
7 характеристика направленности антенны








Гидроакустические показатели качества антенных решеток были рассчитаны, исходя из следующий параметров:
• Алгоритм формирования эквидистантного расположения элементов– метод решетки;
• Количество приемно-излучающих элементов N = 192;
• Диаметр антенны – 500 мм;
• Среднее расстояние между приемно-излучающими элементами 65 мм;
• Рабочая частота приема-излучения 
Амплитудная характеристика направленности элемента антенны 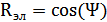 при
при  и
и  при
при  . Результаты ХН в режиме ненаправленного излучения представлена в проекции Хаммера на рисунке 7.1.
. Результаты ХН в режиме ненаправленного излучения представлена в проекции Хаммера на рисунке 7.1.
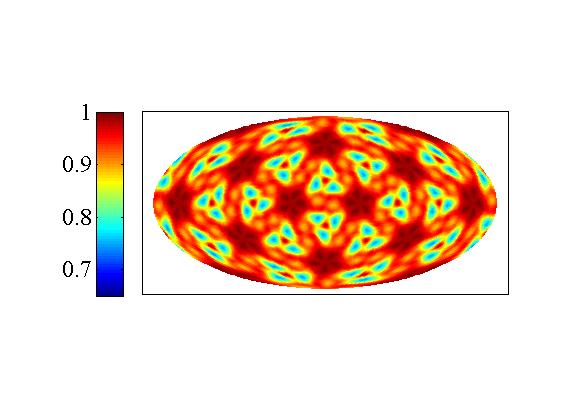
Рисунок 7.1 - Нормированная ХН в режиме ненаправленного излучения на частоте f0 в проекции Хаммера
В режиме приема шаг между характеристиками веера - 60 (всего 60 характеристик), что соответствует перекрытие главных лепестков ХН на уровне 0.7. Рабочая поверхность при формировании одной характеристики веера, представляет собой сферическое пятно с центральным углом 1200. Амплитудное распределение в пятне  . Для усреднения все характеристики веера приводились к единому направлению (осуществлялся их поворот в горизонтальной плоскости до совпадения осей главных лепестков) [10]. Результаты нормированной ХН в режиме приема представлены в проекции Хаммера и изображены на рисунке 7.2.
. Для усреднения все характеристики веера приводились к единому направлению (осуществлялся их поворот в горизонтальной плоскости до совпадения осей главных лепестков) [10]. Результаты нормированной ХН в режиме приема представлены в проекции Хаммера и изображены на рисунке 7.2.
Рисунок 7.2 - Средняя нормированная ХН по ансамблю характеристик веера в режиме приема на частоте f0
Одним из ключевых положительных моментов в выбранном методе формировании антенной решетки является то, что в режиме ненаправленного излучения он обеспечивает максимальную в среднем по поверхности мощность излучения по сравнению с другими известными методами.
7.1. Допустимая скорость судна
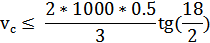
Основным моментом при выборе ширины ХН в угломестной плоскости является возможность обеспечить регистрацию сигналов от отдельных рыб на максимальных скоростях поиска. Обычно для обнаружения отдельных рыб хватает три-пять эхосигналов, если взять три, то ширина ХН в угломестной плоскости может быть рассчитана по формуле (20) [1]:
| (20) |
 – скорость судна в узлах;
– скорость судна в узлах;
h – глубина регистрации рыб, 1000 м;
fи – частота следования импульсов посылки.
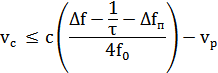
Максимально допустимая скорость судна будет лежать в диапазоне:
Так как известна ширина ХН в угломестной плоскости в режиме приема  можем определить интервал:
можем определить интервал:
 .
.
8 ХАРАКТЕРИСТИКА ПЕЛЕНГУЕМОЙ ЦЕЛИ
8.1. Отражающая способность пеленгуемого объекта
Отражающую способность объектов пеленгования выражает коэффициент  , равный отношению интенсивности отраженной и падающей волн.
