
Тема 4 висение и вертикальные режимы полета








4.1 Общая характеристика
К режимам вертикального полета относятся висение, вертикальный набор высоты или снижение вертолета без поступательной скорости.
В летной эксплуатации эти режимы выполняются в следующих случаях: при взлетах или посадках по-вертолетному; при выполнении работ специального назначения (строительно-монтажных, аварийно-спасательных и др.); в учебных целях.
Режимом висения называется такой режим полета, при котором отсут-ствуют перемещения еврокоптера относительно земли.
Контрольное висение выполняется с целью проверки правильности расчета загрузки и центровки, запаса мощности и высоты над препятствием, оценки запасов продольно-поперечного и путевого управления, исправности органов управления и агрегатов еврокоптера.
Вертикальным набором высоты называется установившийся режим полета вертолета с постоянной вертикальной скоростью по восходящей прямолинейной траектории.
Вертикальным снижением называется установившийся режим полета вертолета с постоянной вертикальной скоростью по нисходящей прямолинейной траектории.
Снижение может выполняться как с работающим, так и с неработающим двигателем. Вертикальное снижение с неработающим двигателем относится к особым случаям полета.
Отличительной особенностью висения и вертикальных режимов является
работа несущего винта в условиях осевого обтекания. Для получения необходимой тяги НВ требуется максимальная мощность, поэтому запасы мощности и управления ограничены.
4.2 Схема сил на висении
На режиме висения соблюдаются условия уравновешивания сил и моме-нтов, действующих на вертолет.
На вертолет действуют: подъёмная сила НВ Ун, сила тяжести G, сила тяги хвостового винта Т хв (рис. 38).
Эти силы рассматриваются с учетом балансировочного положения верто-лета - с небольшим правым креном и положительным углом тангажа.
 |
Рис. 38 Схема сил на режиме висения
Условие постоянства высоты:
Н= const YHB = G ;
Условия висения без смещений:
Vx =0 å Fx =0, где Fx - продольные силы;
VZ =0 Т x в= ZHB + GZ
Т x в - сила тяги хвостового винта;
ZHB - боковая сила НВ.
Gz -проекция силы веса при правом крене.
На вертикальных режимах, как и на висении, НВ работает в осевом потоке, поэтому схемы сил аналогичны.
4.3 Тяга НВ на висении
Тягой на висении называется аэродинамическая сила НВ, численно равная весу вертолёта на заданной высоте.
Чем больше вес вертолета, тем больше должна быть тяга НВ на висении, то есть тем больше грузоподъемность вертолета.
Тяга НВ рассчитывается по формуле :
Т = 0,5 СТ ρ(ω r )2 Fн.
На тягу влияют: шаг НВ, число оборотов НВ, плотность воздуха, режим
двигателя, влияние экрана земли, скорость ветра.
СТ - коэффициент тяги НВ. Он зависит от геометрических характеристик НВ, состояния поверхности лопасти, режима работы НВ (осевой или косой обдувки), эффекта экрана земли. Определяется по графику-поляре НВ еврокоптера в зависимости от шага НВ.
Плотность воздуха  зависит от барометрической высоты площадки висения, температуры наружного воздуха.
зависит от барометрической высоты площадки висения, температуры наружного воздуха.
Окружная скорость лопастей HB ωr составляет примерно 200-220м/сек.
Число оборотов НВ еврокоптера в установившемся полёте сохраняется постоянным 390 об/мин и отображается с помощью индикатора 3 (рис. 39).
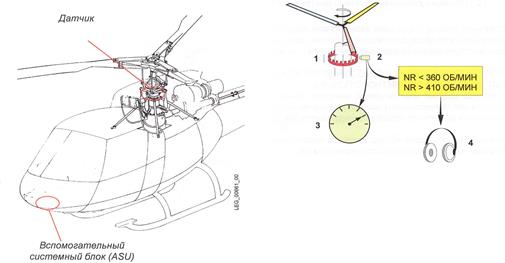 |
Рис. 39 Контроль оборотов НВ
Звуковое предупреждение о низкой частоте вращения НВ<360 об/мин (постоянный тон) и о высокой частоте вращения НВ>410об/мин (прерывистый тон) прослушивается в наушниках 4 (рис. 39).
Ограничения по оборотам несущего винта:
320-375 об/мин - опасный режим;
375-394 об/мин - диапазон рабочих режимов;
394-430 об/мин - опасный режим;
4.4 Влияние экрана земли
 |
При работе НВ вблизи земли индуктивный поток тормозится и растекается по ней. При полном торможении скоростного напора на экранирующей поверхности давление воздуха увеличивается. Под несущим винтом образуется «воздушная подушка», т.е. область повышенного давления (рис. 40).