
Дальномерный метод заключается в определении местоположения цели М (рис. 1.7, а) измерением расстояний между целью и опорными пунктами О1 и О2.








Каждая поверхность положения представляет собой сферу с центром в опорном пункте и радиусом, равным дальности. Так как точки М, О1 и О2 находятся в одной плоскости, то поверхности положения переходят в окружности радиусами О1M = Д1 и О2M = Д2 с точкой пересечения на цели М. Имеется еще одна точка пересечения окружностей, но неоднозначность измерений можно исключить.
Достоинства дальномерного метода:
1. Поскольку измерение времени задержки сигнала может производиться с малыми погрешностями, дальномерные РНС позволяют найти координаты с высокой точностью.
Недостатки дальномерного метода:
1. Так как окружности пересекаются в двух точках, то возникает неоднозначность отсчета, для исключения которой применяют дополнительные средства ориентирования, точность которых может быть невысокой, но достаточной для достоверного выбора одной из двух точек пересечения.
11. В чём заключаются преимущества угломерно-дальномерного метода местоопределения объектов?
Угломерно-дальномерный метод обладает уникальным свойством – возможностью нахождения местоположения ВС при наличии всего лишь одной навигационной точки с известными координатами. При этом местонахождение ВС определяется пересечением линий положения – окружности постоянной дальности и прямой постоянного пеленга, построенных из одной навигационной точки.
Дальномерно-угломерный метод требует применения только одной станции, содержащей радиодальномер и радиопеленгатор. Из точки стояния станции O дальномер определяет наклонную дальность цели ОМ = Д, а пеленгатор устанавливает направление на цель, т. е. ее азимут α и угол места β. Цель М находится на пересечении поверхности положения дальномера в виде сферы радиуса ОМ = Д и линии положения пеленгатора — в виде прямой с угловыми координатами α и β, проходящей через точку О. Этот метод 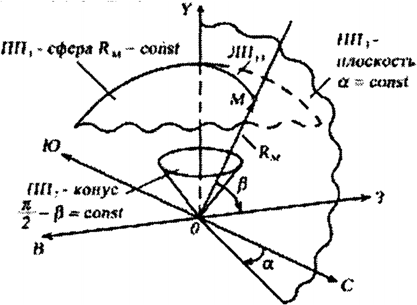
наиболее характерен для радиолокации, а остальные методы — для радионавигации.
Однако и в радиолокации местоположение цели определяют иногда из двух и более точек. Например, если обычная PЛС производит пеленгацию с большими ошибками, то прибегают к дальномерному методу, а если дальномерную часть РЛС нельзя использовать из-за сильных помех или вследствие применения пассивной радиолокации, то прибегают к пеленгационному методу.
12. Каковы особенности разностно-дальномерного метода определения местоположения ВС?
Разностно-дальномерный метод основан на определении разности дальностей между ВС и наземными навигационными точками, но сами расстояния до навигационных точек не измеряются. При этом линии положения на плоскости имеют вид гипербол, по пересечению которых возможно определение местоположения ВС.
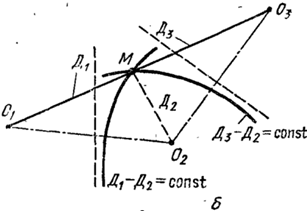 Разностно-дальномерный метод (рис. 1.7, б) требует наличия на плоскости двух пар опорных пунктов О1, О2 и О2, О3. Один из них обычно общий (О2). Каждая пара станций используется для получения линий положения в виде гипербол с фокусами в опорных пунктах. Эти линии строятся как геометрические места точек с постоянной разностью расстояний: Д1- Д2=const от О1 и О2; Д3- Д2=const от О2 и О3. Точка пересечения гипербол совпадает с целью М.
Разностно-дальномерный метод (рис. 1.7, б) требует наличия на плоскости двух пар опорных пунктов О1, О2 и О2, О3. Один из них обычно общий (О2). Каждая пара станций используется для получения линий положения в виде гипербол с фокусами в опорных пунктах. Эти линии строятся как геометрические места точек с постоянной разностью расстояний: Д1- Д2=const от О1 и О2; Д3- Д2=const от О2 и О3. Точка пересечения гипербол совпадает с целью М.
13. Поясните понятие «разрешающая способность РЛС по дальности и угловым координатам». Каковы методы её улучшения?
Разрешающая способность по дальности – это способность раздельного наблюдения целей, расположенных близко между собой по дальности. Она определяется минимальным расстоянием между двумя расположенными на одном азимуте относительно РЛС целями, например, ВС, при котором возможно их раздельное наблюдение.
Реальная разрешающая способность по дальности определяется следующим образом:

где  – потенциальная разрешающая способность РЛС по дальности;
– потенциальная разрешающая способность РЛС по дальности;
 – разрешающая способность индикатора по дальности.
– разрешающая способность индикатора по дальности.
Потенциальная разрешающая способность по дальности определяется длительностью зондирующих сигналов τИ:
Разрешающая способность индикатора по дальности определяется характеристиками самого индикатора. В частности, для индикатора на основе электронно-лучевой трубки справедлива формула
где dп – диаметр рисующего пятна; М – масштаб изображения.
