
Привод органов управления, антенны радиолокатора








И ПОДЪЕМНО-ТРАНСПОРТНЫХ УСТРОЙСТВ ЛА
12.1. Органы управления и рулевые машины
К органам управления ЛА относят рули, элероны, элероны-интерцепторы, триммеры и управляемый стабилизатор. Управление по тангажу состоит из устройства управления рулем высоты, его триммером и стабилизатора. Управление рулем высоты механическое от колонок, расположенных перед пилотами. В механическую проводку включается рулевая машина АБСУ. На задней кромке каждой половины руля высоты установлены триммеры, которыми управляют из кабины экипажа от штурвальчиков (ручное) и от электромеханизма (дистанционное). Управляемый стабилизатор имеет электропривод или электрифицированный гидропривод. Управление по крену включает в себя устройства управления элеронами-интерцепторами, элеронами и их триммерами. Элеронами управляют за счет поворотов штурвалов. Управление по курсу - это управление рулем направления и его триммером. Рулем направления управляют с помощью педалей. В механические проводки систем управления по крену и курсу также включают рулевые машины.
Пилот воздействует на ЛА с помощью командных рычагов (колонка, штурвал, педали), перемещение которых вызывает перемещение органов управления. Возрастание скорости полета, а также увеличение размеров ЛА приводит к повышению усилий на командных рычагах. Мускульной силы пилота становится недостаточно для преодоления шарнирных моментов поверхностей управления. Для облегчения управления используют бустеры (усилителями мощности). Они могут быть обратимыми и необратимыми. На ЛА применяют бустерное управление по необратимой схеме, когда всю аэродинамическую нагрузку воспринимает бустер, однако при этом пилот теряет ощущение управления и для того, чтобы создать ощущение управления на командных рычагах, ставят специальные загрузочные механизмы.
Так как эффективность органов управления меняется с изменением высоты и скорости полета, то и жесткость загрузочных механизмов должна меняться. Например, при увеличении высоты полета эффективность рулей снижается. В этом случае необходимо увеличить отклонение командных рычагов и снизить жесткость загрузочных механизмов. Поэтому в системах с необратимым бустерным управлением применяют автоматы, изменяющие жесткость загрузочных механизмов и передаточное отношение между командными рычагами и бустерами в зависимости от изменения условий полета. Использование автоматов существенно облегчает управление ЛА, так как позволяет пилоту сохранять практически одинаковую технику пилотирования при изменении скорости и высоты полета. Кроме технико-экономических требований, общих для всего электрооборудования, к приводам органов управления ЛА предъявляют ряд специфических. Они должны быть практически безотказными в работе, обладать высокой чувствительностью и точностью следящей системы, передающей перемещения от командного агрегата к органам управления, иметь высокое быстродействие и широкий диапазон регулирования скорости перекладки рулей, быть устойчивыми в управлении с высоким качеством переходных процессов при управлении ЛА и обладать высокой жесткостью системы управления, необходимой для предотвращения флаттера.
Практическую безотказность приводов достигают комплексом мер, направленных на обеспечение работоспособности систем управления, при возможных отказах ее элементов и агрегатов. К этим мерам относят:
применение резервирования, при котором обеспечивается разделение функциональной системы на независимые подсистемы, способность системы выполнять функции при отказе части подсистемы и возможность перехода на другие режимы;
исключение возможности возникновения возмущений на выходе системы управления в момент отказа подсистемы;
применение системы контроля, обеспечивающей контроль состояния во время предполетной подготовки и непрерывный контроль в полете; при необходимости - автоматическое отключение отказавших подсистем;
обеспечение высокой надежности элементов системы управления.
На ЛА с необратимым бустерным управлением без перехода на безбустерное управление силовые приводы органов управления должны питаться от независимых электрических и гидравлических систем.
Для управления элеронами и рулями применяют электрифицированный следящий гидропривод (исполнительный орган - гидравлическая рулевая машина — ГРМ) и электрический следящий привод (исполнительный орган — электрическая рулевая машина - ЭРМ). Электрифицированный следящий гидропривод улучшает управляемость и маневренные свойства ЛА, увеличивает устойчивость в режиме стабилизации, улучшает противофлаттерные свойства рулевых систем. В зависимости от метода резервирования приводы подразделяют на три типа: многоканальный следящий привод с детектором отказов, который обнаруживает и устраняет неисправность (отключением или замещением резервированного канала); многоканальный следящий привод с резервированием по принципу «голосования большинством», в котором отказ одного канала компенсируется действием исправных каналов, а также дублированный следящий привод.
Гидравлическая рулевая машина представляет собой резервированный привод по принципу «голосования большинством» и состоит из трех отдельных агрегатов управления, установленных на одном основании. Штоки агрегатов через рычажную систему соединены с общим выходным звеном ГРМ. Усилия, развиваемые поршнями агрегатов, передаются и суммируются на выходном звене. ГРМ остается работоспособной при отказе одного любого агрегата управления, но при этом снижается усилие на выходном звене. Электрическое питание агрегаты управления получают от трех независимых электрических сетей, а гидравлическое - от трех независимых гидросистем.
