
1 рыбопоисковая аппаратура








Рыбопоисковая аппаратура (РПА) является ключевой частью оборудования поисковых и промысловых судов отечественного и зарубежного флотов. Использование такой аппаратуры дало ряд преимуществ, начиная от значительного сокращения потери времени, направленного на поиск рыбы, и заканчивая почти полным исключением холостых тралений (процесс выявления препятствий на определенной глубине посредством трала).
Эффективность РПА напрямую зависит от её целевого назначения. Так, аппаратура узкоцелевого назначения, к примеру, для обнаружения пелагических рыбных скоплений малоэффективна при поиске придонной рыбы, а РПА, которая рассчитана на поиск придонной рыбы непосредственно под килем, неэффективна при локации такой рыбы в стороне от судна. Точно так же, рыбопоисковая аппаратура для выявления пелагических или придонных скоплений рыбы совершенно не подходит для работы по обнаружению донных скоплений и одиночных рыб, имеющих высокую отражающую способность [2].
Большинство приборов станции многоцелевого назначения (генераторы, усилители, индикаторы и др.) объединяют в единые конструкции с общими пультами управления и их можно использовать в различных по назначению трактах.
Наряду со станциями узкоцелевого и многоцелевого направления также находят применение гидроакустические РП комплексы. Они организовываются из отдельных станций целевого назначения и при необходимости могут быть скомпонованы из различных частей аппаратуры в зависимости от возникающих к судну требований. В качестве примера можно привести комплекс, состоящий из следующих звеньев: гидролокатор горизонтального действия, эхолот вертикального действия и аппаратуру по контролю орудий лова.
Гидроакустическая техника, которая применяется для рыбной промышленности, включает в себя [3]:
• аппаратуру поиска скопления рыбы (косяка) в районе лова, ее количественной оценки, определения координат и элементов движения, а также глубины нахождения, необходимых для эффективного использования орудий лова;
• аппаратуру контроля за положением орудий лова относительно косяка, их состоянием и рабочими параметрами;
• аппаратуру исследования поведения биологических объектов в среде обитания, приманки или отпугивания их, контроля за их миграцией, получения информации о физических процессах в организмах и т.д.
1.1. Пассивная и активная гидролокация
На сегодняшний день в целях поиска скоплений рыбы применяется два основных гидроакустических метода подводной локации – пассивный и активный [1].
Пассивная гидроакустическая локация – это способ, который даёт возможность установить наличие подводных объектов и зафиксировать их свойства. Способ основан на приеме и последующей обработке акустических сигналов, излучаемых самими подводными объектами. Структура данного способа представлена на рисунке 1.1.

Рисунок 1.1 - Схема работы пассивной ГАС
Работа пассивного гидроакустического локатора основана на следующем. Звуковые волны, которые излучает подводный объект, приходят на приемную антенну, где происходит преобразование принятого акустического сигнала в электрический , далее он усиливаются в усилителе и приходит на устройство отображения информации. По причине того, что рыбные объекты не являются источником довольно мощного гидроакустического поля, вариант пассивной гидроакустической локации как способ подводного наблюдения в целях поиска рыбных скоплений применяется достаточно редко и используется в основном в основном исследовательских) целях.
Активная гидролокация – метод установления свойств подводных объектов, базирующийся на излучении гидроакустических сигналов, последующих приеме и обработке эхосигналов, которые возникают в результате отражения (или рассеивания) от этих объектов. Схема пассивного гидролокатора представлена на рисунке 1.2.
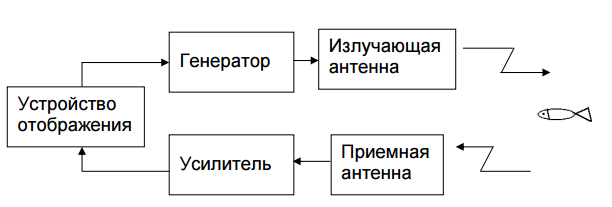
Рисунок 1.2 - Схема работы активной ГАС
Идея работы активного гидролокатора заключается в том , что акустические сигналы с генератора поступают на излучающую антенну, где преобразуются из электрической энергии в акустическую волну и излучаются в водную среду. По достижению подводных объектов, звуковые волны от них отражаются и далее поступают на приемную антенну, усиливаются в усилителе и приходят на устройство отображения информации.