, равный отношению интенсивности отраженной и падающей волн.
Эта величина имеет больше значение в решении задач обнаружить рыбу. Это происходит по следующей причине. Рыбные особи обладают плавательным пузырем, который дает им возможность удерживаться на определенной глубине без надобности непрерывной работы плавниками и хвостом. Известно, что тело рыбы преимущественно состоит из воды, и плавательный пузырь как орган, наполненный воздухом, отражает практический весь зондирующий импульс в обратном направлении за счёт значительной разницы скорости звука в воде и воздухе, и тем самым рыбная особь даёт возможность себя обнаружить. Поэтому основным фактором определения обратного рассеяния от рыбы является ее воздушный пузырь.
В таблице 1 [1] приведены значения коэффициента отражения для некоторых отражающих объектов.
Таблица 1 – Значения коэффициента отражения для некоторых объектов в %
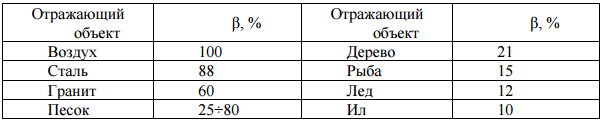
Из таблицы видно, что коэффициент отражения для воздуха в значительной степени превосходит данный коэффициент по отношению к телу рыбы. Это удобно использовать применительно для приемно-усилительного тракта.
Ввиду того, что конфигурации и физические свойства объектов пеленгования разнообразны, порой бывает невозможно определить уровень интенсивности эхосигналов от реального объекта. Поэтому цели пеленгования принято замещать их эквивалентными целями по отражательной способности – эквивалентными радиусами сферы  .
.
Характеристики объектов промысла в придонном слое и пелагиали приведены в таблицах 9.1 и 9.2 соответственно в работе [1]. Данные были сформированы экспериментальным путем на частоте 30 кГц. Эти значения используются при проектировании ГАС, работающей на частоте, которая отличается от значения частоты, на которой производился эксперимент по калибровке искусственной цели. Эквивалентный радиус определяют из выражения (21):
 , ,
| (21) |
 – частота, на которой был определен эквивалентный радиус
– частота, на которой был определен эквивалентный радиус  ;
;
 - рабочая частота проектируемой аппаратуры, 27 кГц.
- рабочая частота проектируемой аппаратуры, 27 кГц.
Так эквивалентный радиус на рабочей частоте нашей проектируемой станции в 27 кГц в пелагиали для одиночной рыбной особи средних размеров по данным таблицы 9.1 [1] будет равен:
Для рыбного косяка из 1000 особей:
Радиус эквивалентной сферы на рабочей частоте в придонном слое для одиночной особи средних размеров по данным таблицы 9.2 [1]:
8.2. Эффект Доплера
Главной отличительной особенностью одиночной рыбной особи или косяка является хаотичное движение в водной среде. Это проявляется как и в неравномерности направления движения, так и в непостоянстве скорости перемещения в водном пространстве.
Эффект Доплера проявляется в изменении частоты приема по сравнению с излучаемой при движении носителя аппаратуры и объекта пеленгования.
Анализ данного эффекта по отношению к пеленгующему устройству и цели пеленгования можно провести на основе формулы (22) [1]:
 , ,
| (22) |
 - принятая частота;
- принятая частота;
- излученная (рабочая) частота;
 - скорости излучателя и отражающего объекта соответсвенно;
- скорости излучателя и отражающего объекта соответсвенно;
 - скорость сближения (расхождения) источника излучения и отражающего объекта.
- скорость сближения (расхождения) источника излучения и отражающего объекта.
Анализируя формулу (22) можно сделать вывод, что при сближении излучателя и объекта, то есть при  , частота увеличивается и тон звучания принимаемого эхосигнала повышается. Если же цель удаляется, то есть
, частота увеличивается и тон звучания принимаемого эхосигнала повышается. Если же цель удаляется, то есть  , то уменьшается и тон звучания принятого сигнала понижается.