Разрез одного агрегата управления представлен на рис. 12.1, а. На рисунке агрегат управления представлен упрощенно для пояснения принципа работы. В действительности шток, например,, выполнен в виде гидропружины, что дает возможность пересиливания двум агрегатам управления при отказе третьего. Агрегат управления имеет двухкаскадный электрогидроусилитель. Первый каскад - гидроусилитель типа «сопло - заслонка» - выполнен по схеме гидравлического моста. В качестве постоянных сопротивлений, равных между собой, применены дроссели 4. Переменными гидравлическими сопротивлениями являются сопла 3 с заслонкой (якорем) 2 преобразователя сигналов.
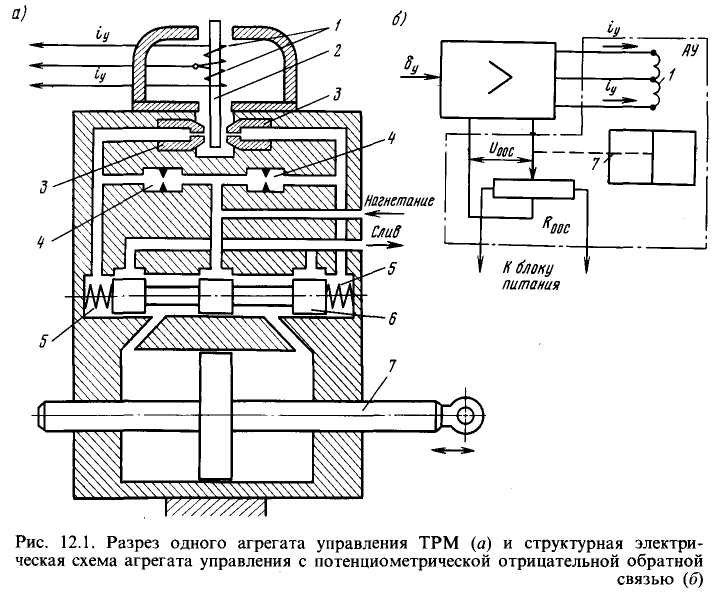
Входным параметром первого каскада усиления служит ток управления электронного усилителя, выходным параметром - перепад давлений на торцах распределительного золотника 6, включенного в диагональ моста. Второй каскад усиления — золотник, выходным параметром которого является расход рабочей жидкости, определяемый открытием щели в гильзе золотниковой пары.
Принцип действия электрогидроусилителя основан на равновесии и дисбалансе гидравлического моста. При отсутствии тока в обмотках 1 управления преобразователя сигналов переменные гидросопротивления равны и мост сбалансирован. Золотник находится в нейтральном положении. При подаче тока в обмотки преобразователя сигналов заслонка (якорь) отклоняется от нейтрального положения, в результате чего изменяется сопротивление истечению жидкости из сопел, нарушается равновесие моста, возникает перепад давлений на торцах распределительного золотника. Под действием перепада давлений золотник смещается, соединяя полости цилиндра с нагнетанием и сливом. В результате этого поршень со штоком 7 смещается вправо или влево. Пружины 5 золотника обеспечивают пропорциональное перемещение его в зависимости от значения перепада давлений на торцах.
На рис. 12.1,б приведена структурная схема агрегата управления А У с потенциометрической отрицательной обратной связью. На вход усилителя поступает управляющий сигнал δУ. Шток 7 агрегата перемещает ползунок потенциометра ООС, РООС, с которого снимается сигнал UООС. Усилитель уменьшает ток управления iУ в обмотках 1 до нуля. Заслонка (якорь) приходит в нейтральное положение. Золотник также возвращается в нейтральное положение под действием пружин, а поршень останавливается в отклоненном положении.
Динамические свойства гидропривода в основном оценивают тремя факторами: коэффициентом усиления по скорости kV , постоянной времени Т и коэффициентом демпфирования кД.
Коэффициент усиления по скорости kV = kQ / AП, где kQ - коэффициент усиления золотникового гидроусилителя по расходу жидкости; АП — рабочая площадь поршня силового цилиндра.
Коэффициент усиления по расходу (приближенно):
 ,
,
где G — гидравлическая проводимость управляемого дросселя; х - перемещение золотника; рПИТ - давление в линии питания.
Из этой формулы следует, что kQ увеличивается с возрастанием давления в линии нагнетания и гидравлической проводимости. С увеличением радиального зазора и перекрытия этот коэффициент при малых смещениях золотника заметно уменьшается, что снижает крутизну нарастания расхода и чувствительность гидропривода.
Постоянная времени  , где т - масса жидкости движущихся частей и нагрузки, приведенная к оси силового цилиндра; СГ - коэффициент жесткости гидропружины.
, где т - масса жидкости движущихся частей и нагрузки, приведенная к оси силового цилиндра; СГ - коэффициент жесткости гидропружины.
С увеличением жесткости гидропружины постоянная времени уменьшается. Это улучшает динамику привода.
Коэффициент кД определяет качество переходного процесса и степень колебательности привода:
 ,
,
где β - жесткость механической характеристики гидропривода.
Из данного выражения следует, что с уменьшением жесткости β демпфирующие свойства гидропривода улучшаются.