1.2. Классификация систем активной гидролокации
Гидролокационные системы активного действия разделяются на гидролокаторы вертикального, горизонтального и горизонтально- вертикального действия.
Гидролокаторы горизонтального действия предполагают собой своеобразную разновидность судовых гидролокаторов. Более упрощенными по устройству, малогабаритными и недорогими считаются гидролокаторы шагового обзора, получившие обширное распространение. Впрочем в наше время все чаще в гидролокаторах используется секторный и круговой обзоры, обеспечивающие более действенный поиск рыбы и использование орудий лова.
Гидролокаторы горизонтально-вертикального действия начальный поиск рыбы производят в горизонтальной плоскости на удалении от судна. По мере сближения с найденным косяком производит наклон оси характеристики направленности (ХН) антенны в вертикальной плоскости, собственно что гарантирует слежение за рыбой на всех фазах лова. Высочайшая эффективность этих гидролокаторов достигается за счет немаловажного усложнения системы аппаратуры. В определенных гидролокаторах применяются независимые тракты горизонтального и вертикального обзора, работающие на разных частотах.
Гидролокаторы вертикального действия, являющие собой рыбопоисковые эхолоты, по принципу работы считаются разновидностью эхолотов, отличаясь от последних разными техническими параметрами и наличием добавочных узлов и приборов.
Рыбопоисковые эхолоты считаются ведущими способами для поиска объектов промысла радом с дном. В пелагиали (толща воды, не связанная с берегом и дном) эхолоты применяются для уточнения координат, выявленных гидролокаторами, рассредоточенных рыбных скоплений в вертикальной плоскости. Эхолоты, предназначенные для нахождения объектов промысла на глубинах выше 500 м, в большинстве случаев имеют антенное устройство, создающее 2 ХН: широкую – для локации объектов в пелагиали и узкую - в придонном слое. Эхолоты с дальностью воздействия не больше 300 м являются компактными и предусмотрены для оборудования малотоннажных судов. Эхолоты с дальностью до 100 м как правило переносные – с автономным питанием и применяются со шлюпок. Главным индикатором рыбопоисковых эхолотов считается электромеханический самописец, а при дальности воздействия больше 300 м используется индикатор электронный. Ведущее различие рыбопоисковых от всех других видов эхолотов – это присутствие приборов, содействующих увеличению производительности поиска.
1.3. Устройства повышения эффективности РПА
К приборам, повышающим эффективность нахождения рыбопоискового эхолота, относятся надлежащие системы:
Система «Белая линия». Она разрешает производить деление эхосигналов от рыбы и дна. Принцип её работы заключается в том, что усилитель системы включается лишь только от сигналов с амплитудой, более чем данная. В случае если порог срабатывания установлен выше самого сильного эхосигнала от рыбы, но ниже сигнала от дна, усилитель механически выключается приблизительно на 0,01 секунду впоследствии приёма донного эхосигнала. В следствие этого на эхограмме имеет место быть белый интервал, примыкающий именно к записи донного сигнала. На эхограмме белые интервалы образуют «белую линию», которая воспроизводит контуры морского дна со следами эха от рыбы, различимыми над очертаниями дна. У данной системы, введенной в схемы буквально всех рыбопоисковых эхолотов, имеется определенный дефект : в зависимости от отражательной возможности дна и глубины пространства важно неизменное ручное регулирование срабатывания схемы. Данный дефект имеет возможность быть устранён путём вступления схемы самодействующего порога срабатывания. Вертикальные движения судна при волнении моря вызывают пропуски в записи линии дна, запись эхосигналов от рыбы искажается и распознание их становится затруднительным. Подобный дефект отчасти устраняется вступлением в состав эхолота добавочной системы, называемая «Серая линия».
Система «Серая линия». В отличии от предшествующей предоставленная система не всецело запирает входные цепи приёмно-усилительного тракта, краткосрочно снижая степень переднего фронта эхосигнала от дна. При этом на ленте самописца появляется полоса – «Серая линия». Ширина её регулируется в зависимости от величины вертикального движения судна путём изменения продолжительности «запирания» усилителя. В критериях вертикальных смещений судна колебания кромки серой линии повторяющей очертания дна, почти не сказываются на качестве изображения. В данном случае эхограмма цели оказывается в облике более тёмной отметки над серой полосой.
