
Запуск авиационных двигателей








13.1. Условия работы двигателя при запуске
Запуск газотурбинных авиадвигателей (ГТД) выполняется автоматически, в соответствии с программой запуска. В состав системы запуска входят стартер (электрический, воздушный или газотурбинный), системы электрическая (или электронная) управления запуском, зажигания, пусковая и рабочая топливные, устройства контроля параметров двигателя при запуске, защиты двигателя и агрегатов системы запуска от опасных режимов, а также блокировочные устройства, защищающие от неправильных действий при запуске. Для запуска ротор авиадвигателя (у двухконтурного авиадвигателя ротор второго каскада компрессора и вместе с ним первая ступень турбины) разгоняются стартером до угловой скорости, при которой рабочее топливо горит устойчиво. В процессе разгона включается система зажигания, в камеры сгорания сначала к пусковым, а затем к рабочим форсункам подается топливо, вступает в работу турбина. В дальнейшем ротор разгоняют совместно стартер и турбина, которая в конце запуска должна развивать момент, достаточный для самостоятельного быстрого выхода двигателя на режим малого газа.
Режимом малого газа ГТД называют устойчивый режим работы с минимальной мощностью, с которого обеспечивается надежный выход на любой рабочий режим за заданное время приемистости. Управление запуском состоит в дистанционной коммутации электрических управляющих цепей систем и агрегатов, обеспечивающих запуск в соответствии с программой. Управление выполняет система электроавтоматики по угловой скорости авиадвигателя и по времени.
Непосредственным показателем режима работы двигателя при запуске является его угловая скорость. В некоторых системах запуска ее используют как основной параметр запуска, в соответствии с которым осуществляется вся программа запуска. Одновременно все этапы запуска контролируют по времени, чтобы запуск чрезмерно не затянулся. В других системах запуска двигатель запускают по временной программе (двигатели АИ-20, -24, -25, все двигатели серии Д-ЗО). В таких системах обязательно вводят контроль окончания запуска и защиту от опасных режимов по угловой скорости.
Система запуска запускает авиадвигатель на земле, выполняет холодную прокрутку и ложный запуск, запуск в воздухе и аварийное прекращение запуска. Основным и наиболее полным (по совокупности и режимам работы агрегатов, участвующих в запуске) видом запуска авиадвигателя является его запуск на земле. Он включает все операции и весь комплекс систем, работающих при запуске.
Запуск авиадвигателя на земле разделяют на этапы:
первый - разгон ротора ГТД до угловой скорости ω1 при которой производительность компрессора достаточна для надежного воспламенения топлива и вступления в работу турбины;
второй - сопровождения стартером ротора ГТД до угловой скорости ω2, при которой турбина развивает мощность, достаточную для дальнейшего самостоятельного разгона двигателя с заданным ускорением; при ω= ω2 стартер отключается;
третий - самостоятельный выход авиадвигателя на режим малого газа (разгон от ω2 до ωМГ).
Зависимость моментов, действующих на вал авиадвигателя (или на вал стартера, если все моменты приведены к валу стартера), представлены на рис. 13.1.
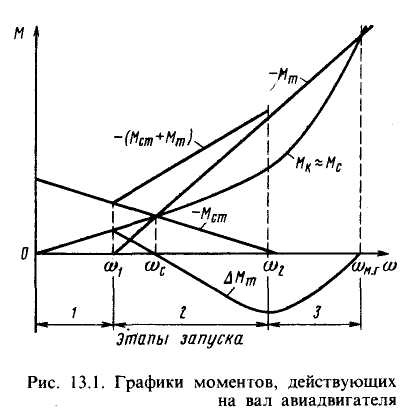
Момент сопротивления условно считают положительным и рассчитывают по формуле:
МС=МТР+МК,
где МТР - момент трения; МК - момент компрессора.
Поскольку МТР<< МК принимают, что МС≈ МК=КК·ω2, где КК - коэффициент компрессора. Моменты стартера МСТ и турбины МТ движущие. Они действуют против моментов сопротивления, но на рис. 13.1 они отложены в той же четверти, что и момент сопротивления (взяты с обратным знаком). Момент турбины МТ=КТ·ω (здесь КТ - коэффициент пропорциональности).
Уравнения движения системы статер-ротор авиадвигателя для первого, второго и третьего этапов запуска имеют вид:
1) МСТ - МК = МСТ - КК·ω2 = J(dω/dt);
2) МСТ +МТ -МК = МСТ + КТ·ω - КК·ω2 = J(dω/dt);
3) МТ - МК = КТ·ω - КК·ω2 = J(dω/dt),
где МТ - МК = ∆ МТ; J — суммарный момент инерции всех вращающихся частей, приведенный к валу якоря стартера (J = JАД + JCT. Здесь JАД - момент инерции роторов и воздушного винта авиадвигателя, JCT - момент инерции стартера).
При анализе процесса запуска все моменты сопротивления, движущие моменты и моменты инерции вращающихся тел, входящие в уравнение движения системы, должны быть приведены к валу стартера.