На рис. 12.2 изображена схема электрической рулевой машины.
|
|
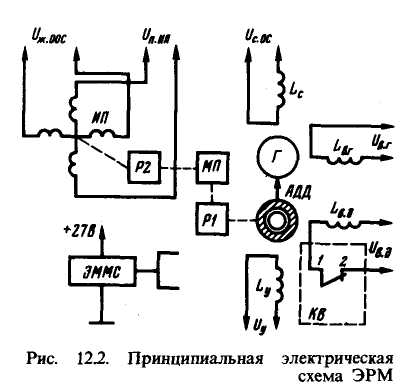
Двигатель-генератор ЭРМ представляет собой две электрические машины в одном корпусе: асинхронный двухфазный двигатель АДД с полым ротором и асинхронный тахогенератор Г. Ротор двигателя АДД тонкостенный алюминиевый стакан, вращающийся в воздушном зазоре между неподвижным статором (обмотка возбуждения LВД, управления - LУ) и внутренним магнитопроводом. Двигатель АДД преобразует электрическую энергию в механическую на выходном валу, а тахогенератор Г является датчиком скоростной ООС сервопривода. С его сигнальной обмотки LС снимается напряжение UС ос обратной связи. Другие элементы ЭРМ имеют следующие назначения: муфта пересиливания МП определяет значение момента на выходном валу ЭРМ; муфта ЭММС сцепляет вал двигателя АДД с выходным валом; концевой выключатель KB контактами 1-2 отключает обмотку возбуждения LВД двигателя АДД при отклонении выходного вала на угол более заданного. Муфта пересиливания МП, электромагнитная муфта сцепления ЭММС и KB являются элементами безопасности при работе АБСУ. Индукционный потенциометр ИП, ротор которого через редукторы Р1 и Р2 приводится во вращение от АДД, служит датчиком жесткой ООС в сервоприводе. К нему подводится напряжение питания Uп ИП, а с его сигнальной обмотки снимается напряжение Uж ООС.
Относительная угловая скорость V0 идеального XX, пусковой момент двигателя АДД и жесткость характеристик  зависят от коэффициента сигнала α=UХ/UВД. Благодаря зависимости угловой скорости идеального холостого хода V0 от коэффициента сигнала α можно управлять этой скоростью. С уменьшением коэффициента сигнала α угловая скорость идеального XX падает, так как двигатель нагружается внутренним моментом, создаваемым магнитным полем обратной последовательности. Пусковой момент прямо пропорционально зависит от коэффициента сигнала α. Жесткость же механических характеристик при изменении коэф
зависят от коэффициента сигнала α=UХ/UВД. Благодаря зависимости угловой скорости идеального холостого хода V0 от коэффициента сигнала α можно управлять этой скоростью. С уменьшением коэффициента сигнала α угловая скорость идеального XX падает, так как двигатель нагружается внутренним моментом, создаваемым магнитным полем обратной последовательности. Пусковой момент прямо пропорционально зависит от коэффициента сигнала α. Жесткость же механических характеристик при изменении коэф 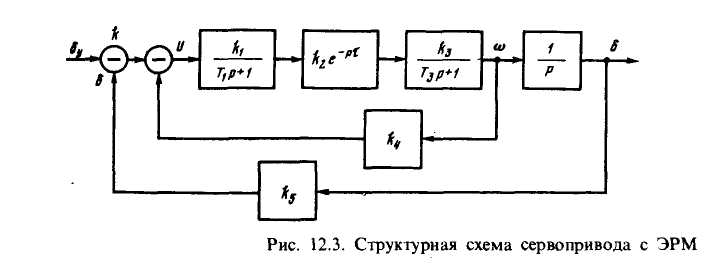 фициента сигнала меняется незначительно.
фициента сигнала меняется незначительно.
Структурная схема сервопривода с ЭРМ представлена на рис. 12.3. На схеме обозначено:
к - коэффициент пропорциональности между углом δ отклонения руля и напряжением U;
к1 к2, к3, к4, к5 - коэффициенты усиления суммирующего усилителя, электромагнитной муфты, электродвигателя, скоростной ООС и жесткой ООС;
Т1, Т3 - постоянные времени суммирующего усилителя и электродвигателя ;
К2 ·е-рτ передаточная функция электромагнитной муфты.
Передаточная функция замкнутой системы, соответствующая данной структурной схеме, имеет вид:
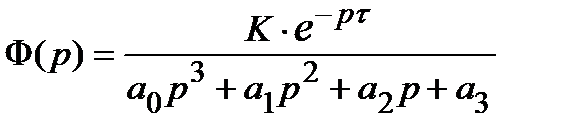 ,
,
где К=кк1к2к3; к1=к1к2к3 к4; к2=к1к2к3 к5;
а0=Т1 Т3; а1=Т1 +Т3; а2=1+ к1 ·е-рτ; а3=(К+ К2 )·е-рτ.
Условие устойчивой работы сервопривода: а1а2-а0а3>0. Из этого условия вытекает требование к значениям коэффициентов усиления и постоянных времени отдельных звеньев.