В свою очередь, масштаб изображения может быть описан формулой

Где Dэкр – рабочий диаметр экрана, Rразв – дальность, воспроизводимая на развертке в электронно-лучевой трубке индикатора кругового обзора.
Разрешающая способность по азимуту – это способность раздельного наблюдения целей, расположенных на разных, но близких по значению азимутах относительно РЛС и на одинаковом удалении. Она определяется минимальным значением утла между направлениями на две цели (например, ВС) находящиеся на одной дальности от РЛС, при котором возможно их раздельное наблюдение.
Реальная разрешающая способность по азимуту определяется следующим образом:

где  – потенциальная разрешающая способность РЛС по азимуту;
– потенциальная разрешающая способность РЛС по азимуту;
 – разрешающая способность индикатора кругового обзора по азимуту.
– разрешающая способность индикатора кругового обзора по азимуту.
Потенциальная разрешающая способность по азимуту определяется ДН антенны РЛС:

где ϴО,5 – ширина ДН антенны в горизонтальной (азимутальной) плоскости по половинной мощности излучения - (0,5).
Разрешающая способность ИКО по азимуту определяется характеристиками самого индикатора. Для индикатора в виде электронно-лучевой трубки справедлива формула
где l – расстояние на экране от начала развёртки до отметки цели (например, ВС) на экране ИКО; Q – качество фокусировки, определяемое числом рисующих пятен с диаметром dп, укладывающихся на рабочем диаметре экрана Dэкр.
Таким образом, разрешающая способность по азимуту зависит от местоположения цели и тем она больше, чем дальше от центра экрана расположена отметка радиолокационной цели.
Методы улучшения:
1)Байесовский метод (Вероятность определяется как степень уверенности в истинности суждения.)
2)Обобщающий метод максимального правдоподобия
3)Метод спектрального оценивания
4)Проекционный метод
5)Метод сверх разрешения
14. Какой метод измерения дальности обладает разрешающей способностью по дальности и почему?
Импульсный метод измерения дальности основывается на определении времени запаздывания характерного изменения амплитуды принимаемого радиолокационного сигнала. Антенна РЛС посылает мощный радиоимпульс, который отражается от цели и ей же и принимается. Идею импульсного метода радионавигационных измерений можно пояснить на примере работы самолетного радиодальномера. На ВС устанавливается импульсный приемопередатчик с антенной, называемый запросчиком. На земле в точке с известными координатами располагается ретранслятор, способный принимать сигналы запросчика и переизлучать их. Т.к. скорость распространения СВЧ сигнала, в виде которого распространяется радиоимпульс, много больше скорости цели, то в хорошем приближении цель можно считать неподвижной. Тогда время, за которое радиосигнал достигнет цели – tпрямого равняется времени, за которое отраженный сигнал достигнет антенны РЛС – tотр. Т. е. tпрямого = tотр = t.
Т. е. сигнал, испущенный антенной РЛС, вернется на нее в отраженном виде через время tD = tпрямого + tотр = 2t. СВЧ сигналы распространяются с постоянной скоростью, поэтому D = c × t. Мы учли, что скорость распространения СВЧ сигнала в воздухе примерно равна его скорости распространения в вакууме - c. Учтем предыдущее выражение, и запишем равенство, определяющее дальность D в зависимости от времени запаздывания tD

Импульсный метод лежит также в основе функционирования радиолокационных средств. Бортовые радиолокаторы излучают зондирующие импульсы в направлении наблюдаемых наземных или атмосферных объектов. Эти сигналы отражаются объектами, принимаются на ВС, где определяется время их запаздывания относительно зондирующих импульсов. По времени запаздывания огибающей импульсов рассчитывается расстояние до отражающих объектов.

Для того, чтобы постоянно определять дальность, РЛС должна испускать периодическую последовательность импульсов, – работать в импульсном режиме. Проанализированных данных достаточно, чтобы построить общую структурную схему.
Система синхронизации определяет импульсную работу РЛС. Она формирует видеоимпульсы через постоянные промежутки времени Ти. Ти называют периодом повторения импульса. Система синхронизации определяет период работы – один цикл определения дальности.
Передатчик включается получив очередной импульс от системы синхронизации и на промежутке времени τи формирует сигнал требуемой мощности, амплитуды и частоты. τи – длительность импульса.
На протяжении времени длительности импульса антенный переключатель направляет излучаемый сигнал на антенну. Затем переключается на приемник. Таким образом до конца периода система “ждет” отраженного сигнала. Заметим, что на переключение антенна затрачивает определенное время tдоп.
Приемник выделяет огибающую принятого сигнала и передает на оконечное устройство.
Оконечное устройство обычно выполняется в виде ЭЛТ, на экране которой расстояние между двумя соседними разновысокими пиками соответствует расстоянию до цели.
