
Рис. 34 Взаимодействие взмаха лопасти и изменения шага ХВ








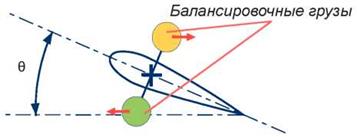
2.5.2 Действие балансировочных грузов
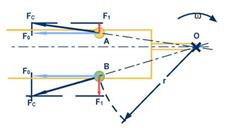
Рассмотрим два элемента лопастей А и В с массой m, которые принадлежат одной секции профиля (рис. 35,а). Они находятся примерно на одинаковом расстоянии r от центра вращения О. Центробежная сила Fс (Fc=mω2р), прилагаемая к элементам А и В, может распределяться на две силы:
- F0 , параллельно оси лопасти; - F1 , перпендикулярно этой оси.
Силы F0 не оказывают воздействия на положение профиля. Силы F1 , напротив, создают по отношению к оси вращения лопасти момент, который может вернуть лопасть в плоское положение.
 | 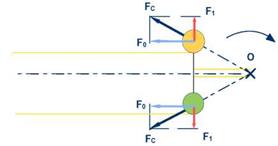 | ||
Когда лопасть находится в плоском положении, момент сил равен нулю.
 |  | ||
а) б)
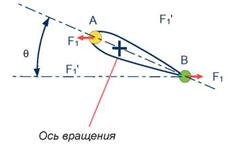
Рис. 35 Действие балансировочных грузов
Балансировочные грузы размещаются параллельно профилю (рис.35,б) и предназначены для равномерного создания момента, противоположного момен-ту возвращения лопасти в плоское положение путем стабилизации профиля при любых значениях шага.
На рис. 35 показано действие балансировочных грузов: видно, что момент балансировочных грузов противодействует моменту возвращения в плоское положение. Это особенно полезно в случае поломки хвостового сервопривода, при которой прекращается работа гидравлического вспомогательного механизма.
2.6 Неисправности хвостового винта
В случае полного или частичного отказа ХВ нарушаются условия путевого равновесия, равенство Мн=Мхв = Трв l рв (рис. 26).
I случай. Возможно разрушение проводки управления или его заклини-вание (еврокоптер не реагирует на отклонение педалей), привод ХВ исправен.
В случае разрушения проводки управления лопасти НВ стремятся перейти к плоскому состоянию. Лопасти устанавливаются на начальный угол закручи-вания 10о (под действием центробежных, аэродинамических и упругих сил). Еврокоптер разворачивается влево.
Равновесие восстанавливается при некотором угле правого скольжения, т.к. при скольжении возникает боковая аэродинамическая сила планера Z пл.
Для сохранения прямолинейного движения создается правый крен в сто-рону скольжения, чтобы добиться уравновешивания поперечных сил: Z пл= Gz.
В случае заклинивания проводки управления углы установки лопастей ХВ соответствуют исходному режиму полета. Поэтому при пониженном режиме двигателя (например, при заходе на посадку) еврокоптер разворачивается вправо. В этом случае он балансируется с левым скольжением и левым креном.
Вывод: При таком виде отказа вертолет не реагирует на отклонение педа-лей, самопроизвольно разворачивается. Наибольшая угловая скорость вращения – при висении.
Действия пилота:
- Сбалансировать вертолет. Балансировка и управление по курсу осущест-вляется отклонением РУ. Например, для разворота вправо РУ отклоняется вправо, создается правый крен и правое скольжение, из-за путевой устойчи-вости вертолет стремится устранить скольжение, т.е. разворачивается вправо.
- Выбрать площадку, пригодную для посадки с пробегом.
- Выполнить посадку с пробегом (желательно против ветра и с боковой составляющей справа).
2 случай. Выход из строя трансмиссии или повреждение ХВ. Тяга ХВ либо уменьшается, либо полностью исчезает.
Признаки отказа:
- Интенсивный разворот влево (под действием несбалансированного реак-тивного момента НВ).
- Кренение вправо (под действием несбалансированного момента крена, вызванного резким уменьшением или исчезновением тяги ХВ).
- При разрушении ХB и хвостового редуктора вертолет резко опускает нос (вследствие нарушения центровки).
Действия пилота:
- На режиме висения плавно уменьшить шаг. Удерживая вертолет от крена и уменьшения тангажа, произвести посадку. Приземление происходит с враще-нием влево. Для предупреждения опрокидывания, после приземления уменьшить шаг НВ до минимального.
- В поступательном полете. Энергично уменьшить ОШ до минимального. Отклонениями РУ удержать вертолет от крена и резкого уменьшения угла тангажа.
Перейти к планированию на авторотации.