12.2. Электропривод триммеров и стабилизатора
Электроприводу триммеров приходится преодолевать аэродинамические силы, являющиеся потенциальными. Однако силы трения в механической передаче, имеющей большое передаточное отношение, превышают аэродинамические. Поэтому нагрузка на двигатель независимо от направления движения остается положительной, что позволяет использовать в электроприводе простые по схеме управления двигатели последовательного возбуждения. Электромеханизмы, отклоняющие триммеры, конструктивно обычно размещены внутри стабилизатора, киля, руля направления, элерона и соединены с триммерами с помощью тяг и качалок.
Для управления триммерами руля направления и элеронов применяют электромеханизмы МП-100МТ с поступательным ходом штока. Основными элементами такого электромеханизма являются электродвигатель 12(рис. 12.4),
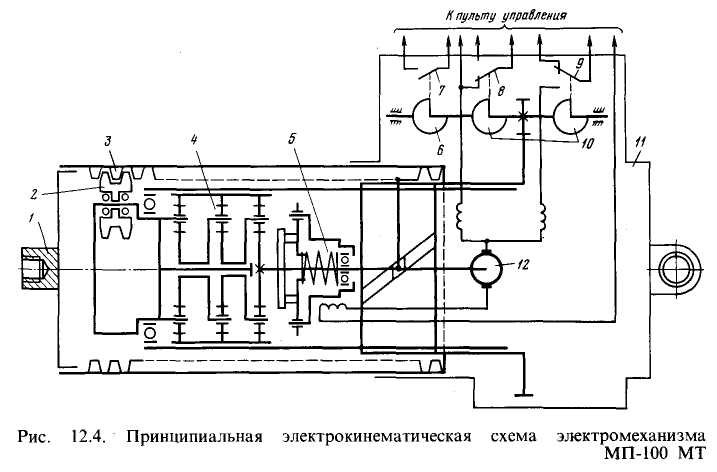
электромагнитная муфта торможения 5, планетарный редуктор 4, роликовая винтовая пара 2-3, узел концевых выключателей 7-9. При подаче питания на одну из обмоток возбуждения, якорную обмотку электродвигателя и обмотку электромагнитной муфты вал электродвигателя растормаживается и крутящий момент передается на каретку-винт 2, которая, вращаясь, сообщает поступательное движение гайке-штоку 1 в ту или иную сторону относительно неподвижного корпуса 11. Кулачковый механизм 6, 10 и концевые выключатели 7-9 обеспечивают сигнализацию нейтрального положения, отключение электродвигателя и торможение его вала в крайних положениях при выпуске и уборке.
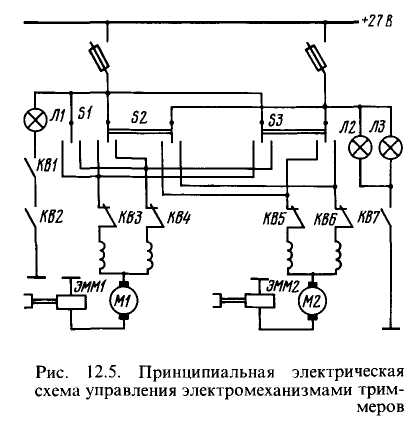
Каждый триммер элеронов отклоняется своим электромеханизмом МП-100Т. Электромеханизмы включают переключателями S 2, S3 (рис. 12.5) на пультах триммеров в кабине экипажа. Контакты концевых выключателей КВЗ-КВ6 отключают электромеханизмы в крайних положениях, а контакты выключателей КВ2 и КВ7 замыкают цепи сигнальных ламп, когда триммеры находятся в нейтральном положении. Триммеры элеронов не связаны между собой механически. Ввиду возможной разницы в скоростях движения штоков механизмов в эксплуатации могут быть случаи рассогласования в положении триммеров. Положения триммеров согласуют с помощью пульта синхронизации, на котором установлены нажимной переключатель S 1, лампа Л1 и концевой выключатель КВ1. Триммеры согласуют так:
одним из переключателей S 2 или S3 включают электромеханизм. Загорание ламп Л2 и ЛЗ свидетельствует о нейтральном положении правого триммера;
открывают крышку пульта синхронизации. При этом замкнутся контакты концевого выключателя КВ1;
переключателем SI включают электромеханизм и, отклоняя триммер, добиваются загорания лампы Л1, что будет свидетельствовать о нейтральном положении левого триммера;
закрывают крышку пульта синхронизации. При этом лампа Л1 гаснет, так как разомкнутся контакты выключателя КВ1.
Триммеры элеронов согласуют перед полетом. В полете это делать запрещено.
Триммеры руля высоты имеют механическое и электрическое управления. Оба триммера управляются одним электромеханизмом, выходной барабан которого включен в механическую передачу. Через эту передачу при работе механизма одновременно приводятся в движение штурвальчики в кабине экипажа и винтовые механизмы, отклоняющие триммеры.
Электропривод стабилизатора. Для расширения диапазона эксплатационных центровок на самолетах устанавливают управляемые стабилизаторы. Стабилизатор переставляют электрическим или гидравлическим приводом. В неподвижном положении стабилизатор фиксируется за счет самоторможения резьбы винта подъемника привода.