Система «Контурная линия». В простых схемах запись грунта на ленте самописца выполняется в виде убывающих по интенсивности линий, начало коих определяет глубину пространства в момент прихода эхосигнала от дна. В ряде случаев лоцирование рыбы проводится в диапазоне глубин, при которых запись от дна занимает до тридцати процентов ширины картонной ленты, собственно что увеличивает затраты бумаги. Система "Контурная линия" способствует записи рельефа дна в облике тонкой линии, собственно что допускает повторное внедрение ленты самописца, а еще значимо понижает численность угольной пыли, загрязняющей узлы самописца при применении в нем электротермической бумаги.
Система «Динамический диапазон». При обыкновенной записи наращивание силы эхосигналов увеличивает степень потемнения бумага самописца вплоть до насыщения. При этом остается неосуществимой классификация скоплений рыбы по плотности. Система "Динамический диапазон" сокращает амплитуды эхосигналов, величины коих превосходят порог насыщения бумаги. Сильные эхосигналы впоследствии достижения конкретной величины регистрируются более светлыми отметками. Присутствие такового режима дает возможность оператору предопределять зону большей плотности косяка - его ядро, собственно что необходимо для увеличения производительности облова разреженных рыбных скоплений.
Система «Дно». При поиске придонной рыбы нередко используют электронное средство отметки (ЭО). Наибольшее распространение приобрели зрительные индикаторы с кадровой разверткой (с послесвечением и без него). На экране ЭО показываются быстропротекающие процессы. Изображение эхо- сигнала вследствие инерции зрения просматривается в форме всплесков разной толщины, амплитуды и конфигурации. Яркость изображения эхоимпульса находится в зависимости от его амплитуды. С наращиванием амплитуды эхосигнала на экране ЭО яркость изображения убывает, но маленькие по амплитуде эхосигналы изображаются на экране с большей яркостью. В следствие этого придонная рыба (при наименьшей амплитуде эхосигнала) отличается на фоне занимающего всю ширину экрана, не менее броского, изображения морского дна. Впрочем разведка рыбы с помощью ЭО связан с некоторыми неудобствами. Надобность постоянного наблюдения за экраном утомляет оператора. Для более удачного анализа эхосигналов придонной рыбы, изображаемых на экране ЭО, предпочтителен большой размах. Но с увеличением масштаба поискового диапазона прочность изображений грунта и придонной рыбы нарушается: при малозначительном изменении глубины (даже по причине волнения) изображение движется по экрану, затрудняя этим наблюдения. Для стабилизации изображения эхосигналов на экране ЭО и наращивания времени исследования за его показаниями и разработана система "Дно". Принцип ее воздействия заключается в следующем. Поступающие в приемный тракт эхосигналы от рыбы и грунта попадают в блок памяти и в этап между посылками 2-ух очередных зондирующих импульсов неоднократно воспроизводятся на экране ЭО в облике повторения 1-го и того же кадра. При этом генератор развертки ЭО для всякого дальнейшего кадра запускается эхоимпульсом от грунта предшествующего кадра. К моменту приема еще одних эхоимпульсов от рыбы и дна предыдущая запись стирается и фиксируется свежая, которая еще с большой частотой повторения воспроизводится на экране. Благодаря послесвечению любой эхосигнал просматривается на экране ЭО долгое время, собственно что позволяет разбирать его с большей точностью. Изображение на экране выходит размеренным - с привязкой эхосигнала от рыбы к отметке дна.
Система «ВАРУ» (временное автоматическое регулирование усиления). Создана для получения равных по величине эхосигналов от схожих по отражательной способности объектов промысла, оказавшихся на всевозможных расстояниях. Она дает возможность объективно расценивать показания регистрирующих устройств и брать на себя верное заключение по облову выявленных объектов промысла. Эффект достигается с помощью сокращения коэффициента усиления приемно-усилительного тракта во времени в согласовании с ослаблением распространяющейся акустической энергии по причине геометрического расширения фронта волны и поглощения [3].