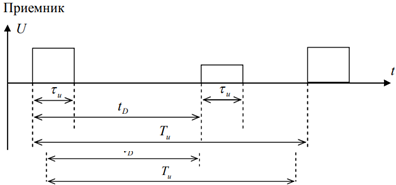
Схематические графики зависимостей U(t) на разных структурных элементах будут выглядеть следующим образом:
Импульсный метод измерения дальности обладает разрешающей способностью по дальности, так как излучаемый сигнал в импульсном методе представляет собой последовательность коротких радиоимпульсов (серии колебаний высокой частоты). Одни импульсы сигнала могут отражаться от одного объекта, другие импульсы этого же сигнала от другого объекта. Далее они поступают на приемник, затем по задержке определяется расстояние до каждого объекта. Если расстояние между объектами больше разрешающей способности, то на экране высветятся две отдельные точки.
В частотном и фазовом методах в качестве сигнала служит непрерывное колебание, т.к. это одно колебание, то отразившись от первого (ближнего) объекта, сигнал направляется в приемник. В данном случае, если имелся второй объект, то до него сигнал не дошел.
Достоинства импульсного метода измерения дальности:
возможность построения РЛС с одной антенной;
простота индикаторного устройства;
удобство измерения дальности нескольких целей;
простота излучаемых импульсов, длящихся очень малое время τи, и принимаемых сигналов;
Недостатки:
необходимость использования больших импульсных мощностей передатчика;
невозможность измерения малых дальностей
большая мертвая зона
15. В чём заключаются достоинства частотного и фазового методов измерения дальности?
Частотный метод
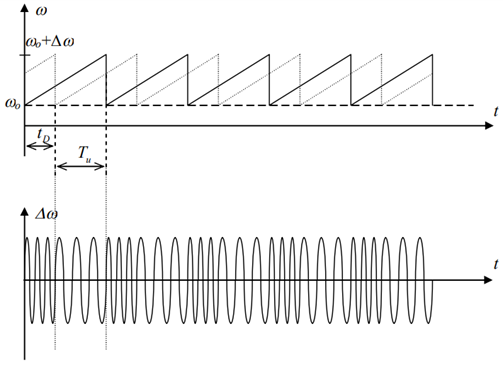
Частотный метод измерения дальности основан на использовании частотной модуляции излучаемых непрерывных сигналов.
В данном методе за период излучается частота, меняющаяся по линейному закону от ω0 до ω0 + ∆ωи . Т.е. за один период зависимость частоты излучаемого сигнала от времени:
В то время как отраженный сигнал придет промодулированным линейно в момент времени, предшествующий настоящему на время задержки tD. Частота отраженного сигнала, принятого на РЛС, будет зависеть от времени следующим образом: 
Вычитая из первого уравнения второе, получим выражение для разностной частоты ∆ω:
Выражая отсюда tD и подставляя в  , найдем зависимость дальности от разностной частоты:
, найдем зависимость дальности от разностной частоты:
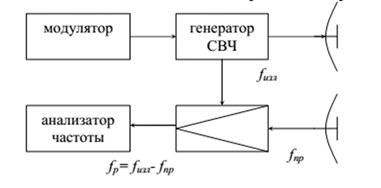
Структурная схема частотного дальномера будет выглядеть следующим образом
Модулятор формирует модуляцию частоты, вырабатываемой генератором СВЧ. После чего сигнал поступает на передающую антенну. Так как сигнал непрерывный, то требуется еще и отдельная принимающая антенна. На приемник поступают прямой и отраженный сигналы, из которых на смесителе выделяется их разностная частота, значение которой после фильтровки передается на систему индикации.
Достоинства частотного метода измерения дальности:
позволяет измерять очень малые дальности;
используется маломощный передатчик;
Недостатки:
необходимо использование двух антенн;
ухудшение чувствительности приемника вследствие просачивания в приемный тракт через антенну излучения передатчика, подверженного случайным изменениям;
высокие требования к линейности изменения частоты
Фазовый метод
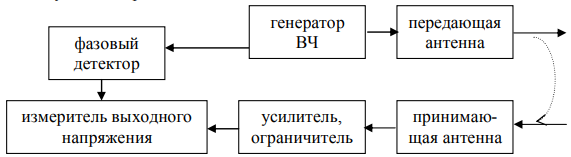
Фазовый метод измерения дальности основан на измерении разности фаз излученных и принятых радиосигналов. Структурная схема простейшего фазового измерителя дальности выглядит следующим образом:
Генератор ВЧ создает колебания, которые через передающую антенну излучаются во внешнее пространство с соответствующей фазой:

где φ1 - начальное значение фазы.
На приемную антенну поступает отраженный сигнал со значением фазы: 
где φотр - фазовый сдвиг при отражении, φРЛС- фазовый сдвиг в цепях РЛС, - эта величина постоянна и ее можно подсчитать экспериментально.
Принятый сигнал усиливается и его фаза вместе с фазой первоначального сигнала, детектируемой на фазовом детекторе, поступает на измеритель выходного напряжения.
