.
Запитання
1. Що представляє собою вимірювальний механізм (ВМ) електромеханічних приладів?
2. Як поділяються ВМ в залежності від конструктивних особливостей і виду енергії, яка використовується для утворення рушійних сил?
3. Як визначається робота виконана при повороті рухомої частини ВМ на певний кут?
4. Як визначається обертовий момент ВМ?
5. Чому дорівнює протидіючий момент в приладах з рухомою частиною на розтяжках чи підвісі?
6. Які різновиди опорів існують у ВМ?
7. Коли наступає статична рівновага рухомої частини ВМ?
8. Який вид має рівняння перетворення у ВМ?
9. Для чого застосовуються заспокоювачі у ВМ?
10. Які види заспокоювачів використовуються у ВМ?
11. З яких елементів складається магнітоіндукційний заспо-коювач?
12. Яка конструктивна особливість рідинних заспокоювачів для ВМ?
13. Які існують різновиди магнітоелектричних ВМ?
14. Яка будова і принцип роботи магнітоелектричного ВМ з рухомою рамкою?
15. Яка будова і принцип роботи магнітоелектричного ВМ з внутрішньорамковим магнітом?
16. Які недоліки ВМ з рухомим магнітом?
17. Які існують різновиди електромагнітних ВМ?
18. Як визначається обертовий момент для електромагнітного ВМ з плоскою котушкою?
19. Яка будова і принцип роботи електромагнітного ВМ з круглою котушкою?
20. Яка будова і принцип роботи електромагнітного ВМ з магнітопроводом?
21. Яка будова і принцип роботи електродинамічного ВМ?
22. Як визначається обертовий момент для електродинамічного ВМ?
23. Яка будова і принцип роботи феродинамічного ВМ?
24. Які існують різновиди електростатичних ВМ?
25. Як визначається обертовий момент в електростатичних ВМ зі зміною активної площі електродів?
26. Яка будова і принцип роботи електростатичного ВМ зі змінною відстанню між електродами?
27. Яка будова і принцип роботи індукційного ВМ з рухомим диском?
28. Що являється характерним для вимірювальних приладів прямого перетворення?
29. Як поділяються електричні засоби вимірювання в залежності від способу перетворення вхідної вимірювальної величини в переміщення рухомої частини і конструктивних особливостей ВМ?
30. Які зовнішні фактори найбільше впливають на роботу вимірювальних приладів електромеханічної групи?
31. Як умовно графічно позначається електродинамічний вимі-рювальний прилад?
32. Як умовно графічно позначається індукційний вимірювальний прилад?