Характерными угловыми скоростями вращения ротора ГТД при запуске являются: ω1 -начала подачи топлива в камеру сгорания; ωС - соответствующая условию МТ = МК; ω2 - при отключении стартера; ωМ - максимальной мощности стартера; ωК - режима холодной прокрутки, ωМАХ - максимальная ротора ГТД. Для сокращения записей вводят "понятие относительной угловой скорости  = ω/ωМАХ.
= ω/ωМАХ.
Наиболее ответственным является второй этап запуска. Он характерен самыми высокими температурами турбины и узким диапазоном устойчивой работы компрессора. Увеличение продолжительности запуска приводит к повышению температуры лопаток турбины, снижению их прочности и ресурса.
В системах запуска ГТД применяют главным образом электрические и воздушные стартеры. На современных двухконтурных ТРДД используют воздушный стартер, представляющий собой одноступенчатую воздушную турбину с понижающим редуктором и=ωТ/ωВЫХ.ВАЛА = 8-10 и обгонной муфтой для расцепления выходного вала стартера и трансмиссии авиадвигателя. В состав стартера также входят сигнализатор давления воздуха перед силовым аппаратом турбины, узел управления стартером, содержащий электромагнит и центробежный выключатель, который защищает стартер от опасных угловых скоростей.
Воздух, необходимый для работы стартера, берется либо от ВСУ самолета (турбоагрегата ТА-6, -8), либо от наземной УВЗ (турбоагрегата, установленного на автомашине), либо от компрессора работающего авиадвигателя. На самолетах Ил-62 с авиадвигателями НК-8-4 для запуска авиадвигателя используют воздушную турбину ППО-62М привода постоянных оборотов синхронного генератора.
Управляющим устройством системы электроавтоматики запуска является автомат запуска пусковой панели АПД. Она подает команды на коммутацию электрических цепей управления агрегатами запуска в соответствии с заложенной в ней программой по времени и по угловой скорости. Топливная система (насос-регулятор, насосы подкачки топлива, автомат дозировки и другие ее элементы) непосредственно к системе запуска не относится, но обеспечивает запуск. Управляет электромагнитными клапанами пускового и рабочего топлива также автомат запуска пусковой панели АПД.
Характерные угловые скорости ротора в о. е. для газотурбинных авиадвигателей представлены в табл. 13.1.
Таблица 13.1
Характерные относительные значения угловых скоростей роторов авиадвигателей
| Угловая скорость | ТРД | ТРДД | ТВД |





| 0.09-0.12 0.10-0.16 0.30-0.40 0.13-0.25 0.13-0.15 | 0.15-0.20 0.23-0.28 0.40-0.45 0.23-0.25 0.23-0.27 | 0.14-0.18 0.30-0.35 0.45-0.55 0.20-0.25 0.20-0.25 |
При запуске ГТД стремятся достичь минимального времени второго этапа запуска. На этом этапе одновременно работают стартер и турбина двигателя, задача заключается в управлении стартером таким образом, чтобы он обеспечивал надежное сопровождение двигателя и достижение им угловой скорости ω2 за заданное время t2 (время разгона до угловой скорости ω1 ничем не регламентировано, кроме необходимости сокращения общего расхода энергии на выполнение запуска).
При использовании воздушных стартеров управление ими сводится к поддержанию постоянства давления воздуха перед сопловым аппаратом. Если для запуска авиадвигателя применяют электрические стартеры, управление заключается в изменении напряжения питания и потока возбуждения стартера по нужному закону при разгоне ротора газотурбинного двигателя.
13.2. Управление электростартерами при запуске ГТД
От электростартеров запускают авиадвигатели АИ-20К,-24 на самолетах Ан-12, -24; газотурбинные двигатели ВСУ (ТГ-16, ТА-6, -8) и авиадвигатели на вертолетах. В качестве стартеров используют стартер-генераторы (СТГ) постоянного тока. Необходимость сокращения времени запуска, расхода электроэнергии и уменьшения потерь в цепях стартеров привела к разработке способов управления электростартерами. Их сущность заключается в изменении напряжения на якоре и потока возбуждения стартера для улучшения временных и энергетических показателей запуска.
Все эти способы подчинены общей цели: сделать запуск наилучшим по определенным показателям.
Для улучшения характеристик пуска определяют оптимальное передаточное отношение стартер-авиадвигатель для минимизации времени разгона стартера от какой-то исходной до заданной конечной угловой скорости. Для этого рассматривают выбор передаточного отношения для разгона привода от начала запуска до угловой скорости ω1 при которой вступает в работу турбина. При заданном максимальном (пусковом) моменте стартера МСТ.К = МСТ.МАХ минимизация этого интервала времени позволяет уменьшить потери, общий расход энергии и время запуска. Для упрощения задачи считают, что основным нагрузочным моментом является динамический момент МДИН =J(dω/dt), а моментом компрессора МК, приведенным к валу стартера, пренебрегают.
Так как СТГ имеет параллельное возбуждение, уравнение его механической характеристики имеет вид:
МСТ = МСТ.К(1 - ω/ω0).