Т.е. на измеритель выходного напряжения придет сигнал с разностной фазой, полученной при вычитании первого уравнения из второго:

Учтем, что  . Тогда согласно выражению
. Тогда согласно выражению  предыдущее уравнение запишется в виде:
предыдущее уравнение запишется в виде:

Большой недостаток в том, что здесь неизвестен фазовый сдвиг отраженного сигнала, который может меняться как угодно, причем существенным способом.
Поскольку ∆φ< 2p π , то из предыдущего уравнения следует однозначный диапазон измерения дальности:
Т.к. используются ультракороткие волны, то однозначный диапазон измерения дальности порядка единиц метра. Поэтому на практике используют более сложные схемы, в которых присутствует две и больше частот.
Достоинства фазового метода измерения дальности:
маломощное излучение, т.к. генерируются незатухающие колебания;
точность не зависит от доплеровского сдвига частоты отражения
достаточно простое устройство
Недостатки:
отсутствие разрешения по дальности
ухудшение чувствительности приемника вследствие просачивания в приемный тракт через антенну излучения передатчика, подверженного случайным изменениям.
16. Каковы разновидности и особенности амплитудных методов измерения угловых координат?
Амплитудные методы отличаются большей простотой технической реализации, чем фазовые, и это обусловило их преимущественное распространение. Измеряемыми параметрами выходных сигналов, несущими информацию об угле, являются амплитуды.
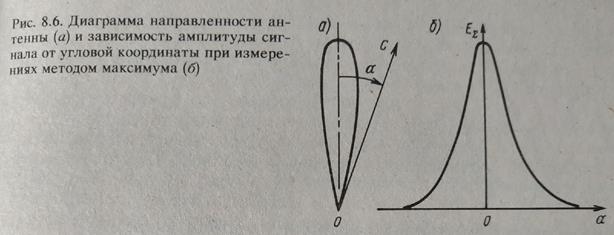
Метод максимума заключается в ориентации оси антенной системы в направлении на объект (например, ВС) по максимуму амплитуды сигнала, принимаемого от данного объекта. Для определения направления можно использовать любую антенну, ДН которой имеет отчетливо выраженный максимум (рис. 8.6), жестко связанный с ее конструктивными осями. Поворачивая антенну, добиваются появления максимума амплитуды сигнала и по ориентации конструктивной оси в точке максимума судят о направлении на источник излучения.
Недостаток амплитудного метода максимума — его сравнительно невысокая угловая чувствительность, что обусловлено тем, что амплитуда принимаемых сигналов вблизи максимума ДН при изменении – угла изменяется слабо, и поэтому при определении направления максимального приема возникают значительные погрешности.
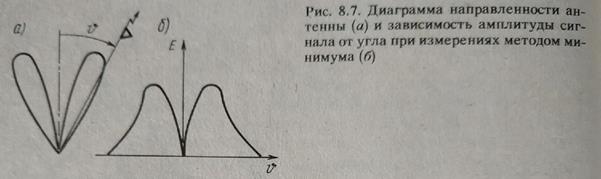
Более высокой угловой чувствительностью обладает метод минимума, сущность которого сводится к тому, что о положении фронта волны судят по минимуму амплитуды сигнала. При реализации метода минимума диаграмма направленности антенной системы имеет ярко выраженный минимум (провал), который совмещается с направлением на объект и производится оценка положения антенны относительно опорного направления по минимуму амплитуды принимаемого сигнала. (рис. 8.7).
Метод минимума обладает более высокой угловой чувствительностью, чем метод максимума, так как вблизи направления нулевого приема амплитуда результирующего сигнала резко изменяется при изменении угла.
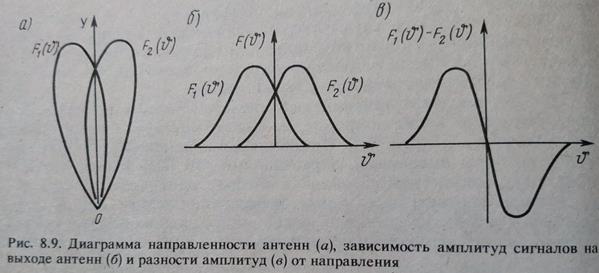
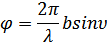
Кроме методов максимума и минимума, на практике находит применение равносигнальный метод. При определении направления равносигнальным методом используют две близкие по форме, но смещенные друг относительно друга по углу ДН (рис. 8.9). Принимая одновременно либо попеременно сигналы антеннами, образующими эти ДН, фиксируют направление, амплитуды сигналов в котором одинаковы. Этому направлению соответствует точка пересечения обеих ДН. Вместо сравнения амплитуд сигналов можно определять их разность. Равносигнальному направлению соответствует нуль разности амплитуд.
Знак разности амплитуд изменяется при прохождении ее через нуль. Эта особенность используется для определения стороны отклонения источника излучения относительно равносигнального направления. Она позволяет облегчить процесс пеленгования и автоматизировать его. Методы минимума и максимума лишены этой особенности, что является их недостатком.
17. Почему фазовый метод измерения угловых координат не обладает разрешающей способностью по направлению?
