
Информация от ОРЛ-Т используется диспетчерами районного центра УВД, иногда диспетчерами подхода и синоптиками. Часто ОРЛ-Т резервируют работу аэродромных обзорных радиолокаторов.








При использовании ОРЛ-Т в составе АС УВД они обязательно сопрягаются с вторичными радиолокаторами, образуя радиолокационный комплекс.
Размещение:
ОРЛ-Т устанавливают на значительном удалении (до 5 км) от аэродромного командно-диспетчерского пункта (АКДП) и ориентируют относительно северного направления истинного меридиана. Для обеспечения радиолокационного контроля за полётами ВС в секторах прохождения воздушных трасс антенны ОРЛ-Т устанавливают на возвышении с тем, чтобы величины углов закрытия по углу места не превышали 0,5° в этих секторах.
Основными требованиями к ОРЛ-Т являются обеспечение большой дальности действия, достигающей 350…400 км при больших высотах полёта ВС. Кроме того, должна обеспечиваться высокая разрешающая способность по дальности (не более 1000 м) и по азимуту (не более 1,3°), а также точность измерения азимута и удаления ВС.
В ОРЛ-Т используется круговой обзор с периодом 10 секунд (допускается 20 секунд).
Состав:
антенно-фидерная система (АФС);
приемно-передающая аппаратура первичного канала;
приемно-передающая аппаратура вторичного канала (при наличии);
АПОИ – аппаратура первичной цифровой обработки радиолокационной информации (при сопряжении с АС УВД);
аппаратура передачи данных по узкополосной линии связи (при сопряжении с АС УВД);
система ТУ-ТС – телеуправления, контроля и телесигнализации для дистанционной эксплуатации ОРЛ-Т техническим составом;
комплект эксплуатационной документации и ЗИП (запасное имущество и приспособления).
Особенности:
· Применение цифровой системы СДЦ (селекция движущихся целей)
· Применение переменного периода повторения зондирующего сигнала для борьбы с помехами от целей, удаленных от РЛС на расстояние, превышающее максимальную дальность действия РЛС
· Применение автоматического управления положением нижней кромки зоны обзора РЛС в вертикальной плоскости благодаря использованию двухлучевой ДНА и формированию взвешенной суммы сигналов верхнего и нижнего лучей.
23. Каково назначение, структура, особенности функционирования и размещения аэродромных радиолокаторов (ОРЛ-А)?
Аэродромные обзорные РЛС предназначены для контроля и УВД в районе аэродрома и ввода ВС в зону действия средств посадки. ОРЛ-А обеспечивают обнаружение ВС и измерение их полярных координат (азимут и дальность) с последующим представлением информации о воздушной обстановке в центры (пункты) ОВД.
Информация от ОРЛ-А используется диспетчерами подхода, круга и посадки.
При использовании ОРЛ-А в составе АС УВД они обязательно сопрягаются с вторичными радиолокаторами, образуя радиолокационный комплекс, и имеют в своём составе АПОИ.
Размещение:
ОРЛ-А устанавливают, как правило, вблизи КТА аэродрома, но не ближе 120 м от оси ВПП и на удалении не более 3 км от АКДП. ОРЛ-А ориентируют относительно северного направления магнитного меридиана. Для обеспечения радиолокационного контроля за полётами ВС в секторах ответственности аэродромной зоны ОВД (в направлениях коридоров аэродрома) антенны ОРЛ-А устанавливают на позиции так, чтобы величины углов закрытия по углу места не превышали 0,5°. Часто ОРЛ-А совмещают с посадочным радиолокатором и автоматическим радиопеленгатором при обеспечении минимально-допустимого расстояния между ними.
Основным требованием к ОРЛ-А является обеспечение достаточной максимальной дальности действия на высотах не менее 6100 м и небольшой минимальной дальности. Все ОРЛ-А разделяются на два варианта: Б1 с максимальной дальностью 160 км и минимальной – 2 км и Б2 с максимальной дальностью 50…100 км и минимальной – 1,5 км. В ОРЛ-А используется круговой обзор с периодом не более 6 секунд.
Состав:
антенно-фидерная система (АФС);
приемно-передающая аппаратура первичного канала;
приемно-передающая аппаратура вторичного канала (при наличии);
АПОИ – аппаратура первичной цифровой обработки радиолокационной информации (при сопряжении с АО или АС УВД);
аппаратура передачи данных по узкополосной линии связи (при сопряжении с АС УВД);
система ТУ-ТС – телеуправления, контроля и телесигнализации для дистанционной эксплуатации ОРЛ-А техническим составом;
комплект эксплуатационной документации и ЗИП (запасное имущество и приспособления).