Уравнение движения системы стартер-ротор ГТД записывают так:
J(dω/dt) = МСТ.К(1 - ω/ω0),
откуда
 или
или  .
.
В результате интегрирования время разгона от ω = 0 до ω0 = ω1 определяется уравнением
t1=(J ω0/МСТ.К)ln[1/(1- ω1/ω0)].
Передаточное отношение и между стартером и авиадвигателем находят из выражения ωСТ= uωАД, откуда и = ωСТ / ωАД.
Приведенный к валу стартера момент инерции J = JCT + (1/ и 2) JАД. Учитывая, что при использовании для запуска стартер-генераторов передаточное отношение и = 1.35 – 1.42, приведенный к якорю стартера момент инерции авиадвигателя (1/ и 2) JАД>> JCT. Без ущерба для точности принимают, что JCT≈(1/ и 2) JАД.
Время разгона до угловой скорости ω1 с учетом допущений
 (13.1)
(13.1)
Для определения передаточного отношения  , обеспечивающего минимум времени разгона до угловой скорости ω1 уравнение (13.1) исследуем на экстремум:
, обеспечивающего минимум времени разгона до угловой скорости ω1 уравнение (13.1) исследуем на экстремум:
 ,
,
откуда -  ;
;
ln(1-uω1АД/ ω0)=0.5 uω1АД/ ω0(1-uω1АД/ ω0).
В результате графического решения этого уравнения получают оптимальное передаточное отношение, обеспечивающее минимум времени разгона системы стартер - авиадвигатель до угловой скорости, при которой вступает в работу турбина. Как правило, это отношение
uОПТ=0.73·ω0/ω1АД.
В электрических системах запуска ротор авиадвигателя разгоняют СТГ, который в полете работает в генераторном режиме, а при запуске - в стартерном. При работе в режиме стартера стартер-генератор должен развивать необходимую механическую мощность для того, чтобы быстро разогнать ротор авиадвигателя. Максимальную мощность СТГ должен развить при угловой скорости ω1 когда момент сопротивления максимален (см. рис. 13.1):
РСТ = ω1 (МСТ + МДИН) = МЭ.СТ ·ω1,
где МДИН - динамический момент, необходимый для создания нужного ускорения dω/dt; МЭ.СТ - электромагнитный момент стартера.
Электромагнитный момент стартера М = С· IaФМАХ; поток возбуждения в стартерном режиме имеет наибольшее значение. Электромагнитная мощность стартера РЭ.СТ=МЭ.СТ ·ω1=  ·ω1АД ·МЭ.СТ .
·ω1АД ·МЭ.СТ .
После того как запуск произошел, СТГ переходит в генераторный режим, работая с минимальной для этого режима угловой скоростью и тем же максимальным потоком ФМАХ. В данном случае электромагнитные моменты СТГ в стартерном и генераторном режимах равны МЭ.Г = МЭ.СТ; минимальной угловой скоростью для генераторного режима является скорость малого газа авиадвигателя ωМГД.
Электромагнитную мощность генератора РЭ.Г=МЭ.Г ·ωГ..МIN= МЭ.Г ·ωМГД·uГ, где ωМГД угловая скорость малого газа двигателя uГ = ωГ / ωАД.
При работе с минимальной угловой скоростью, номинальным током и максимальным потоком возбуждения СТГ развивает наибольший для генераторного режима момент. Соотношение электромагнитных мощностей в стартерном и генераторном режимах находят, считая, что максимальные электромагнитные моменты машины в стартерном и генераторном режимах равны МСТ.МАХ=МГ.МАХ. Используя это условие и выражения для электромагнитных мощностей в стартерном и генераторном режимах, мощность стартера через мощность генератора и параметры обоих режимов находят так:
РЭ.СТ=РЭ.Г · uСТ ·ω1Д КП/ uГ ·ωМГД . (13.2)
Для оценки возможности использования СТГ для запуска ГТД определяют мощность, которую он может развить, работая в стартерном режиме. С учетом кратковременности стартерного режима (60 - 70 с) ток IСТ якоря стартера при запуске может превышать ток генераторного режима в КП раз (IСТ = КП ·IГ , где КП - коэффициент перегрузки, равный 1.3 – 1.4). Для ГТД, запускаемых от стартер-генераторов, передаточные отношения равны:
uСТ=ωСТ/ωАД=1.3-1.4; uГ = ωГ / ωАД.≈0.5;  ≈0.15;
≈0.15;  ≈0.5
≈0.5
Подставив эти данные в формулу (13.2), оценивают соотношение мощностей СТГ в стартерном и генераторном режимах. Если учесть, что в современных системах запуска напряжение VCT на якоре СТГ составляет (2 - 2,2)UГ.ПОТ, то РЭ.СТ=РЭ.Г (1.5 – 1.7) РЭ.Г.