Схема управления электромеханизмом МУС-ЗПТВ привода стабилизатора дана на рис. 12.6. На схеме показано управление только одним двигателем электромеханизма. Управление работой другого двигателя производится по аналогичной схеме. При установке переключателя S 1 в положение «Кабрирование» напряжение 27 В подается через автомат защиты F 3 на обмотки контактора К5 и реле К6, а через автомат F 2, переключатель S 1 и замкнутые контакты концевого выключателя КВ2 на обмотку реле К4. Срабатывая, контактор К5 подготавливает цепи питания электродвигателя переменным током, а реле Кб - цепь питания электромагнитной муфты ЭММ1. Через контакты 5-6 реле К4 напряжение подается на коробку защиты двигателя КЗД, а через контакты 1-2 реле К10 и 2-3 реле К4 - на обмотку контактора К2. Он, срабатывая, подключает электродвигатель M 1 к сети переменного тока через свои контакты 1-2, 3-4, 5-6. Двигатель M 1 начинает вращаться. При наличии напряжения в сети и исправности цепей питания в. коробке КЗД срабатывают реле К7 - К9, питающиеся от трансформаторов Т1 - ТЗ через выпрямительные блоки V 1- V 4, V 5- V 8, V 9- V 12. Замкнувшиеся контакты реле К7 - К9 образуют параллельную цепь контактам 1-2 реле К10.
|
|
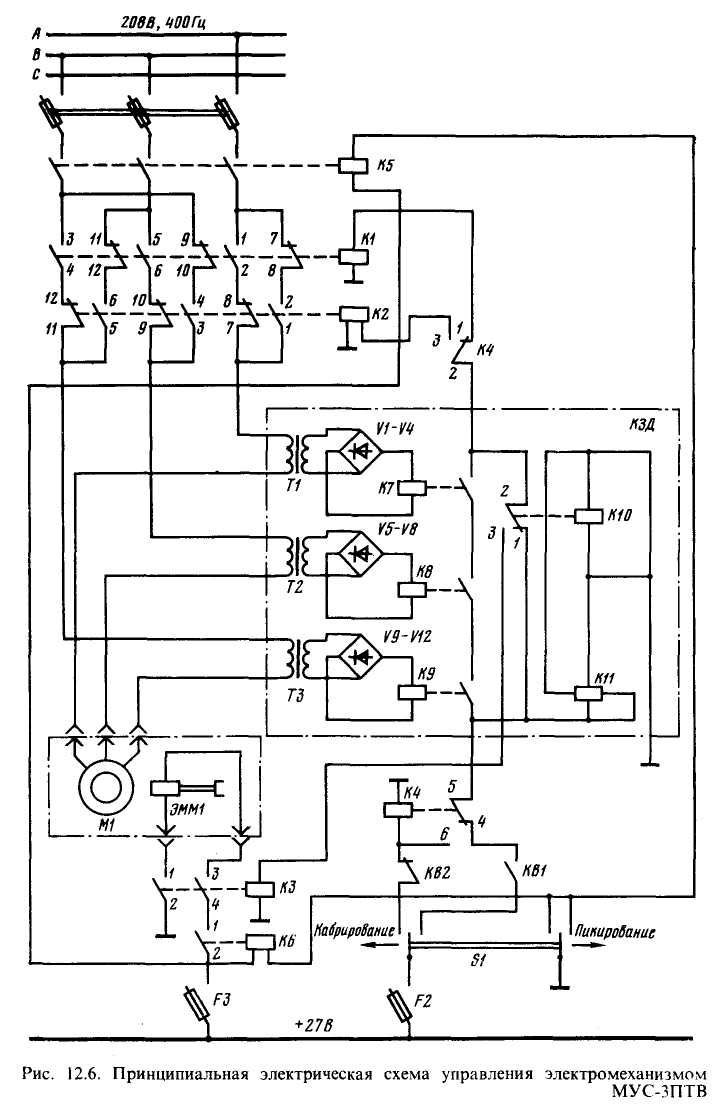
После замыкания контактов 5 - 6 реле К4 напряжение подается на реле выдержки времени К11, которое срабатывает через 0,5 с и подключает реле К10. После срабатывания этого реле напряжение 27 В подводится на реле КЗ. Оно срабатывает и подключает муфту ЭММ1. Таким образом, сцепление ротора электродвигателя с редуктором происходит через 0,5 с после начала вращения. Задержка по времени на выдачу сигнала включения муфты ЭММ1 необходима из-за того, что ротор электродвигателя не тормозится при отключении, и время его полного останова может быть больше времени перерыва при переключении на обратное направление вращения. Включение муфты через 0,5 с обеспечивает реверс ротора до сцепления его с редуктором механизма. При полном отклонении стабилизатора контакты 1 - 2 выключателя КВ2 разрывают цепь питания реле К4, коробки КЗД и контактора К2. Электродвигатель M 1 отключается от сети переменного тока, муфта ЭММ1 обесточивается и затормаживает выходной вал электромеханизма.