ОРЛ-А сопрягаются с аппаратурой отображения типа «СИМВОЛ-Д», «ЗНАК», «КОРИНФ», «НОРД», КАРМ-ДРУ или с АС УВД.
Основными разновидностями ОРЛ-А, используемыми в России, являются ДРЛС-7с (и модификации), радиолокационные комплексы «ИРТЫШ», «СКАЛА-МПА», «ЭКРАН-85» (АОРЛ-85).
24. Посадочные РЛС (РЛС-П); Каковы назначение, структура, особенности размещения РЛС-П, информация, отображаемая на индикаторах РЛС-П?
Посадочные РЛС являются основной частью радиолокационных систем посадки. РЛС-П предназначены для контроля за положением ВС относительно заданных линий курса и глиссады снижения, а также за удалением ВС от точки приземления с целью передачи диспетчером посадки управляющих команд пилоту ВС, заходящего на посадку. При выборе иных систем посадки РЛС-П могут использоваться только для контроля и документирования процесса посадки ВС.
РЛС-П включаются за 30 минут до расчётного времени прибытия (ЕТА)
по запросу экипажа ВС;
при сложных метеоусловиях (высота нижней кромки облачности равна или ниже высоты круга и метеорологическая дальность видимости менее 5 км);
при аварии на борту ВС;
при выполнении специальных, особо важных рейсов ВС.
Размещение:
РЛС-П размещается на одинаковом расстоянии от противоположных порогов ВПП и на удалении 120…200 метров в любую сторону от оси ВПП. При длине ВПП менее 1500 метров РЛС-П размещается не ближе 750 метров от порога ВПП основного направления посадки аэродрома.
Зона приземления ВС должна находится в рабочем секторе РЛС-П ±15° или в секторе от +20° до –10° по курсу посадки. В этом секторе не должно быть естественных или искусственных препятствий распространению радиоволн, образующих углы закрытия более 0,5° относительно высоты расположения курсовой антенны.
Состав:
антенно-фидерная система (АФС);
приемно-передающая аппаратура;
аппаратура обработки радиолокационной информации;
аппаратура передачи данных;
устройство генерирования линий курса и глиссады, линий равных и допустимых отклонений, линий равных высот и др.;
индикаторная аппаратура;
система ТУ-ТС – телеуправления, контроля и телесигнализации для дистанционной эксплуатации РЛС-П;
комплект эксплуатационной документации и ЗИП.
Основными разновидностями РЛС-П, используемыми в России, являются РП-3Г, РП-4Г, РП-5Г.
Характерные особенности:
Антенная система состоит из 2-х антенн: курсовой и глиссадной
Для получения высоких угловых разрешающих способностей курсовая антенна должна иметь узкую ДН в горизонтальной плоскости, а глиссадная - в вертикальной.
Возможность выбора поляризации антенны от линейной до эллиптической позволяет значит ослабить влияние помех.
Информация, отображаемая на индикаторах:
линии курса и глиссады
векторы курсовой и глиссадной скоростей
25. РЛС обзора лётного поля. Каковы назначение, состав, размещение и особенности функционирования?
РЛС обзора лётного поля предназначены для обнаружения и наблюдения за ВС, спецавтотранспортом, техническими средствами и другими объектами, находящимися на ВПП, РД и перроне, а также для контроля и управления движением ВС по ВПП и РД во время руления, старта и после приземления.
Антенная система РЛС ОЛП устанавливается на мачте или высоком сооружении таким образом, чтобы был обеспечен радиолокационный обзор всей необходимой площади аэродрома с учётом возможности РЛС по максимальной и минимальной дальности обнаружения. Не допускается расположение каких-либо металлических конструкций (мачт, антенн и т.п.) выше установки антенной системы РЛС ОЛП в радиусе 50 метров от неё.
Состав:
антенно-фидерная система (АФС);
приемно-передающая аппаратура;
аппаратура обработки радиолокационной информации (преобразования сигналов РЛС в телевизионный сигнал);
аппаратура передачи данных;
аппаратура индикации;
система ТУ-ТС – телеуправления, контроля и телесигнализации для дистанционной эксплуатации РЛС-ОЛП;
комплект эксплуатационной документации и ЗИП.
Основным видом РЛС ОЛП, используемых в России в настоящее время, является ASTRE 2 французской фирмы Thompson.