В стартер-генераторах, применяемых при запуске ГТТ, для повышения момента используют планетарный редуктор с обгонной муфтой. При работе в стартерном режиме угловая скорость выходного вала стартера, сцепленного с коробкой передач авиадвигателя, примерно в 3 раза меньше скорости вращения якоря СТГ. При работе СТГ в генераторном режиме вращение от коробки передач авиадвигателя передается на якорь помимо редуктора. Изменение передаточного отношения осуществляют за счет обгонной муфты. Она при передаче движения от авиадвигателя к генератору сцепляет ведущий (гибкий) вал с полым валом, на котором посажен пакет якоря. При передаче движения от СТГ к авиадвигателю сцепления полого и гибкого валов не происходит. Передача движения от полого вала к выходному валу осуществляется через планетарный редуктор (рис. 13.2).
|
|
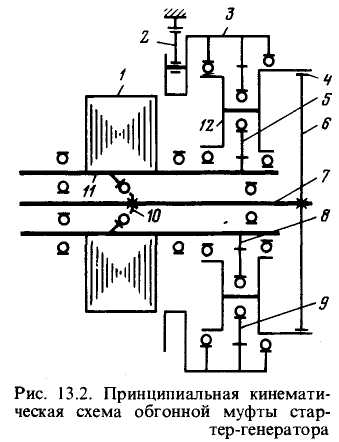
При работе в стартерном режиме момент от якоря 1 через шестерню 8 и сателлиты 5 передается на корпус редуктора 3, который в этом режиме заклинивается храповой собачкой 2 и неподвижен. Сателлиты приводят в движение водило 12. Оно своей шестерней с внутренним зацеплением 4 через шестерню 6 вращает выходной вал, жестко связанный с гибким валом 7. В стартерном режиме муфта свободного хода не заклинена и полый вал связан с гибким через редуктор, уменьшающий угловую скорость гибкого вала в отношении 3.18:1. В генераторном режиме вследствие изменения направления передачи момента (от двигателя к генератору) собачка 2 расцепляет корпус 3 редуктора и корпус стартера, а муфта свободного хода 10 заклинивает, сцепляя гибкий 7 и полый 11 валы помимо редуктора.
Угловая скорость обоих валов одинакова.
13.3. Способы управления электростартерами при запуске ГТД.
Прямой пуск
Запуск ГТД выполняют от СТГ, установленных на главных двигателях, запуск ГТД вспомогательных силовых установок - от генераторов постоянного тока, входящих в состав ВСУ и работающих при запуске в стартерном режиме от самолетных аккумуляторов или наземных источников. Необходимость уменьшения времени запуска, потерь и расхода электроэнергии при запуске привела к разработке ряда способов управления электростартерами воздействием на подводимое к ним напряжение и на поток возбуждения. Критериями качества работы стартера при запуске являются: к. п. д. пуска η=АК/ АЭ - отношение запаса кинетической энергии системы к потребленной стартером при запуске электроэнергии; время пуска tП; равномерность потребления тока (важная характеристика для учета расходования энергии аккумуляторов). ГТД запускают от аэродромных источников и от самолетных ВСУ. От аккумуляторов запускают газотурбинные двигатели вспомогательной силовой установки.
Для упрощения оценки качества запуска ГТД при использовании различных способов управления стартерами вводят следующие допущения:
основной нагрузкой стартера является динамический момент, так как запуск - это переходный процесс привода стартер-авиадвигатель, обладающего большим моментом инерции и протекающий со значительными ускорениями. По этой причине для простоты анализа пренебрегают моментами компрессора и турбины, считая, что неучет их действия не сказывается существенно на процессе разгона ротора. В реальных системах запуска при ложном запуске, когда не работает турбина, за время цикла угловая скорость отключения турбины не достигается. Система при этом режиме работы отключается по времени. Обычно в процессе запуска момент турбины разгружает стартер и ускоряет разгон, так как обычно система отключается по угловой скорости раньше отработки цикла запуска. Однако учет влияния моментов МК и МТ усложняет анализ работы стартера, поэтому ими пренебрегают;
пренебрегают электромагнитными переходными процессами;
не учитывают механические и магнитные потери в стартере и влияние реакции якоря на его механические характеристики.
При запуске ГТД применяют следующие способы управления стартерами: прямой пуск - включение стартера на постоянное напряжение; ступенчатое уменьшение потока возбуждения стартера; плавное уменьшение потока возбуждения стартера; многоступенчатое повышение напряжения на якоре стартера; плавное повышение напряжения на якоре стартера.
В реальных системах запуска авиадвигателей и газотурбинного движения ВСУ эти способы применяют комплексно, что позволяет получить достаточно высокие показатели качества запуска. Угловая скорость отключения стартера ω2 составляет около 70 % от его скорости идеального XX при номинальном потоке возбуждения ФНОМ.
Прямой пуск состоит в разгоне системы стартер - ГТД при включении стартера на номинальное напряжение. У стартера с параллельным, возбуждением обмотка возбуждения подключается несколько раньше обмотки якоря. Пуск происходит при постоянном потоке Ф= ФНОМ =const. Уравнение движения привода при МС = 0 имеет вид:
М = J (d ω /dt),
Где 
После преобразования получают:
 .