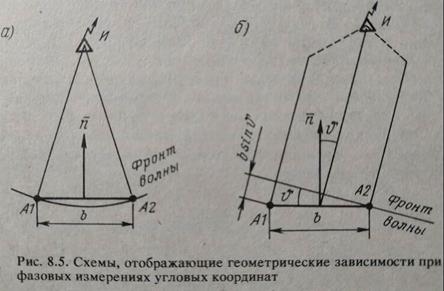
Фазовые методы угловых измерений основаны на определении пространственного положения фронта волны путем измерения разности фаз колебаний, возбуждаемых радиоволной в приемных антеннах, устанавливаемых в двух разнесенных точках пространства. В частности, разность фаз колебаний в точках, расположенных на поверхности фронта, равна нулю. Поэтому если найти точки, для которых разность фаз колебаний равна нулю, то нормаль к отрезку, соединяющему эти точки (рис. 8.5, а), будет направлена в точку расположения источника волны.
Таким образом, для определения направления необходимо располагать двумя ненаправленными антеннами, разнесенными на некоторое расстояние b друг от друга (это расстояние называется базой). Сигналы, возбуждаемые в антеннах, после усиления подводятся к фазометру, обеспечивающему измерение разности фаз между ними. Поворачивая базу антенн, выбирают такую ее ориентацию, при которой разность фаз становится равной нулю. Нормаль n к базе в этом случае будет направлена на источник волны.
О направлении на источник излучения можно судить, фиксируя не только нулевую, но и любую другую разность фаз. Каждому значению разности фаз соответствует определенное значение угла между базой и фронтом волны, а значит, и между нормалью к базе и направлением на источник. Таким образом, по измеренной разности фаз можно судить о направлении (рис. 8.5, б).
Разность расстояний до источника δr = bsinυ, а измеренная разность фаз
где υ – угол наклона фронта волны к базе.
Таким образом, по измеренной разности фаз φ можно определить угол υ между нормалью и направлением на источник.
Фазовый угломер с ненаправленными антеннами не обладает разрешающей способностью по углу, поскольку два или несколько источников сигнала, расположенных на различных направлениях, создадут в антеннах единый результирующий сигнал (если они неразделимы по другим параметрам), что исключает возможность их раздельного наблюдения и измерения пеленгов. Для разрешения сигналов по углу необходимы антенны с достаточно узкой амплитудной характеристикой направленности.
18. Приведите классификацию РЛС, применяемых в ГА; их особенности.
Современные РЛС характеризуются:
высокой оперативностью получения данных о координатах ВС и дополнительной полётной информации для УВД (идентификатор ВС, высота полёта, сигналы о чрезвычайных ситуациях на борту);
полнотой информации о состоянии воздушной обстановки в контролируемой зоне;
наглядностью представления информации о местоположении ВС и полётной информации;
высокой степенью автоматизации работы;
высокой точностью и надёжностью функционирования.
Поскольку требования к РЛС часто противоречивы и в одной системе удовлетворить их невозможно, то используются РЛС различных видов.
РЛС, используемые в гражданской авиации, можно классифицировать по нескольким признакам:
1. По месту установки: наземные, бортовые.
2. По принципам формирования радиосигналов и их взаимодействия с целью: активные РЛС с пассивным ответом (первичные), активные РЛС с активным ответом (вторичные), пассивные РЛС.
3. По видам обзора пространства: однолучевые (мгновенный обзор сразу в двух плоскостях, мгновенный обзор в одной и сканирование в другой плоскости, сканирование сразу в двух плоскостях узким лучом), многолучевые (мгновенный обзор сразу в двух плоскостях, мгновенный обзор в одной и сканирование в другой плоскости).
4. По числу измеряемых координат: двухкоординатные, трехкоординатные.
5. По эксплуатационному назначению: трассовые обзорные, аэродромные обзорные, посадочные, метеорологические, РЛС обзора лётного поля, вторичные и комбинированные РЛС.
Последний признак классификации следует рассмотреть подробнее. Классификация РЛС по эксплуатационному назначению представлена на рис. 1.1.
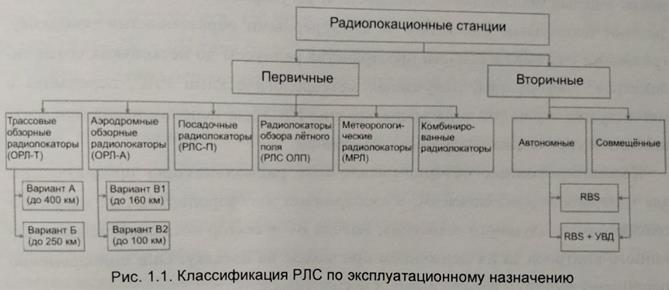
Трассовые обзорные РЛС предназначены для контроля воздушной обстановки и УВД во внеаэродромном пространстве и на трассах. ОРЛ-Т обеспечивают обнаружение ВС и измерение их полярных координат (азимут и дальность) во внеаэродромной зоне с последующим представлением информации о воздушной обстановке в центры (пункты) ОВД.
