
Рис. 32 Поперечная балансировка еврокоптера








- сила тяги хвостового винта ТХВ. На моторных режимах направлена влево по полету, на режиме самовращения НВ - вправо;
- поперечная сила несущего винта Z н. Представляет собой проекцию силы R н на поперечную ось 0 z. Направлена вправо на моторных режимах и влево - на режиме самовращения НВ. Возникает вследствие бокового завала конуса вращения НВ, вызванного поступательным движением еврокоптера;
- поперечная сила планера Z пл. Появляется при наличии скольжения еврокоптера в случае балансировки без крена (рис.31,б);
- кренящий момент oт несущего винта Мхн. Возникает под действием поперечной силы Z н на плече yн относительно продольной оси 0х. Момент Мхн стремится накренить еврокоптер вправо на моторных режимах и влево - на режиме самовращения НВ;
- кренящий момент от тяги хвостового винта Мхв. Действует на плече h ХВ относительно оси 0х, стремится накренить еврокоптер влево на моторных режимах и вправо - на режиме самовращения НВ.
Еврокоптер находится в состоянии поперечного равновесия, если алгебраические суммы поперечных сил и их моментов относительно продольной оси 0x равны нулю:
ΣFz = Zн+G Z –ТХВ =0,
ΣM x = Zн· y н - ТХВ h ХВ =0.
Балансировка еврокоптера осуществляется поперечными отклонениями ручки управления (РУ). При этом конус вращения НВ отклоняется в балансировочное положение, при котором еврокоптер находится в положении равновесия.
Чтобы полёт выполнялся без скольжения, еврокоптер на моторных режи-мах полёта должен иметь небольшой правый крен, величина которого зависит от режима двигателя.
Следует учитывать, что движение еврокоптера по рысканию (относи-тельно оси Оу) взаимосвязано с его движением по крену (относительно оси Ох).
Поэтому путевое равновесие рассматривается в сочетании с поперечным равновесием вертолета и может осуществляться двумя способами:
- с креном без скольжения (рис. 31,а, 32) и без крена со скольжением (рис. 31,б).
В зависимости от этого условия равновесия сил и моментов имеют следующий вид:
Балансировка без скольжения Балансировка со скольжением
ΣFZ = Z н + G z - ТХВ=0, ΣFZ = Z н + Zф – ТХВ = 0 ,
Σ M У =Мр – M ХВ =0. Σ M У =Мр+ M Ф - ТХВ =0.
а) б)
В полете со скольжением (рис. 31,б) тяга ХВ должна быть больше, чем для балансировки без скольжения, так как необходимо уравновесить дополнительный момент от боковой обдувки фюзеляжа МФ. Поэтому полет со скольжением выполняется с меньшими запасами путевого управления, чем без скольжения.
Путевая балансировка вертолета на заданном режиме осуществляется при определенном моменте, создаваемом тягой хвостового винта МХВ. Следовательно, при переходе на другой режим полета необходимо изменить и тягу ХВ.
Для каждого режима полета можно определить балансировочные углы установки лопастей хвостового винта  ХВ, при которых вертолет будет находиться в состоянии путевого равновесия и должен быть управляемым.
ХВ, при которых вертолет будет находиться в состоянии путевого равновесия и должен быть управляемым.
· Для еврокоптера диапазон изменения углов установки лопастей хвостового винта ХВ составляет от −8º до +23º .
· На всех режимах моторного полета углы ХВ имеют положительное значение, т.e. требуется отклонение правой педали вперед.
· С увеличением скорости полёта балансировочные углы ХВ изменяются в зависимости от потребной мощности НВ. Это объясняется тем, что если изменяется потребная мощность, значит изменяется шаг НВ и его реактивный момент.
· При увеличении мощности двигателя (шага НВ) балансировочные углы ХВ должны быть больше.
При работе двигателя на предельной мощности (висение, вертикальные режимы) тяга ХВ близка к максимальной, а правая педаль отклоняется вперед и приближается к упору. Запас по путевому управлению минимальный.
· В полёте с не подведённой мощностью (авторотация) ХВ переводится на отрицательные углы установки.