- На планировании балансировать вертолет скольжением (созданием крена РУ). Для уменьшения Vу постепенно увеличивать режим работы двигателя.
- Подобрать площадку для посадки с пробегом (по возможности против ветра).
Особенность посадки.
При заходе на посадку необходимо учитывать увеличение разворачиваю-щего момента влево при взятии шага.
Для уменьшения реактивного момента НВ и увеличения стабилизирующе-го момента планера поступательная скорость снижения должна быть больше.
Посадку производить со встречным ветром для уменьшения путевой ско-рости, посадочной дистанции и увеличения запасов управления.
Площадку выбирать для посадки с боковым ветром справа в целях улуч-шения условий путевой балансировки.
При приближении к земле увеличивается шаг НВ. Поэтому вертолет энер-гично разворачивается. ОШ НВ уменьшается, вплоть до минимального. Приземление происходит с большой вертикальной скоростью.
Вывод: Посадка с отказавшим путевым управлением представляет боль-шую сложность.
Технология выполнения полёта и посадки содержится в РЛЭ AS350 B2.
I случай. Разрушение проводки управления; его заклинивание (вертолет не реагирует на отклонение педалей), привод РВ исправен.
Действия пилота.
При заедании педалей или потере их эффективности невозможно изменить тягу хвостового винта при помощи педалей.
-Рычагом общего шага винта и ручкой управления подобрать режим для доведения скорости до 130 км/ч в горизонтальном полете.
В месте, подходящем для посадки:
Необходимо совершить низкий подход с небольшим боковым скольжением влево. При этом боковое скольжение постепенно будет уменьшаться по мере снижения поступательной скорости и применения общего шага несущего винта для смягчения посадки.
ПРЕДУПРЕЖДЕНИЕ:
· ПОСАДКА ВЫПОЛНЯЕТСЯ ЛЕГЧЕ, КОГДА ВЕТЕР ДУЕТ СПРАВА;
· ПРИ СКОРОСТИ МЕНЕЕ 37 км/ч ВЫПОЛНЕНИЕ ВТОРОГО КРУГА НЕВОЗМОЖНО ИЗ-ЗА ПОТЕРИ ЭФФЕКТИВНОСТИ ХВОСТОВОГО ОПЕРЕНИЯ.
2 случай. Полная потеря эффективности хвостового винта (выход из строя трансмиссии или повреждение ХВ).
Признак: вертолет будет рыскать влево с угловой скоростью в зависимости от подводимой мощности и поступательной скорости в момент отказа.
Действия пилота:
При ВИСЕНИИ В ЗОНЕ ЗЕМЛИ (или вне зоны земли, на диаграмме
H-V (высота-скорость) – НЕМЕДЛЕННАЯ ПОСАДКА:
1. FFCL..................................... Уменьшить.
2. Общий шаг несущего винта. Увеличить для мягкой посадки.
При ВИСЕНИИ ВНЕ ЗОНЫ ЗЕМЛИ (Свободная область, вне диаграммы H-V):
Одновременно:
1. Рычаг общего шага.............. Уменьшить, в зависимости от допустимой высоты;
2. Ручку управления................. Вперед для набора скорости
3. Ручкой управления............... Подобрать режим для установки значения Vy и управления рысканием.
ПРЕДУПРЕЖДЕНИЕ:
БЕЗОПАСНАЯ ПОСАДКА НА АВТОРОТАЦИИ НЕ МОЖЕТ БЫТЬ ГАРАНТИРОВАНА В СЛУЧАЕ ВОЗНИКНОВЕНИЯ ОТКАЗА ВИНТА ПРИ ВИСЕНИИ ВНЕ ЗОНЫ ЗЕМЛИ НИЖЕ ВЕРХНЕЙ ТОЧКИ НА ДИАГРАММЕ H-V (СМ. ГЛАВА 5 РЛЭ) ИЛИ В ОГРАНИЧИТЕЛЬНОЙ ОБЛАСТИ.
В поступательном полете — КРЕЙСЕРСКИЙ ПОЛЕТ:
1. Ручкой управления..................... Подобрать режим для установки значения Vy и управления рысканием;
2. Рычаг общего шага винта.......... Уменьшить для устранения бокового скольжения.
ПОДХОД И ПОСАДКА:
1. FFCL ............................... Уменьшить.
2. Выполнить посадку на режиме авторотации.
Выводы: 1. Хвостовой винт еврокоптера – орган путевой управляемости. Эффективность его работы зависит от выполнения требований технической и летной эксплуатации.
2.Тяга и компенсирующий момент хвостового винта на режиме висения зависят от барометрической высоты, скорости и направления боковой обдувки, полетной массы.
3. При отказах путевого управления необходимо руководствоваться рекомендациями РЛЭ в особых случаях полета.