Аэродромные обзорные РЛС предназначены для контроля и УВД в районе аэродрома и ввода ВС в зону действия средств посадки. ОРЛ-А обеспечивают обнаружение ВС и измерение их полярных координат (азимут и дальность) с последующим представлением информации о воздушной обстановке в центры (пункты) ОВД. Информация от ОРЛ-А используется диспетчерами подхода, круга и посадки.
Посадочные РЛС являются основной частью радиолокационных систем посадки. РЛС-П предназначены для контроля за положением ВС относительно заданных линий курса и глиссады снижения, а также за удалением ВС от точки приземления с целью передачи диспетчером посадки управляющих команд пилоту ВС, заходящего на посадку. При выборе иных систем посадки РЛС-П могут использоваться только для контроля и документирования процесса посадки ВС.
РЛС обзора лётного поля предназначены для обнаружения и наблюдения за ВС, спецавтотранспортом, техническими средствами и другими объектами, находящимися на ВПП, РД и перроне, а также для контроля и управления движением ВС по ВПП и РД во время руления, старта и после приземления.
Метеорологические РЛС служат для анализа метеорологической обстановки с целью повышения безопасности и регулярности полётов ВС. МРЛ позволяют непрерывно наблюдать за атмосферными образованиями (например, грозовыми очагами) в области пространства радиусом до нескольких сотен километров. Информация, полученная метеорологическими РЛС, передаётся в метеослужбу аэропорта и на диспетчерские ИВО для использования при организации и управлении воздушным движением.
Комбинированные обзорно-посадочные радиолокаторы предназначены для контроля за движением ВС в аэродромной зоне аэропортов при малой интенсивности воздушного движения, вывода ВС в сектор посадки и непосредственного контроля за их движением при заходе на посадку. Они одновременно выполняют функции аэродромных и посадочных РЛС.
Вторичные РЛС предназначены для обнаружения, измерения полярных координат (азимут и дальность), запроса и приёма дополнительной полётной информации от ВС, оборудованных самолётными радиоответчиками (СРО), с последующим представлением координатной и полётной информации в центры (пункты) ОВД.
19. Представьте типовую структурную схему обзорной РЛС; поясните работу РЛС на передачу и на приём

Обобщенная функциональная схема первичной обзорной РЛС приведена на рис. 1.2, временные диаграммы, поясняющие принцип функционирования РЛС, - на рис. 1.3
Работа РЛС на передачу. В блоке синхронизации (С) вырабатываются короткие импульсы с крутым передним фронтом и периодом повторения (Тп), величина которого определяется условием однозначного измерения дальности:
где Rmax - максимальная дальность действия РЛС.
В этом случае эхо-сигналы, отражённые от самых удалённых объектов, успевают возвратиться до излучения очередного зондирующего импульса.
Из блока синхронизации импульсы запуска поступают в модулятор (МОД), первый каскад которого (подмодулятор) выполнен по схеме ждущего генератора импульсов. Длительность прямоугольных импульсов подмодулятора определяет длительность зондирующих высокочастотных импульсов РЛС (τи). Эта длительность обычно мала и составляет около 0,5-3 мкс.
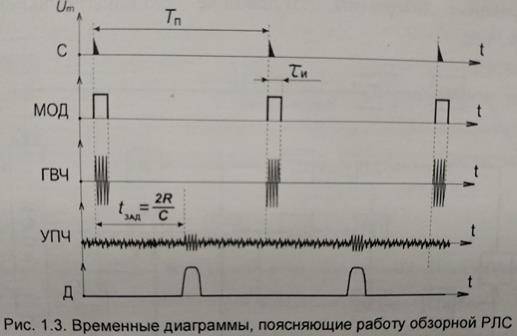
Импульсы подмодулятора подаются в собственно модулятор, который представляет собой мощный электронный ключ. Через него энергия от высоковольтного накопителя поступает на генератор высокой частоты (ГВЧ), вырабатывающий мощные СВЧ-колебания.
Часть энергии зондирующего СВЧ-импульса ответвляется через аттенюатор (ATT) или ослабитель для автоматической подстройки частоты (АПЧ) гетеродина (ГЕТ) радиоприёмного устройства.
В РЛС ГА используются зеркальные параболические антенны с облучателем. расположенным на фокальной оси отражателя. Антенна обеспечивает круговой (либо секторный) обзор пространства с помощью механизма вращения (МВ), к которому подсоединён датчик углового положения антенны (ДУПА), обеспечивающий преобразование угла поворота вращающейся антенны в электрические сигналы, позволяющие определить угол её поворота.
Работа РЛС на приём. Принятые антенной эхо-сигналы направляются антенным переключателем (АП) в приёмник (ПРМ). Приёмник РЛС предназначен для частотной фильтрации полезного эхо-сигнала, принимаемого антенной, его усиления и преобразования к виду, пригодному для работы в аппаратуре первичной обработки радиолокационной информации. Радиолокационные приёмники выполнены по супергетеродинной схеме и имеют достаточно ШИРС полосу пропускания (2-3 МГц), что обусловлено широким спектром импульсных сигналов, большими уходами частоты ГВЧ, неточностью настройки элементов схемы и влиянием дестабилизирующих факторов. Для обеспечения обнаружения приёмник должен иметь высокую чувствительность, поэтому первым блоком приёмника является усилитель высокой частоты. Его назначение - первичное усиление принятых сигналов в 5-15 раз. Так как чувствительность приёмника ограничивается мощностью шумовых напряжений, возникающих в его входных цепях, то усилитель должен иметь малый уровень собственных тепловых шумов.