, то уменьшается и тон звучания принятого сигнала понижается.
Принятый сигнал, ввиду неравномерности скорости перемещения пеленгуемого рыбного косяка, будет иметь доплеровское смещение по частоте относительно частоты, излученного сигнала. Смещение частоты  будет пропорционально скорости
будет пропорционально скорости  перемещения пеленгуемой рыбы. Пример распределения амплитуды сигнала по частоте изображен на рисунке 8.1.
перемещения пеленгуемой рыбы. Пример распределения амплитуды сигнала по частоте изображен на рисунке 8.1.
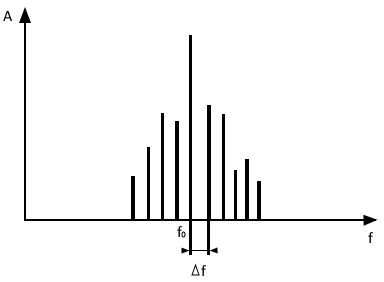
Рисунок 8.1 - Распределение амплитуды сигнала по частоте ( – частота, излученного сигнала; – смещение частоты по Доплеру принятого сигнала)
Таким образом, особенность рыбы – непостоянство и неравномерность скорости, отличающее её от других движущихся объектов акватории, которые в свою очередь перемещаются более менее равномерно, будет один из ключевых моментов в формировании приемно-усилительного тракта. Включим в него блок определения скорости пеленгуемой цели на основе смещения частоты по Доплеру, который будет пропускать сигнал только от хаотично перемещающихся объектов с неравномерной скоростью.
Поскольку эффект Доплера производит непосредственное влияние на изменение принимаемого сигнала, будем его учитывать в расчете полосы пропускания приемно-усилительного тракта. ПП с учетом данного эффекта позволяет рассчитать формула (23) [3]:
 , ,
| (23) |
 – полоса частот, необходимая для перекрытия эффекта Доплера;
– полоса частот, необходимая для перекрытия эффекта Доплера;
 – полоса частот, необходимая для прохождения импульса длительностью
– полоса частот, необходимая для прохождения импульса длительностью  ;
;
 - полоса, необходимая для компенсации нестабильности частоты передающего тракта, 100 кГц;
- полоса, необходимая для компенсации нестабильности частоты передающего тракта, 100 кГц;
- рабочая частота, 27 кГц.
Используя максимальную скорость движения рыбы из таблицы 9.1 работы [1]  и ранее рассчитанную максимально допустимую скорость судна рассчитаем ПП приемно-усилительного тракта по формуле (23):
и ранее рассчитанную максимально допустимую скорость судна рассчитаем ПП приемно-усилительного тракта по формуле (23):

Полученное значение ПП не удовлетворяет ПП приемно-излучающего элемента антенны равной 2 кГц, следовательно наложим ограничение по максимальной скорости судна.
Допустимая скорость судна:


8.3. Система «Белая линия»
Для повышения эффективности поиска объектов промысла необходимо задействовать систему отделения эхосигналов, пришедших от придонной рыбы, от сигналов, пришедших от дна. Решить данную задачу можно посредством введения в схему приемно-усилительного тракта устройства, работающего по системе «Белая линия».
Данная система очень популярна и ей оснащаются многие устройства рыбопоисковой эхолокации.
Усилитель системы будет срабатывать только от сигналов с амплитудой большей, чем заданная. Если порог срабатывания будет установлен выше самого сильного сигнала от рыбы, но ниже эхосигнала от дна, усилитель автоматически отключится примерно на 0.01 секунду после приема донного сигнала. В результате на эхограмме на устройстве отображения будет белый интервал, примыкающий к записи донного сигнала, белые интервалы будут образовывать так называемую «белую линию», которая воспроизведет контуры морского дна со следами эха от рыбы. Эти следы будут различимы над очертаниями дна.