Установкой переключателя S 1 в положение «Пикирование» включают контактор К5 и реле К6, которые подготавливают цепи питания электродвигателя и электромагнитной муфты. Напряжение на коробку КЗД подается через автомат F 2, замкнутые контакты концевого выключателя КВ1, контакты 4 - 5 реле К4, а через контакты 1 - 2 реле К10 и 1-2 реле К4 на контактор К1. Последний срабатывает и своими контактами 1 - 2, 3 - 4, 5 - 6 подключает электродвигатель M 1 к сети переменного тока на другое направление вращения. Срабатывают реле К7-К9, а через 0,5 с - реле K 11 и К10. Затем срабатывает реле КЗ. Оно подключает электромагнитную муфту, которая обеспечивает сцепление ротора электродвигателя с редуктором. Выходной вал электромеханизма через винтовой подъемник поднимает стабилизатор. Подъем ограничивается размыканием контактов выключателя КВ1. При этом снимается питание с коробки КЗД и контактора К1. Электродвигатель отключается и электромеханизм останавливается.
С каждым из электродвигателей электромеханизма работает своя коробка защиты КЗД. Она защищает электродвигатель при обрыве фазы, а также создает выдержку времени на включение электромагнитной муфты. Защита двигателя при обрыве любой фазы происходит следующим образом. При отсутствии напряжения или обрыве одной фазы разрывается цепь, состоящая из последовательно замкнутых контактов реле К7-К9, а следовательно, снимется питание с реле КЗ и контакторов K 1 ( K 2). Электродвигатель M 1 и муфта ЭММ1 отключаются. Электродвигатель от сети переменного тока питается через размыкающиеся контакты одного контактора и замыкающиеся контакты другого. Такое соединение контактов исключает возможность КЗ при включении электродвигателя на реверс в условиях залипания контактов одного из контакторов. В случае отсутствия питания на одном из электродвигателей выходной вал электромеханизма получает вращение от исправного электродвигателя. Частота вращения выходного вала в этом случае вдвое меньше.
После проверки работоспособности триммеров их устанавливают в нейтральное положение, которое контролируют по сигнальным лампам и визуально. При необходимости триммеры синхронизируют. При техническом обслуживании проверяют надежность крепления электромеханизмов триммеров, надежность контровки штепсельных разъемов и крепление минусовых проводов. Вскрывать электромеханизмы триммеров в процессе эксплуатации не разрешается.
Управляемый стабилизатор при взлете самолета переставляется от рукоятки управления закрылками (при закрытом колпачке переключателя стабилизатора). При установке рукоятки управления закрылками из положения «0» на любой угол закрылки одновременно выпускаются на заданный угол, а стабилизатор переставляется из полетного положения «0» во взлетное положение «-3°». Если рукоятка управления закрылками переставляется из любого положения в положение «0», одновременно полностью убираются закрылки и стабилизатор устанавливается в полетное положение «0».
При техническом обслуживании осматривают подъемник стабилизатора, проверяют состояние и крепление электромеханизма и механизма концевых выключателей. Проверяют соответствие углов установки стабилизатора показаниям индикатора. В процессе отладки и испытания электропривода стабилизатора под током контролируют продолжительность перестановки стабилизатора из одного крайнего положения в другое (при этом должен соблюдаться тепловой режим работы электромеханизма). Не допускается пробуксовка фрикционной муфты, если же есть пробуксовка, то отлаживают механизм с помощью ручного привода. По окончании работы ручным приводом обязательно снять рукоятку.
12.3. Электропривод антенны радиолокатора
Антенна радиолокатора А (рис. 12.7) осуществляет азимутальное сканирование. Канал азимутального привода антенного блока состоит из АДД M 1 с обмотками 1 - 2, 3 - 4, понижающего редуктора с передаточным отношением u 1, решающего вращающегося трансформатора М2 и вращающегося трансформатора развертки МЗ (с обмотками 13 - 15, 14 - 16, 17 - 19, 18 - 20).
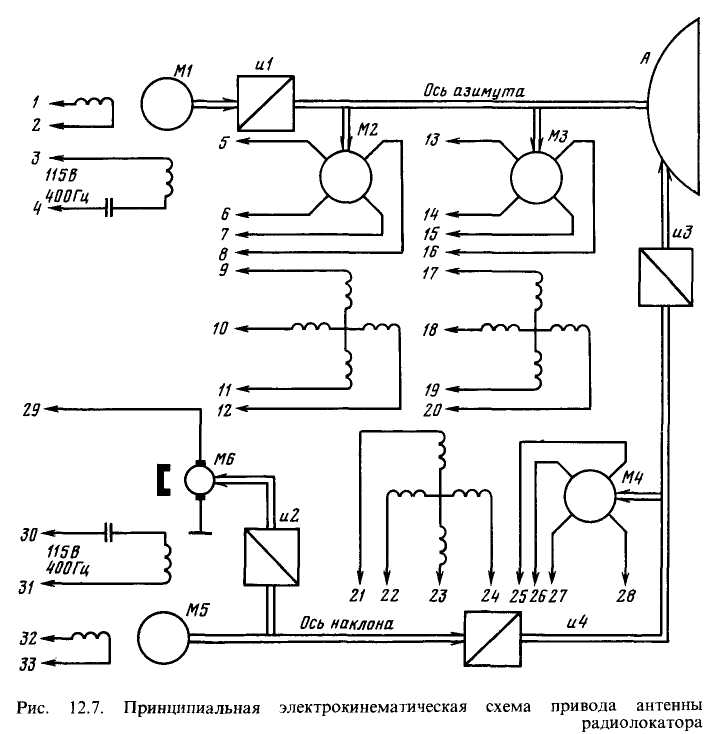
Управляемый двигатель M 1 вращается без реверса. Непрерывное вращение двигателя преобразуется в секторное качение рефлектора антенны с помощью кривошипно-коромыслового механизма. На обмотку возбуждения 3 - 4 двигателя M 1 подается напряжение 115 В, 400 Гц, а на его обмотку управления 1 – 2 - пониженное напряжение от блока стабилизации и управления. Значение этого напряжения зависит от режима работы радиолокатора. На обмотку 1 - 2 может подаваться и постоянное напряжение для торможения антенны и фиксации ее в определенном положении.