.
Так как JRA/(C2Ф2)=ТМ, то ТМ (dω /dt) +ω= ω0.
Отсюда ω = ω0+(ωНАЧ- ω0)exp(-t/ТМ)
При ωНАЧ =0; ω = ω0 [1-exp(-t/ТМ)];
ω = ω2 = 0.7ω0,
 .
.
Потребленная стартером из сети при пуске электроэнергии
 .
.
Используя соотношения U=С·ω0·Ф и М=С·I а·Ф = J·(dω/dt), найдем, что I а = [J/С·Ф)]·(dω/dt).
Поставив значения U и I а в выражение для расхода электроэнергии, получают:
 .
.
При ω1=0 и ω2 = 0,7 имеем  . Тогда
. Тогда
При t = 1,2TM в конце запуска значение тока ia=IП·ехр(-t / TM)= IП, а отношение пускового тока к току отключения равно 3,33.
Как видно, процесс запуска заканчивается сравнительно быстро, к. п. д. невысок, неравномерность тока значительная. В чистом виде из-за малого к. п. д. и трудности достижения ротором авиадвигателя (и соответственно стартером) угловой скорости отключения ωК, этот способ пуска используют только для сравнения с более совершенными, которые рассмотрены в разделах 13.4-13.6.
13.4. Ступенчатое уменьшение потока возбуждения
Ступенчатое уменьшение потока возбуждения стартера применяют для управления им в системах запуска турбоагрегата ТГ-16. Напряжение на якоре стартера в течение всего запуска постоянно и равно номинальному. На первом этапе пуска стартер работает при максимальном магнитном потоке Ф1 значительно большем, чем поток Ф2 на втором этапе (рис. 13.3).
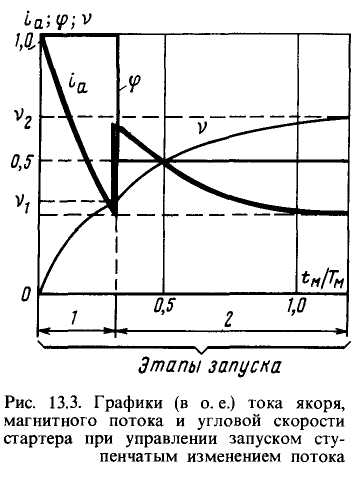
Поток от значения Ф1 до значения Ф2 уменьшается при угловой скорости стартера ω1, которая должна быть достаточно близка к угловой скорости идеального XX ω10 = U /(СФ1). В противном случае уменьшение потока приведет к провалу, а не к возрастанию угловой скорости. В реальных системах запуска поток стартера уменьшают после вступления в работу турбины и частичной загрузки стартера. Стартер на втором этапе обеспечивает надежное сопровождение турбины до скорости его отключения ω2 и сокращает время второго этапа.
Электроэнергия, потребленная от источника за весь запуск,
 .
.
В качестве условия переключения принимают равенство тока якоря в момент переключения и в конце пуска I1 = I2 или (U - C ω1 Ф1)/RA=(U - C ω2 Ф2)/RA, откуда ω1 Ф1= ω2 Ф2 .Выразив из последнего уравнения поток Ф1, как Ф1= Ф2(ω2/ω1), получают
 .
.
Для определения оптимальной угловой скорости переключения потока находят экстремум функции
 ,
,
откуда ω1=ω2/2. Считая, что U = С·ω0·Ф2; ω2=0,7·ω0 и, используя соотношение ω1=ω2/2, определяют:
расход электроэнергии при пуске:
 ;
;
к. п. д. пуска
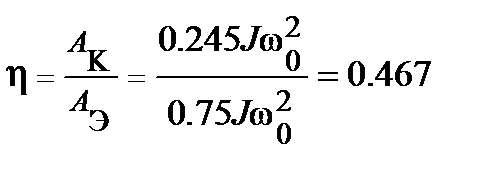 .
.
Время пуска определяют как суммарное время работы на первом и втором его этапах: tП= t1 + t2.
На первом этапе пуска для угловой скорости используют уравнение
ω0=ωС+(ωНАЧ-ωС)·ехр(-t / TM). Для этого этапа ω=ω1= ω2/2; ωС= ω0/2; ωНАЧ=0.
Тогда  , где
, где  ;
;
Здесь  .
.
Электромеханическая постоянная времени на первом этапе:
 .
.
Используя общее решение для второго этапа ω=ωС+(ωНАЧ-ωС)·ехр(-t2/ TM) и подставляя значения ω=ω2=0.7ω0; ωНАЧ=0.5 ω2=0.35 ω0; ωС=ω0, получают  . Время работы стартера tП=1,07TM.
. Время работы стартера tП=1,07TM.
Изменение тока при этом способе управления для аккумуляторной батареи благоприятнее, чем при прямом пуске. Основной бросок тока (пусковой ток) на первом этапе быстро затухает. Второй бросок тока значительно меньше первого. Ступенчатое уменьшение потока возбуждения имеет преимущества перед прямым пуском по энергетическим показателям и по времени запуска. Авиагенераторы, применяемые при запуске ВСУ в качестве стартеров, допускают значительную кратность тока возбуждения.