· Следует помнить: при нарушении установленных ограничений по скоро-сти бокового ветра, массе вертолета, оборотам НВ потребные углы установки лопастей ХВ могут быть больше максимально допустимых, установленных в РЛЭ еврокоптера. В этом случае возможна нехватка полного хода правой педали – еврокоптер становится неуправляемым и разворачивается влево.
Выводы:
1. Боковое движение еврокоптера состоит из двух связанных между собой движений: по крену и рысканию.
2. В состоянии бокового равновесия сохраняется равенство между собой сил, а также их моментов, действующих в поперечной и горизонтальной плоскостях.
3. Боковая балансировка еврокоптера осуществляется с помощью откло-нений РУ и педалей.
4. С помощью расчётов определяются запасы поперечного и путевого управления еврокоптера на различных режимах полета.
5. На боковую балансировку вертолета основное влияние оказывает рабо-та хвостового винта. Знание особенностей аэродинамики ХВ объясняет физи-ческий смысл летных ограничений еврокоптера.
Ограничения РЛЭ
· Максимальная взлётная масса. Рассчитывается по Диаграммам РЛЭ;
· Скорость бокового ветра: слева 15м/сек; справа 15м/сек;
· Скорость попутного ветра 8м/сек.
· Переход в диапазон опасных режимов – при оборотах несущего винта <360 об/мин.
2.5 Усилия в системе путевого управления
Перемещение педалей между упорами изменяет шаг лопастей хвостового винта от - 8º до + 23º.
В режиме полета, когда тяга винта не равна нулю (угол установки лопасти отличается от нулевого), действует момент возвращения лопастей в плоское положение (частично компенсируемый балансировочными грузами), который стремится вернуть угол установки к нулю.
Благодаря гидравлическому давлению сервопривода преодолевается эффект возвращения винта в плоское положение и тем самым уменьшается усилие пилота на педали управления.
Без гидравлического давления усилие по манипулированию педалями очень значительно (в версиях В1 и В2). В связи с этим, помимо хвостового сервопривода, устанавливается гидравлическое устройство - компенсатор усилий в канале рыскания (рис. 33).
 |
Принцип действия компенсатора
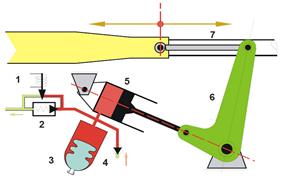 |
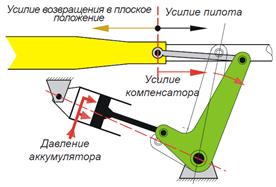
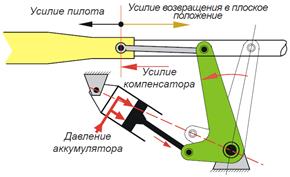
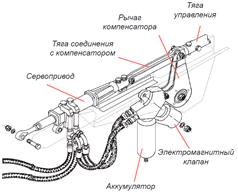
Рис. 33 Компенсатор усилий в канале рыскания
В режиме полета аккумулятор (3) и цилиндр (5) заряжаются гидравлической системой вертолета. Все воздействия на педали приводят к срабатыванию сервопривода.
В случае неисправности гидросистемы (выход из строя насоса, течь и т д.) аккумулятор остается в заряженном состоянии благодаря:
· возвратному клапану (4) в системе под давлением;
· предохранительному клапану (2).
· электромагнитному клапану (1), который всегда закрыт и открывается при управляющем воздействии.
Усилие пилота в сочетании с усилием цилиндра компенсатора уравнове-шивают усилие возвращения лопастей в плоское положение.
2.5.1 Взаимодействие "взмах лопасти - шаг" (соединение K )
Когда рычаг шага наклонен относительно оси балансира (оси взмаха лопастей), возникает взаимодействие "взмах лопастей - шаг" (рис. 34).
Взмах лопастей, который приводит к смещению рычага изменения шага относительно плоскости вращения, в которой проходит ось взмаха, вызывает изменение шага:
· на наступающей лопасти, которая поднимается, шаг уменьшается;
· на отступающей лопасти, которая опускается, шаг увеличивается.
Соединение K обеспечивает то же аэродинамическое воздействие, что и взмах лопастей (см. теоретические сведения о вертолете), однако стремится к дополнительной стабилизации взмаха.
 |