В приёмниках РЛС малой и средней дальности действия усилитель высокой частоты часто отсутствует. В них входным элементом является смеситель (СМ1) преобразователя частоты, в котором принятый на частоте fС сигнал преобразуется в сигнал промежуточной частоты fПР. СМ1 выполняется на кристаллическом диоде, помещённом в объёмный резонатор. На диод подаются сигналы от антенны с частотой fС и от гетеродина ГЕТ с частотой fГ. Гетеродином является отражательный клистрон - маломощный генератор СВЧ-колебаний. Колебания промежуточной частоты fПР образуются на выходе СМ1 как результат биений (интерференции) колебаний двух близких частот, отличающихся на величину fПР. Далее эхо-сигналы на частоте fПР. усиливаются в многокаскадном усилителе промежуточной частоты (УПЧ). Он производит оптимальную фильтрацию полезных сигналов, поскольку его частотная характеристика согласована со спектром эхо-сигналов. При этом на выходе УПЧ соотношение сигнал/шум максимально. Радиоимпульсы промежуточной частоты преобразуются в амплитудном детекторе (Д) в видеоимпульсы, повторяющие по своей форме огибающую радиоимпульсов.
Устройство автоматической подстройки частоты (АПЧ) вырабатывает напряжение, управляющее частотой гетеродина ГЕТ (иногда частотой ГВЧ) для поддержания равенства разностной (промежуточной) частоты fПР номинальному значению. Для обеспечения работы АПЧ ослабленный в ATT зондирующий сигнал смешивается в смесителе СМ2 с непрерывным колебанием гетеродина ГЕТ аналогично принимаемому эхо-сигналу. Частота образующихся на выходе СМ2 радиоимпульсов сравнивается в частотном дискриминаторе устройства АПЧ с номинальным значением fПР. При наличии частотного рассогласования, вызываемого дестабилизирующими факторами (например, изменением температуры), в устройстве АПЧ вырабатывается напряжение, управляющее частотой ГЕТ (либо генератора ГВЧ). Возможное частотное рассогласование устраняется. При этом усиление УПЧ, а значит, и чувствительность приёмника будут максимальными. Поскольку эхо-сигналы изменяются по амплитуде случайно, в зависимости от дальности цели, влияния атмосферы и флуктуаций отражающих свойств радиолокационных целей, коэффициент усиления УПЧ, соответственно, изменяется различными схемами автоматической регулировки усиления (на схеме не показаны). Блок селекции движущихся целей (СДЦ) предназначен для выделения эхо-сигналов от движущихся целей (ВС) путём подавления помех - эхо-сигналов от неподвижных объектов (облаков или рельефа местности). Работа блока позволяет с помощью анализатора помех (АнП) обеспечивать уменьшение влияния пассивных помех на определение значений дальности и азимута целей.
20. Каковы содержание и этапы цифровой обработки радиолокационной информации?
Вся обработка радиолокационной информации подразделяется на три этапа.
Первичная обработка заключается в обнаружении сигнала цели и измерении ее координат с соответствующими качеством или погрешностями. В состав первичной обработки РЛИ включают:
обнаружение полезного сигнала в шумах;
определение координат цели;
кодирование координат цели;
присвоение номеров целям.
Первичная обработка не дает исчерпывающей информации о целях, находящихся в зоне обзора РЛС.
Вторичная обработка - автоматическая или полуавтоматическая обработка информации, полученной за несколько периодов обзора РЛС с целью обнаружения и непрерывного сопровождения траекторий целей.
Она включает в себя следующие операции:
определение параметров движения целей (курс, скорость, ускорение и т. д.) по данным, полученным за несколько обзоров РЛС;
выделение области пространства, в которой с некоторой вероятностью ожидается появление отметки в следующем обзоре (экстраполяция отметок);
сличение экстраполированных координат с вновь полученными и привязка новой отметки к траектории цели (продолжение траектории).
При третичной обработке объединяются параметры траекторий целей, полученных от нескольких РЛС или первичных постов обработки РЛИ, и создается общая картина воздушной обстановки.
Главной задачей третичной обработки является решение вопроса, сколько целей находится в действительности в зоне ответственности. Для решения этой задачи необходимо выполнить следующие операции:
произвести сбор донесений от источников;
привести отметки к единой системе координат и единому времени отсчета;
установить принадлежность отметок к целям, т.е. решить задачу отождествления отметок;
выполнить укрупнение информации.
21. Поясните назначение, состав и принципы функционирования АПОИ
Аппаратура первичной обработки радиолокационной информации (АПОИ) предназначена для цифровой обработки информации первичных и вторичных радиолокаторов с целью передачи информации в цифровой форме по узкополосным линиям связи на большие расстояния, ввода в аппаратуру отображения (АО), либо в вычислительный комплекс средств автоматизации УВД для последующей вторичной и третичной цифровой обработки и отображения на индикаторе воздушной обстановки (ИВО).