Таким образом, данная система позволит увидеть тень от рыбы и тем самым обнаружить цель на фоне дна.
8.4. Пространственная фильтрация
Прием эхосигналов антенным устройством сопровождается различного рода помехами. Наибольшее влияние на работу ГАС оказывают реверберационные шумы. Такие помехи по своей физической природе являются результатом суперпозиции многочисленных рассеяний зондирующего сигнала, одновременно достигших антенны. Но чем от более далеких рассеивателей приходит реверберация, тем меньше будет ее уровень из-за затухания в морской среде.
Реверберационные шумы носят флуктуирующий характер в силу интерференции между собой многократно отраженных от центра рассеяния эхоимпульсов. Реверберации характерно быстрое уменьшение интенсивности пропорционально квадрату времени [1]. Данная зависимость приведена на рисунке 8.2.
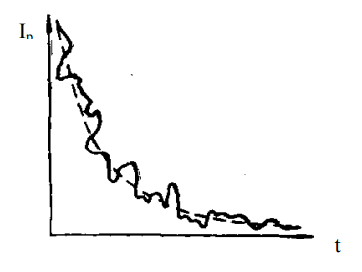
Рисунок 8.2 - График изменения интенсивности реверберации во времени
Для того, чтобы понизить вероятность ошибки в определении нужной цели, появляется потребность в понижении уровня помех.
Так как в нашем случае полезный сигнал является периодической функцией, характеристики периодов и длительности были рассчитаны ранее, для фильтрации принятого сигнала можем применить метод накопления. Данный метод линейной фильтрации состоит в многократном повторении сигнала и суммировании отдельных его реализаций в устройстве обработки.
Метод относится к группе точечных алгоритмов обработки сигналов.
Пусть полезный сигнал представлен двумя уровнями, (Рисунок 8.3).
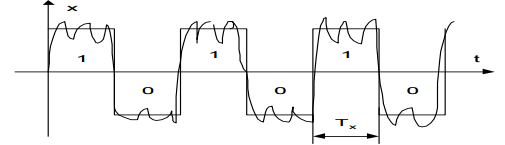
Рисунок 8.3 - Входной двухуровневый сигнал
В интервале  сигнал постоянен. На этом же интервале накапливается выборка значений принятого сигнала:
сигнал постоянен. На этом же интервале накапливается выборка значений принятого сигнала:


……………

Эти значения суммируются:
Если ввести допущения, что отсчеты помехи  не зависят друг от друга и помеха стационарна (ее характеристики не зависят от времени), то можем определить
не зависят друг от друга и помеха стационарна (ее характеристики не зависят от времени), то можем определить  на выходе этого накопителя по уравнению (24) [12]:
на выходе этого накопителя по уравнению (24) [12]:

| (24) |
В результате использования n – кратного отсчета, при перечисленных выше условиях, отношение сигнал-помеха увеличивается в n раз. Таким образом полезный сигнал накапливается (увеличивается), а помеха усредняется.
Данный метод относится к группе цифровой обработки и будет исполнен посредством введения электронного контроллера в проектируемую станцию.
9 УСТРОЙСТВО ГАС
Спроектированное сферическое антенное устройство нашей станции работает в импульсном активно-пассивном режиме. Длительность зондирующего импульса и время в режиме приема рассчитаны ранее. Сферическая конструкция нашего антенного устройства дает возможность обеспечить одновременный круговой обзор акватории в пределах 3600 вокруг несущего судна. Обзор вертикального обзора лежит в сектора 1200. Такой способ позволяет получить наименьшее время обзора.
Реализация такого метода требует определения тракта излучения и приема.
В режиме излучения наше антенное устройство будет работать ненаправлено в горизонтальной плоскости и направленно в секторе 1200 в вертикальной плоскости.
Такой способ облучения обеспечит нам минимальную мертвую зону.