Вращающийся трансформатор М2 (с обмотками 5 - 7, 6 - 8, 9 - 11, 10 - 12) служит для получения напряжения, амплитуда которого пропорциональна мгновенному значению требуемого угла наклона луча антенны в системе косвенной его стабилизации, определяемому по формуле δ’=γ·sinα-θ·cosα , где γ , θ, α - текущие углы крена самолета, тангажа, азимутальный поворот рефлектора соответственно. Данное напряжение получают за счет напряжения крена, подаваемого на синусную обмотку трансформатора от самолетной гировертикали, а на косинусную — напряжения тангажа. Требуемый для совмещения луча с горизонтальной плоскостью угол δ наклона отражателя меньше полученного значения δ’ в постоянное число раз K А=δ’/δ, определяющее, во сколько раз угол отклонения оси диаграммы направленности антенны превышает угол поворота рефлектора относительно облучателя. Этот коэффициент учитывается введением редукции между осью наклона отражателя и вращающимся трансформатором М4 отработки наклона.
Снимаемое с роторной обмотки 6 - 8 вращающегося трансформатора М2 и пропорциональное требуемому углу δ’ напряжение поступает далее в блок стабилизации и управления, где сравнивается с напряжением, пропорциональным действительно имеющемуся в данный момент значению угла наклона отражателя, получаемому от трансформатора М4.
Канал управления отражателя антенны по наклону предназначен для непрерывного совмещения оси диаграммы направленности с плоскостью горизонта или другой заданной плоскостью при крене и тангаже самолета, а также для дистанционного задания угла наклона плоскости, с которой производится совмещение, в пределах углов ±10° относительно горизонта. Канал наклона состоит из асинхронного двухфазного электродвигателя М5 с обмотками 30 - 31, 32 - 33, редуктора с передаточным отношением иЗ, редуктора отношением и4, трансформатора М4, тахогенератора постоянного тока М6, редуктора с передаточным отношением и2. Двигатель М5 перемещает отражатель в плоскости наклона. Его вращением управляет блок стабилизации и управления изменением амплитуды и фазы подаваемого на обмотку управления 32 – 33 переменного напряжения. Трансформатор М4 с обмотками 21 - 23, 22 - 24, 25 - 27, 26 - 28 работает в качестве приемника в системе дистанционной передачи, служащей для ручного наклона плоскости стабилизации, а также является датчиком истинного текущего угла наклона рефлектора и используется в следящей системе гиростабилизации в качестве датчика отработки. Сигнал рассогласования во всех случаях поступает с его статорной обмотки в блок стабилизации и управления. Тахогенератор М6 - элемент ООС, которая нужна в следящей системе наклона отражателя для придания ей определенных динамических свойств. Напряжение с якорной обмотки тахогенератора 29 подается в магнитно-тиристорный усилитель блока стабилизации и управления. Выводы обмоток 1 - 2, 5 - 29, 32 - 33 подсоединены к блоку стабилизации и управления.
|
|
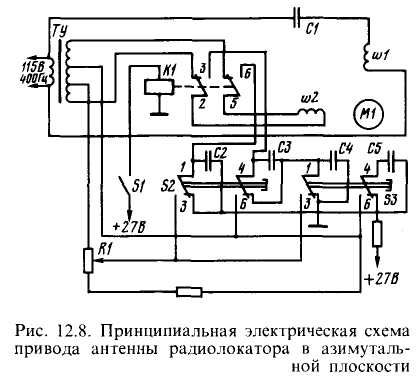
Сканирование антенны в азимутальной плоскости производится АДД M 1 (рис. 12.8), обмотка возбуждения которого w 1 питается от сети через фазосдвигающий конденсатор С1. На обмотку управления w 2 подается пониженное напряжение от трансформатора Т1 через контакты реле К1. Во всех режимах, кроме режима «Снос», реле К1 обесточено, и двигатель, получая питание, вращается непрерывно в одном направлении. Радиолокатор в режим «Снос» переводят включением переключателя S 1. При этом срабатывает реле К1 и своими контактами 2 - 3, 5 - 6 включает обмотку управления w 2 на постоянное напряжение 27 В через контакты 1 - 3, 4 - 6 кнопки S 2 и контакты 1 - 3 кнопки S3. Это обеспечивает эффективное электродинамическое торможение двигателя M 1 и надежную фиксацию антенны в заданном азимутальном положении. В таком положении измеряют угол сноса. Кнопки S 2, S3 служат для управления поворотом антенны в режиме «Снос». Скорость перемещения антенны регулируют потенциометром R 1, стоящим на оси рукоятки «Контраст». При нажатии кнопки С2 двигатель выполняет реверс из-за смены концов вторичной обмотки Т1. Конденсаторы С2 - С5 служат для искрогашения.