Состав и принципы функционирования рассмотрим на примере АПОИ «Вуокса».
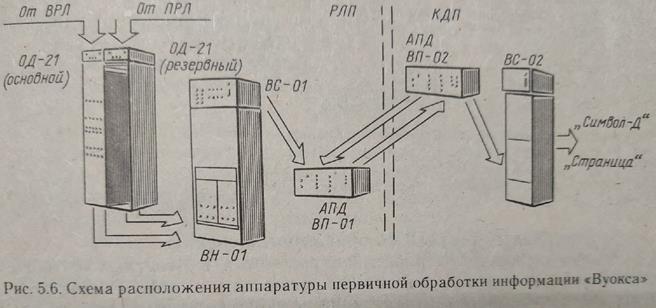
АПОИ «Вуокса» (рис. 5.6). Комплектация АПОИ «Вуокса» следующая. Совместно с РЛС располагаются: стойка сопряжения ВН-01, стойка обработки информации ОД-21 и передающая часть аппаратуры передачи данных ВП-01. Приемная аппаратура ВП-02 и стойка сопряжения ВС-02 расположены на КДП. Возможен вариант размещения всей аппаратуры на КДП. Стойка ОД-21 (АПОИ) предназначена для первичной обработки радиолокационной информации от ПРЛС и ВРЛ и подготовке ее для передачи после обработки в виде двоичных кодов на КДП.
Стойка сопряжения ВН-01 обеспечивает коммутацию входных и выходных сигналов АПОИ и АПД, управление АПОИ, преобразование запросных кодов в соответствующие напряжения, преобразование сигналов углового положения антенны.
Структурная схема АПОИ приведена на рис. 5.7.
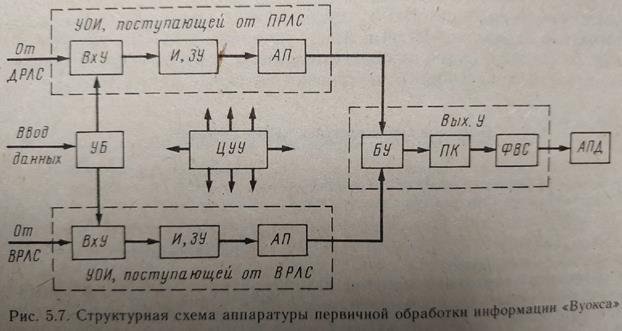
Задача первичной обработки отраженных и ответных сигналов первичного и вторичного каналов решается в двух устройствах обработки информации (УОИ). Оба устройства имеют почти одинаковую структуру и предназначены для обнаружения сигналов целей и измерения их координат. Второе используется также и для выделения полетной информации и формирования общего выходного сигнала по каждой цели. УОИ от первичных каналов РЛС состоит из входного устройства ВхУ, интегратора И с запоминающим устройством ЗУ и анализатора пакетов (АП). Во втором устройстве при обработке координатной информации используются те же методы обработки, а структура его аналогична устройству обработки информации ПРК и отличается лишь наличием дешифратора координатных кодов и полетной информации.
Общими устройствами, обслуживающими оба канала обработки, являются устройство бланкирования УБ и центральное устройство управления ЦУУ.
Устройство бланкирования (УБ) предназначено для запрещения обработки радиолокационной информации, поступающей от целей из некоторых зон, например, из зон для групповых полетов, не находящихся под управлением диспетчера, и зон, откуда могут приходить интенсивные отражения от местных предметов. Сигналы запрета реализуются во входных устройствах и в дешифраторе.
С обоих устройств обработки информация поступает на буферные устройства (БУ), задачей которого является сопряжение входной и выходной информации. Входная информация поступает на БФ и записывается в оперативное запоминающее устройство (ОЗУ) в темпе, определяемом расположением целей в воздушном пространстве. Выходная информация из ОЗУ в соответствии с требованиями АПД снимается регулярно с заданной скоростью.
Координаты целей средствами наблюдения измеряются в полярной системе координат, а выходные сообщения для обеспечения работы цифровой техники в системах обработки информации функционируют в прямоугольной системе координат, поэтому в выходном устройстве для перехода к этой системе имеется преобразователь координат (ПК). Информация с ПК поступает на формирователь выходных сообщений (ФВС), в котором она нормируется и располагается в необходимом для последующей обработки порядке.
22. Каково назначение, структура, особенности функционирования и размещения трассовых радиолокаторов (ОРЛ-Т)?
Трассовые обзорные РЛС предназначены для контроля воздушной обстановки и УВД во внеаэродромном пространстве и на трассах. ОРЛ-Т обеспечивают обнаружение ВС и измерение их полярных координат (азимут и дальность) во внеаэродромной зоне с последующим представлением информации о воздушной обстановке в центры (пункты) ОВД. Кроме того, они могут быть использованы для обнаружения и определения местоположения грозовых метеообразований при отсутствии метеолокаторов.