1.4. Способы обзора гидроакустического локатора
В системах гидроакустической локации существует несколько способов обзора акватории вокруг промыслового судна, к ним относятся:
• Шаговый обзор;
• Cекторно-шаговый обзор;
• Одновременный круговой обзор.
Подробно описаны перечисленные методы в работе [4]: «Гидролокатор шагового обзора осуществляет обзор акватории дискретным (шаговым) перемещением одной относительно узкой диаграммы направленности (ДН) в горизонтальной плоскости при помощи электромеханического разворота акустической системы (АС) в заданном секторе. Часто гидролокаторы этого типа по аналогии с лучом прожектора называют прожекторными, или однолучевыми. Как правило, в гидролокаторах шагового обзора имеются режимы автоматического и ручного разворота (АС) в горизонтальной и вертикальной плоскостях обзора. Направление на цель определяется обычно методом максимального сигнала по ориентации (АС) в зону максимального уровня эхосигнала. Упрощенная структурная схема гидролокатора шагового обзора приведена на рисунке 1.3.
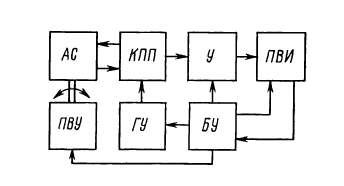
Рисунок 1.3 - Структурная схема ГА локатора шагового обзора
Акустическая система в традиционных гидролокаторах выполняет две разнородные функции: преобразование энергии электрической в акустическую или обратно и формирование направленного излучения или приема сигналов. Поворотно-выдвижное устройство (ПВУ) по сигналам от блока управления (БУ) разворачивает (АС) в горизонтальной и вертикальной плоскостях. Коммутатор приёма-передачи (КПП) выполняет функции переключения режимов излучения и приема. (ГУ) вырабатывает мощные электрические импульсы определенной формы и длительности для подачи их на (АС) в режиме излучения. Усилитель усиливает и обрабатывает принятые (АС) эхосигналы от цели для подачи их на (ПВИ), которые в конечном итоге представляют оператору полученные данные о цели в форме, удобной для их анализа и принятия решения. (БУ) синхронизирует и управляет всей работой гидролокатора.
Гидролокаторы шагового обзора имеют одну (ДН) и обеспечивают за один цикл излучение - прием обзор акватории в телесном угле, определяемом шириной (ДН). Основными недостатками таких гидролокаторов является малая скорость обзора, особенно при работе на больших дистанциях, и наличие значительных непросмотренных участков при движении поискового судна с повышенной скоростью, а также отсутствие возможности одновременного наблюдения за несколькими целями без применения специальных средств обработки сигналов.
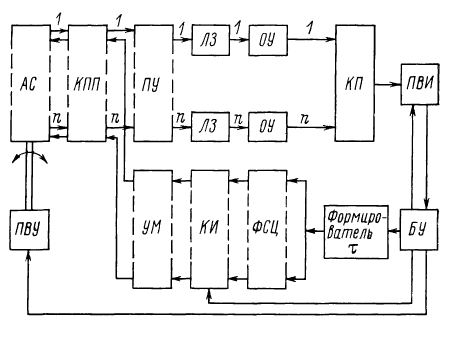
Рисунок 1.4 - Структурная схема ГА локатора секторно-шагового обзора
Гидролокатор секторно-шагового обзора позволяет одновременно обследовать акваторию в определенном секторе с помощью быстро сканирующей узкой ДН в приеме или излучении, осуществляемых электронными схемами, при неподвижной АС, а также дополнительно производить обследование более крупного заданного сектора в пределах углов ±180° путем электромеханического разворота АС. Наклон антенны в вертикальной плоскости производится чаще всего электромеханическим способом.
Упрощенная структурная схема одной из разновидностей секторно- шагового гидролокатора представлена на рисунке 1.4. В состав схемы, помимо известных блоков из гидролокатора шагового обзора, входят дополнительные блоки.