В системах запуска ВСУ поток меняется в два этапа. На втором этапе ток возбуждения стартера ограничен сопротивлением в цепи возбуждения, на первом же это сопротивление шунтировано контактами контактора, управляющего запуском ГТД.
13.5. Плавное уменьшение потока стартера
Способ управления стартером плавным уменьшением его потока широко применяют при запуске авиадвигателей от СТГ. При этом способе поток на втором этапе запуска двигателя плавно уменьшают. При этом возрастает угловая скорость и обеспечивается надежное сопровождение авиадвигателя до конца запуска. Уменьшение потока, как и при его ступенчатом изменении, должно начинаться при угловой скорости ω1, достаточно близкой ω01= U/(CФ1). Если поток начать снижать слишком рано, угловая скорость может упасть, а не возрасти. Поток возбуждения стартера, начиная с угловой скорости ω1 уменьшают по такому закону, который при нарастании угловой скорости обеспечил бы постоянство противо-э.д.с. машины Е=СωФ=const. При соблюдении этого условия поток возбуждения должен изменяться обратно пропорционально угловой скорости привода Ф=Е/(Сω), а ток якоря в процессе регулирования изменением потока должен оставаться постоянным, т. е.
IА=(U-СωФ)/ RА= const.
Постоянство тока и противо-э.д.с. означает и постоянство электромагнитной мощности РЭ= Е IА=const. Поскольку при IА=const электрические потери в якоре постоянны  , а магнитные потери вследствие уменьшения потока при увеличении угловой скорости меняются незначительно, считают, что такой закон изменения потока обеспечивает и приблизительное постоянство потребляемой мощности:
, а магнитные потери вследствие уменьшения потока при увеличении угловой скорости меняются незначительно, считают, что такой закон изменения потока обеспечивает и приблизительное постоянство потребляемой мощности:
 ,
,
где  - механические потери.
- механические потери.
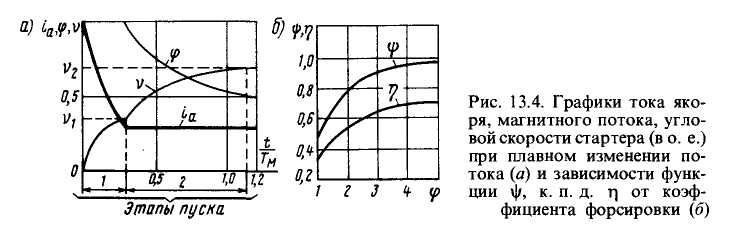
При работе с постоянным потоком максимальная электромагнитная мощность стартера достигается при t1=0,69ТМ, что соответствует угловой скорости ω≈0,5ω0. Диаграммы тока якоря, потока возбуждения и угловой скорости стартера (в о.е.) приведены на рис. 13.4,а.
При постоянном напряжении питания якоря и максимальном потоке возбуждения стартера Ф1=const система стартер - ротор ГТД разгоняется до угловой скорости ω1. Начиная с момента времени t1, соответствующего угловой скорости ω1 поток возбуждения уменьшают таким образом, чтобы выполнялись условия Е = СωФ=const и 1А=const.
Поток на втором этапе запуска снижают от его форсированного значения Ф1 до номинального значения, соответствующего угловой скорости ω2 в момент отключения стартера. Из условия постоянства противо-э.д.с. и тока якоря при работе на втором этапе запуска следует, что поток в функции от угловой скорости меняется по закону Ф(ω)=ФН(ω2/ω), где ω2 - конечная угловая скорость стартера; ω - текущее значение угловой скорости. Максимальное значение потока равно Ф1(ω)=ФН(ω2/ ω2).
Электроэнергия, потребляемая стартером при запуске, равна суммарной энергии, которую стартер потребляет на первом и втором этапах запуска:
 .
.
Используя уравнение движения привода М-MС= J(dω/dt), выражая ток в виде
ia =[J/(СФ)](dω/dt), и учитывая, что U=Сω0ФПОТ, выражение для электроэнергии, израсходованной при запуске, записывают так:
 .
.
Функция АЭ = f (ω0) экстремума не имеет.
Запасенная системой в процессе разгона кинетическая энергия
 .
.
К. п. д. запуска при этом способе управления определяют из соотношения:
 . (13.3)
. (13.3)
Так как на этапе регулирования потоком между значениями угловой скорости и потока должно выполняться соотношение ω2/ω1 = Ф1/Ф2, то выражение (13.3) переписывают в виде:
 ,
,
где  - коэффициент форсировки потока.
- коэффициент форсировки потока.