Для борьбы с сигналами от гидрометеоров используется поляризационные решетки, расположенные перед облучателями антенн. Антенны закрываются радиопрозрачным покрытием. Для повышения эффективности использования радиолокаторов разработана специальная аппаратура преобразования радиолокационных сигналов в телевизионные.
26. Метеорологические РЛС (МРЛ). Каковы назначение, состав, особенности функционирования МРЛ
Метеорологические РЛС служат для анализа метеорологической обстановки с целью повышения безопасности и регулярности полётов ВС. МРЛ позволяют непрерывно наблюдать за атмосферными образованиями (например, грозовыми очагами) в области пространства радиусом до нескольких сотен километров. Информация, полученная метеорологическими РЛС, передаётся в метеослужбу аэропорта и на диспетчерские ИВО для использования при организации и управлении воздушным движением.
Состав:
антенно-фидерная система (АФС);
приемно-передающая аппаратура;
аппаратура обработки радиолокационной информации;
аппаратура передачи данных;
аппаратура индикации;
система ТУ-ТС – телеуправления, контроля и телесигнализации для дистанционной эксплуатации МРЛ;
комплект эксплуатационной документации и ЗИП.
Принцип использования РЛС для метеорологических нужд основан на свойстве отражения гидрометеорами зондирующих посылок. Возможность радиолокационного наблюдения за метеообстановкой появилась после освоения сантиметрового и миллиметрового диапазонов радиоволн. В этих диапазонах элементы метеообразований (облаков) имеют большую отражающую поверхность, чем в длинноволновых диапазонах и, кроме того, чем меньше длина волны, тем больше возможность создать антенны с узконаправленными ДН антенн, обеспечивающих высокий энергетический потенциал МРЛС за счет увеличения их коэффициента усиления. Это позволяет обнаруживать облачные образования с высокой вероятностью (0,8…0,9) на значительных (250...300 км) удалениях, причем на больших дальностях лучше обнаруживаются облака, содержащие крупные метеоэлементы.
В МРЛС применяются иглообразные, очень узкие ДНА с углом раскрыва от 13' до 1,5°, которые могут обеспечить достаточно точное определение границ облачности.
Для создания игольчатых ДН используется антенное устройство, состоящее из двух параболических зеркал-отражателей. При использовании одного зеркала разделение сигналов по частоте производится волноводами, имеющими разные размеры в поперечном сечении.
Антенна обеспечивает несколько режимов обзора пространства. Для этого она может вращаться вкруговую и качаться в вертикальной плоскости. Угол качания изменяется от небольших минусовых значений относительно горизонтали до углов, на 5... 15° перекрывающих положение вертикали.
Визуальная индикация метеообразований осуществляется на индикаторах трех типов: кругового обзора (ИКО), «дальность-высота» (ИДВ) и амплитудном (ИА).
На ИКО в одном из выбранных масштабов создается изображение метеообстановки вокруг РЛС при постоянном или переменном угле места антенны. С экрана ИКО могут быть визуально измерены дальность по круговым меткам и азимут по шкале, нанесенной на внешнем кольце ИКО.
Передача метеоинформации осуществляется аналоговыми сигналами по факсимальным каналам, цифровыми кодами по узкополосным линиям и открытыми словесными сообщениями по телефонным каналам.
27. Поясните назначение, структуру, размещение и функционирование многопозиционных радиотехнических средств контроля за выдерживанием высоты полёта ВС в условиях сокращённых минимумов вертикального эшелонирования (RVSM).
Многопозиционная система наблюдения (МПСН) — это вторичный радиолокатор, в котором координаты целей измеряются с помощью разностно-дальномерного метода через сеть территориально-распределенных станций (сенсоров спутникозависимого наблюдения ADS-B, АЗН-В).
Как и в любом вторичном радиолокаторе, наземный запросчик излучает запрос, ответчик на борту воздушного судна принимает запрос и формирует ответ, который принимается системой. Этот ответ используется для измерения положения воздушного судна, а также в нем передаётся дополнительная информация: в первую очередь, высота и идентификация. Но если традиционный локатор измеряет дальность и направление на воздушное судно, для чего используется вращающаяся антенна с узким лучом, то станции МПСН принимают сигналы от целей со всех направлений, а координаты воздушного судна вычисляются по задержке времени прихода сигнала на разные станции.