Необходимая длительность импульсов посылки τ вырабатывается формирователем при поступлении сигналов запуска от ПВИ (самописца или электронного индикатора) через БУ. Формирование ДН в излучении осуществляется с помощью фазосдвигающих цепей (ФСЦ). Высокочастотные сигналы коммутируются с помощью ключей коммутатора излучения (КИ). управляемых распределителем, и поступают на вход усилителей мощности (УМ). Выходы УМ через КПП подключаются к соответствующим элементам АС. Принимаемый АС эхосигнал через КПП поступает на входы предварительных усилителей (ПУ). Усиленные сигналы с ПУ подаются на линии задержки (ЛЗ) таких же типов, как и в генераторном тракте, с помощью которых осуществляется разделение каналов приема. С выходов ЛЗ сигналы поступают на основные усилители (ОУ), в которых происходит преобразование и усиление сигналов для обеспечения работы ПВИ, а затем через коммутатор приема (КП) сигналы подаются на ПВИ. Пеленг или курсовой угол определяются по номеру канала, в котором обнаружен эхосигнал, а дистанция - по шкале дальности.
Гидролокатор одновременного кругового обзора осуществляет одновременное обследование всей акватории в пределах 360° без пропусков обычно при помощи цилиндрической АС. Он позволяет получить наименьшее время обзора и визуализирует, например, картину промысловой обстановки вокруг судна. Известные в настоящее время варианты построения гидролокаторов одновременного кругового обзора можно разделить по способу решения ими двух основных задач.
Первая задача предусматривает быстрое облучение окружающей акватории: вторая - быстрый обзор облученной акватории таким образом, чтобы отсутствовала возможность пропуска эхосигналов с какого-либо направления за один цикл.
Для реализации одновременного облучения необходима большая энергетическая мощность, а для быстрого просмотра окружающей акватории в секторе 360° без пропусков необходимо использовать веер статических приёмных ДН или быстрое сканирование (внутриимпульсное) одной приемной ДН со скоростью, обеспечивающей круговой обзор без пропусков. Для этого ДН должна осуществлять один полный оборот за время, которое меньше минимально возможной длительности эхосигнала с любого направления (tск<τ). Вращение ДН осуществляется с помощью электронного коммутатора с частотой сканирования, равной fск = 1/tск. Синхронно с вращением ДН в реальном масштабе времени производится и развертка на электронном индикаторе кротового обзора. Эхосигнал с каждого направления состоит из "выборок", получающихся за счет быстрого сканирования приемной ДН.
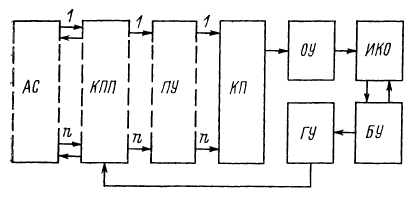
Рисунок 1.5 - Структурная схема ГА локатора одновременного кругового обзора
Способ приема с помощью веера приемных статистических ДН предусматривает наличие в составе гидролокатора ЛЗ, каждая из которых формирует ДН. Соседние ДН. пересекаясь на уровне 0.7 (минус 3 дБ) по звуковом давлению, одновременно перекрывают сектор 360°. Для отображения обстановки на индикаторе кругового обзора в этом случае необходим электронный коммутатор, который должен подключать выход каждой статической ДН к электронном индикатору. Достижения микроэлектроники позволили реализовать наклон ДН в вертикальной плоскости электронным способом в пределах определенных углов. Данный метод ведет к значительному увеличению количества каналов АС и станции в целом, т. е. N = m·n.,где m - количество каналов, необходимых для обзора в горизонтальной плоскости, n - количество поясов АС, обеспечивающих наклон ДН в вертикальной плоскости в пределах требуемого угла.
Структурная схема одного из вариантов ГА локатора с одновременным круговым обзором приведена выше на рисунке 1.5. КП опрашивает каналы ПУ за время, равное длительности импульса посылки. Число каналов, опрашиваемых одновременно, зависит от выбора ширины ДН. В КП имеются ЛЗ, которые служат для компенсации сдвигов фаз. обусловленных кривизной дуги, образованной элементами цилиндрической АС, участвующими в формировании ДН. После КП сигналы усиливаются ОУ и поступают на индикатор кругового обзора (ИКО). В приведенном примере излучение акустической энергии - ненаправленное, наклон ДН отсутствует».