В режиме приема для обеспечения быстрого просмотра окружающей акватории наша АС будет использовать быстрое внутриимпульсное сканирование последовательно по одной приемной ДН шириной 180, со скоростью, обеспечивающей полный оборот за время  (
(  - минимально возможная длительность эхосигнала с любого направления).Вращение ДН будет осуществляться с помощью электронного коммутатора с частотой сканирования
- минимально возможная длительность эхосигнала с любого направления).Вращение ДН будет осуществляться с помощью электронного коммутатора с частотой сканирования  .
.
9.1. Устройство первичной обработки
Антенное устройство проектируемой ГАС работает в многоканальном режиме. Таким образом требуется модуль первичной обработки принятых сигналов с достаточной производительностью. Выберем модуль ADP201cP5, который разработан на базе процессора TigerSHARC ADSP-TS201S фирмы Analog Devices. Данный выбор обусловлен достаточном для нашей ГАС производительностью данного контроллера, которая составляет 15 Gflops.
К основным плюсам цифровой обработки перед аналоговой можно отнести:
• Стабильность параметров обработки;
• Возможность адаптации у условиям приема и характеру сигнала автоматически;
• Сокращенное время настройки;
• Схемотехническое упрощение, сниженная масса, повышенная надежность.
Данный контроллер является четырех канальным устройством: основной канал суммарного сигнала и три дополнительных. В функциональном плане все каналы идентичны, но в отличие от суммарного дополнительные каналы имеют один подканал дальности, что требует выполнение Фурье-анализа только для одного канала дальности [13].
К основным характеристикам можно отнести:
• Тактовая частота локальной шины 100 Мг;
• Динамическая память SDRAM пять банков по 128 Мб;
• Интерфейс связи с компьютером через CompactPCI 64бит.
Структурная схема предварительной обработки приведена на рисунке 9.1.
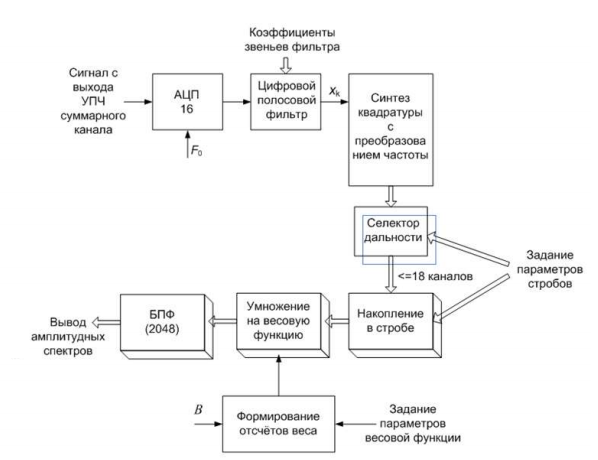
Рисунок 9.1 - Схема структуры предварительной обработки
Внешний вид модуля приведен на рисунке 9.2.
Рисунок 9.2 - Внешний вид котроллера ADP201cP5
9.2. Устройство вторичной обработки
Данный модуль необходим для обработки данных на выходе после первичной обработки и последующего вывода информации на устройство отображения. Критерии выбора устройства вторичной обработки ввиду работы на судне в составе станции можно сформировать следующим образом:
• Достаточная прочность корпуса;
• Высокая производительность вычислительного процессора.
Исходя из критериев был промышленный компьютер M-Max 800-TRN-02, созданный на базе свежей линейки высокопроизводительных процессоров Core-i7 2.8 ГГц и обладающий герметичным ударопрочным алюминиевым корпусом. Система успешно работает в диапазоне температур от -40 С0 до +65С0. Внешний вид данного ЭВМ приведен на рисунке 9.3.

