Рис. 27 Влияние боковой обдувки на тягу ХВ








Из рисунков видно, что при воздействии на ХВ боковой обдувки изме-
няются осевые скорости лопастей ХВ, что приводит к изменению углов атаки на лопастях ХВ (рис. 27, рис. 9) .
При обдувке слева углы атаки уменьшаются, поэтому тяга также уменьшается (рис.27,а).
При обдувке справа углы атаки на лопастях ХВ увеличиваются. Это сопро-вождается увеличением тяги ХВ. Но при усилении ветра справа углы атаки в корневых частях лопастей становятся больше критических значений, возникает срыв потока. Кроме этого на ХВ развивается вихревое кольцо. Происходит дополнительное снижение тяги ХВ (рис. 27,б).
2.3.1 Влияние интерференции на тягу ХВ
На еврокоптере имеется взаимное влияние ХВ, НВ и планера, резуль-татом которое будет наложение вихревых потоков, образуемых НВ и ХВ (рис.28). Это явление называется интерференцией.
 |
Рис. 28 Схема образования вихревых жгутов
Из рис. 28 видно, что при работе ХВ на месте (на режиме висения) происходит непрерывное перетекание воздушной массы относительно лопастей НВ снизу вверх. При встречной обдувке (например, от действия ветра) вращающаяся масса воздуха вытягивается в так называемые «вихревые жгуты», взаимодействующие с хвостовым винтом.
На еврокоптере AS350 B2 такое взаимодействие считается полезным («полезная интерференция»), то есть влияние работы несущего винта оказы-вает благоприятное влияние на работу хвостового винта.
Это достигнуто благодаря рациональной компоновке и конструктивным особенностям хвостовой части еврокоптера:
· ХВ имеет рациональное направление вращения, при котором скорости потоков ХВ и НВ складываются. Поэтому равноценная тяга ХВ получается при меньшем значении шага ХВ. Уменьшается влияние срыва потока, сохраняется эффективность ХВ при сильной боковой обдувке;
· Это способствует сохранению безотрывного обтекания лопастей ХВ, предупреждает преждевременный срыв потока, сохраняется эффективность ХВ при сильной боковой обдувке и при работе на большом шаге;
· ХВ частично вынесен из зоны затенения вертикального стабилизатора (киля), см. рис.1;
· Используется ХВ толкающего типа, поэтому зазор между втулкой ХВ и килём выбран оптимальным, чтобы в сочетании с минимальной площадью перекрытия плоскости вращения ХВ потеря тяги винта была сведена к минимуму.
Вследствие более рационального размещения ХВ (справа по полёту) потеря тяги ХВ толкающего типа значительно меньше, чем для винтов «тянущего» типа;
· На хвостовой балке установлен обтекатель хвостовой трансмиссии (рис.1), который позволяет ослабить отрицательное влияние возмущённого воздушного потока, отбрасываемого от НВ к ХВ. При этом усиливается полезная интерференция между НВ, ХВ и планером еврокоптера.
· Благодаря установке вертикального стабилизатора с асимметричным профилем (рис. 29) достигается увеличение боковой аэродинамической силы хвостовой части, тем самым усиливается эффективность работы ХВ.
2.3.2 Особенность вертикальных стабилизаторов
В крейсерском режиме полета асимметричный профиль NACA верхнего вертикального стабилизатора создает аэродинамическую силу F1, которая противодействует реактивному моменту несущего винта и воздействует в направлении толкания хвостового винта, что позволяет уменьшить шаг ХВ и снизить потребляемую мощность (рис. 29).
Нижний стабилизатор имеет симметричный профиль NACA, который обеспечивает путевую устойчивость.
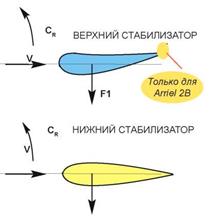 |
Рис. 29 Влияние вертикального стабилизатора
Вывод:
1. Аэродинамические характеристики ХВ оказывают влияние на запасы путевого управления вертолетом;
2. Минимальный запас путевого управления получается на висении с предельной массой, при пониженной плотности воздуха, при боковом ветре;
3. При нарушении установленных ограничений по скорости бокового ветра на висении с предельной взлетной массой возможна нехватка хода правой педали. При полностью отклоненной вперед правой педали еврокоптер может перейти к неуправляемому левому вращению.
4. На еврокоптере достигнута высокая эффективность путевого управления, позволяющая эксплуатировать еврокоптер при сильном боковом и попутном ветре без потери эффективности ХВ равнозначно как при правой, так и при левой боковой обдувках.
2.4 Боковая балансировка еврокоптера
Целью боковой балансировки еврокоптера является сохранение равно-весия сил и моментов, действующих относительно нормальной оси 0у и про-дольной оси О x.
 |
а)
б)
Рис. 31 Способы путевой балансировки
На еврокоптер относительно оси Оу действуют следующие моменты рыскания (рис. 31):
· реактивный момент несущего винта МНВ. Он образуется из-за действия крутящего момента двигателя, подводимого к НВ для преодоления сил сопротивления вращению лопастей НВ, и направлен против вращения НB. Он передается со стороны втулки на корпус вертолёта, стремится развернуть вертолет влево;
· момент от тяги хвостового винта МХВ =ТХВ LХВ. Действует на плече LХВ за счет выноса ХВ относительно центра масс вертолета. Стремится развернуть вертолет вправо.
На режиме полёта с не подведённой мощностью (самовращении НВ) под действием крутящего момента НВ еврокоптер разворачивается вправо. Поэтому ХB переводится на отрицательные углы установки и момент МХВ имеет противоположное направление, т.e. разворачивает вертолет влево;
· момент рыскания от боковой силы планера Мпл . Возникает в полете со скольжением (рис. 31,б). В этом случае центр давления фюзеляжа находится позади центра масс вертолета на расстоянии LФ. Мпл= ZплLф.
На моторных режимах полета боковая сила планера Z пл направлена вправо по полету и момент Мпл действует влево. На режиме самовращения Мпл действует вправо. Следовательно, на любом режиме полета момент рыскания планера М пл совпадает по направлению с реактивным (крутящим на РСНВ) моментом НВ.
В поперечной плоскости относительно оси Оx на еврокоптер действуют следующие силы и моменты (рис. 32):