Значение функции  при коэффициентах формировки потока φ=2-3 возрастает довольно быстро, однако дальнейшее увеличение коэффициента форсировки (φ >3) не вызывает быстрого возрастания функции ψ (рис. 13.4,б). Поэтому в реальных системах запуска делают обычно φ=2.5-3 . Поскольку ω2/ω1= 0,7, то
при коэффициентах формировки потока φ=2-3 возрастает довольно быстро, однако дальнейшее увеличение коэффициента форсировки (φ >3) не вызывает быстрого возрастания функции ψ (рис. 13.4,б). Поэтому в реальных системах запуска делают обычно φ=2.5-3 . Поскольку ω2/ω1= 0,7, то  . Полученная зависимость η =f(φ) позволяет выбрать значение φ , эффективно влияющее на к. п. д.
. Полученная зависимость η =f(φ) позволяет выбрать значение φ , эффективно влияющее на к. п. д.
Время запуска определяют как сумму интервалов времени при работе на первом и втором этапах пуска tП= t1+ t2 - Значение t1 определяют, используя выражение:
ω1= ω01 [1-eхр(-t1/ TM)],
где  ;
;
 ;
;
Время t2 запуска на втором этапе определяют из уравнения движения системы:
С IАФ = J(dω/dt), где Ф = ФН(ω2/ ω); IА=(U - С ω Ф/RА) = const.
Используя законы изменения Ф и IА в уравнении движения привода с учетом того, что U = С ωоФн, получают
 или
или  ,
,
откуда
 .
.
При φ = 2 к.п.д. запуска η=0.56, время пуска tП= t1+ t2= 1,17ТМ.
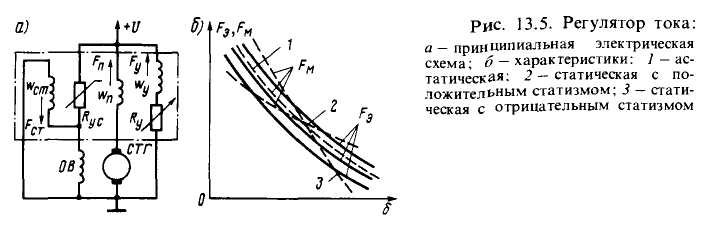
Для плавного изменения потока возбуждения стартера применяют угольный регулятор тока РУТ-600. Основной рабочей обмоткой регулятора тока является его последовательная (токовая) обмотка wП (рис. 13.5, а), по которой проходит весь ток якоря стартера. В отличие от регулятора напряжения электромагнитная сила FП последовательной обмотки сжимает угольный столб, а реакция пружины FПР ослабляет сжатие. Управляющая обмотка wУ служит для постройки регулятора на нужное значение тока якоря стартера; ее электромагнитная сила F, тоже сжимает угольный столб. Когда регулятор включен, любое отклонение тока якоря СТГ от значения, установленного при настройке, приводит к изменению силы FП. В результате изменяются сжатие угольного столба и его сопротивление RУС, ток возбуждения СТГ и его противо-э.д.с. Е=СωФ. Плотность и значение приращения противо-э.д.с. таковы, что их воздействие устраняет отклонение тока (с определенной статической ошибкой) от его значения, установленного при настройке. В системе запуска с плавным изменением потока возбуждения возможно возникновение неустойчивого режима вследствие особенностей параметров регулятора. Точность стабилизации тока в первую очередь определяется чувствительностью регулятора и цепи возбуждения, которую характеризуют коэффициенты передачи электромагнита кЭМ=(д FЭ/д ip)0, угольного столба КУС=(д КУС/дδ)0 регулятора и КВ=( д iВ /д RУС)0 обмотки возбуждения (здесь iР = iА+ wУiУ/wП - суммарный ток электромагнита регулятора; δ - воздушный зазор).
С увеличением чувствительности регулирование приближается к астатическому, но уменьшается запас устойчивости системы. Учитывая, что характеристики реальных угольных регуляторов (рис. 13.5,б) близки к астатическим, не исключена опасность неустойчивой работы. Для повышения устойчивости в регулятор тока вводят ОСС по току возбуждения СТГ, используя специальную обмотку стабилизации wCT, включенную на падение напряжения на обмотке возбуждения. Сила электромагнита FЭ = FП+ FУ- FСТ.
13.6. Управление стартером многоступенчатым и плавным изменением напряжения
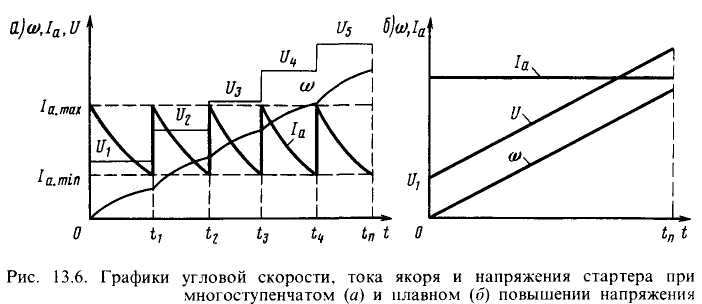
Многоступенчатое и плавное повышение напряжения на якоре стартера применяют часто. Запуск при многоступенчатом повышении напряжения используют для двигателей АИ-20, -24 от ВСУ ТГ-16, повышающей напряжение пятью ступенями до 60 В. Для запуска с плавным повышением напряжения до 70 В служат аэродромные источники. Запуск с многоступенчатым изменением напряжения применяют при питании стартера от генератора, напряжение которого повышают ступенями, регулируя его ток возбуждения (рис. 13.6, а). Для этого в определенные моменты запуска в цепь обмотки электромагнита регулятора напряжения, входящего в систему запуска, в определенной последовательности вводят добавочные сопротивления.