Рисунок 9.3 - Внешний вид M-Max 800-TRN-02
9.3. Интерфейс отображения информации
Интерфейс должен обеспечить круговое отображения обстановки акватории вокруг судна в диапазоне 3600. Соответствующая развертка на приборе индикации будет такого же диапазона. За счет плавательного пузыря рыбы, наполненного воздухом, принятый эхосигнал, пришедший от цели в пелагиали будет более высокого уровня относительно сигналов, пришедших от других объектов. Так же система будет реагировать и воспроизводить на устройство отображения только те цели, которые обладают неравномерной скоростью, характерную для объекта промысла. На устройстве отображения информации найденная рыба или рыбный косяк будет обозначены соответствующей пиктограммой. Глубина положения пеленгуемого объекта будет определяться окрасом в соответствии со шкалой, информирующей по цветовой индикации. Пример отображения информации подводной акватории, совмещающий в себе все вышеперечисленные условия, изображен на рисунке 9.4.
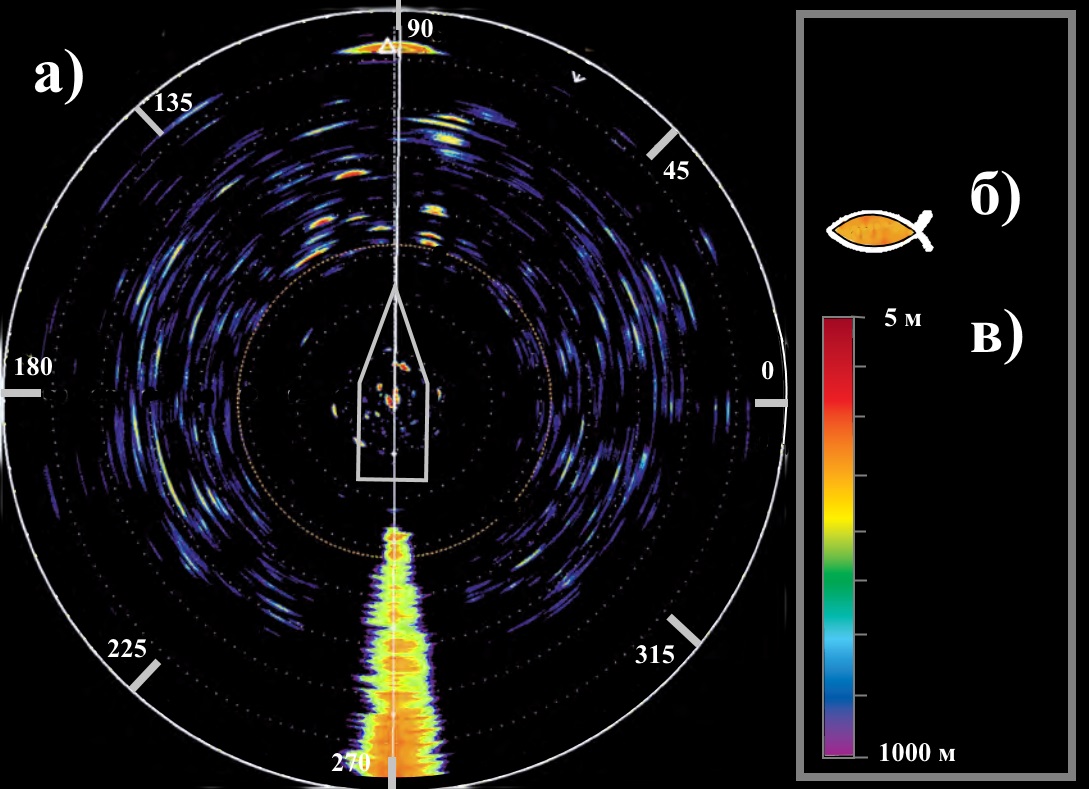
Рисунок 9.4 - Интерфейс отображения информации; развертка кругового отображения с разметкой углов (а); пиктограмма найденной одиночной рыбы или косяка (цвет окраса определяет глубину положения) (б); шкала глубины (максимальное значение – глубина дна, это значение меняется) (в)
9.4. Структурная схема ГАС
Структура спроектированной гидроакустической рыбопоисковой станции изображена на рисунке 9.5.

Рисунок 9.5 - Структура рыбопоисковой ГАС