МПСН «Тетра-М» предназначена для приема сигналов от воздушных судов (ВС), оборудованных самолетным ответчиком режима А/С, S, выполняющих полеты в условиях сокращенных интервалов вертикального эшелонирования, определения их местоположения, сопровождения, идентификации и вычисления величин отклонения ВС от заданного эшелона полета (ЭП) (Assigned altitude deviation (AAD), оценку суммарной ошибки по высоте (Total vertical error (TVE) и погрешности системы измерения высоты (Altimetry system error (ASE) и выдачи информации потребителям.
Зоной действия МПСН «Тетра-М» является область пространства, внутри которой обеспечивается измерение характеристик выдерживания относительной высоты по ВС, совершающим горизонтальный и прямолинейный полет на эшелонах полета от ЭП 290 (8850 метров) до ЭП 410 (12500 метров) включительно в течение 30 секунд или более.
МПСН «Тетра-М» построена по модульному принципу, объединяющему отдельные функциональные модули волоконно-оптическими линиями связи, Ethernet линиями, или радиолиниями.
Состав МПСН «Тетра-М»:
- приемные станции (от 5 до 10 шт);
- программно-технический комплекс обработки информации;
- выносной терминал управления;
- комплект ЗИП.
Основные функции:
- прием информации от ПрС;
- определение координат и параметров ВС;
- получение метеорологических данных;
- вычисление TVE, AAD и ASE;
- выдачу «предупреждения» при превышении заранее установленных значений TVE, ASE или AAD;
- диагностику, мониторинг и управление основными элементами системы;
- формирование отчетной документации и выдачу её потребителям;
- регистрацию принятых метеорологических данных и результатов обработки данных;
- хранение зарегистрированной информации в течение не менее 30 суток.
28. Системы вторичной радиолокации (ВРЛ); Каковы назначение, состав, разновидности, структура и содержание запросных и ответных сигналов?
Вторичные РЛС предназначены для обнаружения ВС, измерения полярных координат (азимут и дальность), запроса и приёма дополнительной полётной информации от ВС, оборудованных самолётными радиоответчиками (СРО), с последующим представлением координатной и полётной информации в центры (пункты) ОВД.
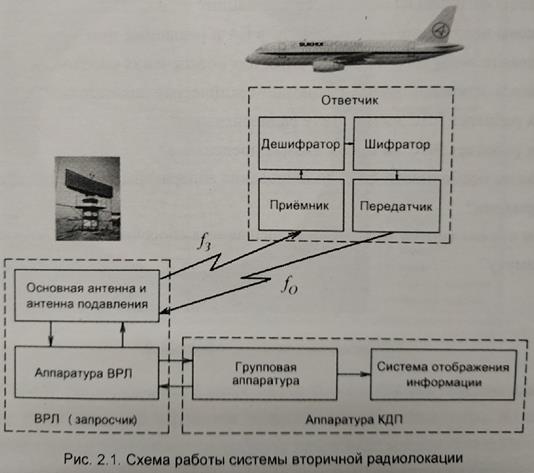
Система вторичной радиолокации (СВРЛ) представляет собой разнесённый в пространстве единый радиотехнический комплекс, состоящий из запросчика и ответчика, соединенных между собой линией связи.
СВРЛ состоит из множества наземных ВРЛ, работающих в режиме кругового обзора. Антенна ВРЛ формирует узкий в горизонтальной плоскости и широкий (до 45°) в вертикальной плоскости луч. При облучении ВС его ответчик принимает кодированный запросный сигнал и излучает всенаправленной антенной ответный радиосигнал, в котором закодирована запрашиваемая локатором полётная и иная информация.
Этот сигнал служит для получения координатной (азимут и дальность) информации в виде отметки ВС на экране ИВО, а также для получения буквенно-цифровой информации, представляемой диспетчеру УВД в виде формуляра, сопровождающего координатную отметку при перемещении ВС.
В настоящее время в ГА применяются два вида стандартов (режимов) функционирования систем ВРЛ: отечественный «УВД» и международный «RBS». Основные отличия этих режимов состоят в использовании различных несущих радиочастот, различных запросных кодов и способов кодирования ответных сигналов.
В современных СВРЛ несущая частота радиосигналов запроса в режимах «RBS» и «УВД-M» fз = 1030 МГц при вертикальной поляризации радиосигналов. В режиме «УВД» допускается использование fз = 837,5 МГц при горизонтальной поляризации. Несущая частота радиосигналов ответа в режиме «RBS» fО = 1090 МГц при вертикальной поляризации, а в режиме «УВД» fО = 740 МГц при горизонтальной поляризации или fО = 1090 МГц для режима «УВД-М».