Моменты перестройки регулятора и значения ступеней выбираются так, чтобы броски токов при переключениях были бы одинаковы и равны броску тока при пуске. Значения ступеней напряжения и моментов переключения выбирают и из соображений приближения процесса запуска к оптимальному.
Для двигателя постоянного тока независимого возбуждения при МС= const оптимальным является разгон при Ia=const. Значение тока якоря, а следовательно, и ускорения, выбирают по заданному значению потерь и с учетом ограничений, накладываемых на систему. В частности, на этом основании могут выбираться действующее или среднее значение тока при многоступенчатом изменении напряжения.
При многоступенчатом изменении напряжения стараются выполнить два условия: равенство бросков токов Ia max при переключениях на всех ступенях и равенство минимальных токов Ia min в конце каждой ступени.
Эти условия записывают в таком виде:
а)  (13.4)
(13.4)
или  .
.
б)  (13.5)
(13.5)
или  ,
,
где ω0i - угловая скорость идеального XX на i-й ступени.
Из выражения (13.4):
 ,
,
Из уравнения (13.5):
 .
.
Из условия равенства бросков тока при переключении ступеней следует, что приращение напряжения (в начале) каждой ступени должно быть равно приращению э.д.с. на каждой ступени:
 .
.
Напряжение, подводимое к якорю стартера на всех ступенях, кроме первой, меняется n-1 равными ступенями:
∆U = E1=(Umax- U1):(n-1).
Время запуска равно сумме временных интервалов работы на каждой ступени пуска. Для i-й ступени:
 ;
;  ,
,
где ωiК - угловая скорость в конце i-й ступени.
Из условия равенства максимальных и минимальных значений тока якоря на ступенях пуска следует, что
откуда  .
.
Время пуска tП = nt1.
В пределе при  и
и  получается пуск с плавным повышением напряжения. Для этого напряжение также должно меняться плавно от некоторого начального значения U1 (рис. 13.6,б).
получается пуск с плавным повышением напряжения. Для этого напряжение также должно меняться плавно от некоторого начального значения U1 (рис. 13.6,б).
Характер изменения угловой скорости системы стартер - авиадвигатель определится из уравнения СФ(U1/ RА)= J(dω/dt), откуда dω= (СФ/J)·(U1/ RА)dt и ω=[СФ/(J·RА)]·[СФ/(СФ)]U1t или
 . (13.6)
. (13.6)
При условии IА=U1/ RА=const угловая скорость растет по линейному закону во времени.
До конечной угловой скорости ωК стартера время пуска
 (13.7)
(13.7)
Закон изменения напряжения при пуске находят из условия постоянства тока якоря в процессе пуска:
[U(t)-СωФ]/RА= U/ RА=IA=const.
Заменяя в формуле (13.7)  , получают, что
, получают, что
 . (13.8)
. (13.8)
Из уравнения (13.8) следует, что при условии IА=const напряжение меняется во времени по линейному закону. Учитывая, что и угловая скорость стартера во времени также меняется по линейному закону (см. уравнение 13.6), следует, что и напряжение также является линейной функцией угловой скорости. Зная количественную связь между временем и угловой скоростью, которая определяется выражением t =ТМ(ω/ω01), находят закон изменения напряжения в зависимости от угловой скорости:
 .
.
Экономичность пуска определяется значением его к.п.д.: 
(здесь ω2 - угловая скорость стартера при его отключении);
АЭ - расход электроэнергии при пуске  . Подставляя в выражение для расхода электроэнергии при пуске выражения
. Подставляя в выражение для расхода электроэнергии при пуске выражения
 ,
,
получают  .
.
Подставив выражение расхода электроэнергии в формулу для к.п.д., определяют зависимость к.п.д. от величин, характеризующих запуск при линейном законе нарастания напряжения от угловой скорости
 .
.
При пренебрежении моментами статической нагрузки, полагая МС=0 (или МС=const), разгон системы СТГ-ГТД до заданной угловой скорости при постоянном потоке возбуждения и постоянном токе якоря является оптимальным переходным процессом.
Значение 1А и dω/dt выбирают исходя из допустимых потерь за процесс разгона:
и ограничений, накладываемых на узлы системы по условиям работы (допустимые ускорения, допустимый ток якоря по условиям коммутации, допустимое значение напряжения на якоре стартера и т. д.).
Управление запуском плавным повышением напряжения - это наиболее совершенный способ управления стартером, позволяющий разогнать ГТД до заданной частоты вращения за минимальное время при заданных потерях и ограничениях. При учете моментов МК и МТ закон управления получается сложнее. Из-за сложности его технической реализации в реальных системах производится запуск при постоянном токе якоря.
Глава 14