Схема управления наклоном рефлектора антенны представлена на рис. 12.9.
|
|
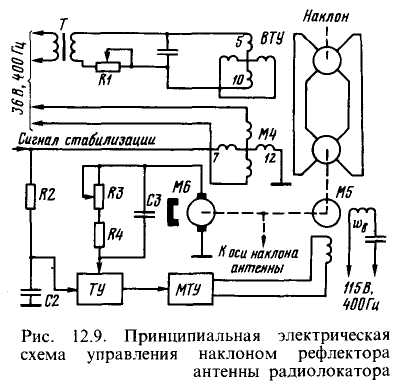
Питающее напряжение 36 В, 400 Гц через трансформатор Т подводится на статорные обмотки 5 - 10 вращающегося трансформатора управления ВТУ. На оси его ротора расположена рукоятка «Наклон». Амплитуду питающего напряжения трансформатора ВТУ регулируют потенциометром «Масштаб» R 1. Обмотки трансформатора ВТУ соединены последовательно с роторными обмотками следящего элемента М4 схемы, ротор которого приводится во вращение от двигателя М5 наклона рефлектора антенны. При несовпадении осей трансформатора ВТУ и элемента М4 в статорной обмотке 7 - 12 последнего наводится напряжение, представляющее собой ошибку рассогласования в замкнутой системе управления положением рефлектора антенны. Напряжение ошибки рассогласования с цепочки R 2, С2 поступает на вход транзисторного усилителя ТУ.
После магнитно-тиристорного усилителя МТУ сигнал идет на обмотку управления W У двигателя М5. Двигатель наклона вращает рефлектор антенны до тех пор, пока оси элемента М4 и трансформатора ВТУ не совпадут, что будет характеризоваться отсутствием сигнала ошибки на входе усилителя ТУ. Реверсирование двигателя М5 производится за счет изменения фазы напряжения на обмотке W У . С осью исполнительного двигателя М5 связан ротор тахогенератора М6, напряжение с которого, пропорциональное скорости вращения двигателя наклона, вводится через цепочку R 3, R 4, СЗ в усилитель ТУ в качестве напряжения ОС. Глубину ОС устанавливают потенциометром R 3. Автоколебания рефлектора по скорости относительно положения, заданного ручкой «Наклон», исключает ООС.
Схема привода стабилизации антенны в плоскости обзора дана на рис. 12.10.
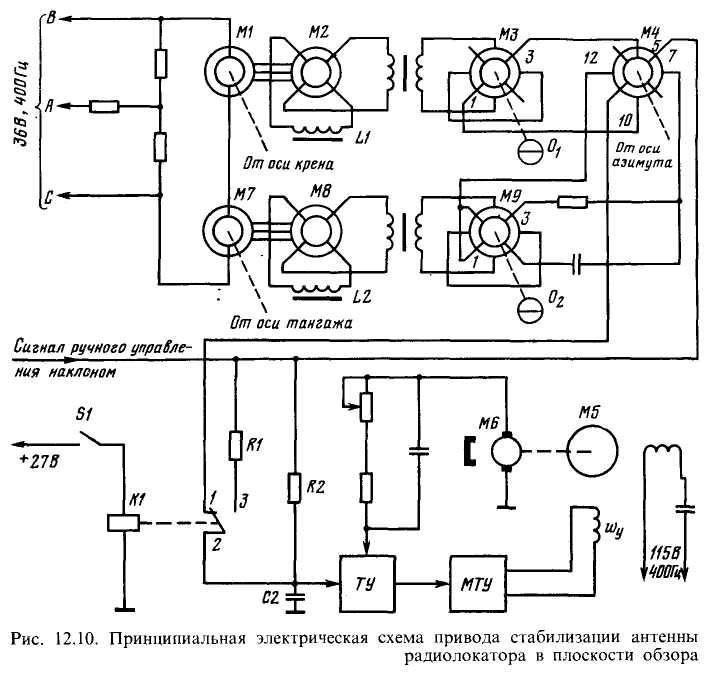
Сельсины M 1, M 7 находятся в гиродатчике, а их роторные обмотки питаются от сети 36 В, 400 Гц. Сигналы, пропорциональные углам крена и тангажа самолета, снимаются с трехфазных обмоток этих сельсинов в виде трехфазных напряжений, которые преобразуются сельсинами М2, М8 в однофазные напряжения с изменяющейся амплитудой. Для согласования преобразующего сельсина М2 ( M 8) с согласующим вращающимся трансформатором МЗ (М9) одна из роторных обмоток М2 (М8) замкнута через дроссель L 1 ( L 2). Трансформаторы МЗ, М9 определяют масштаб и фазу выходного напряжения. Сигнал, пропорциональный крену самолета, поступает на вход трансформатора МЗ, работающего в режиме масштабного трансформатора. Изменение масштаба сигнала крена равно 0-1. Сигнал, пропорциональный тангажу, поступает на вход трансформатора М9, выполняющего роль фазовращателя. Настраивают схему разворотом роторов трансформаторов МЗ, М9 с помощью самотормозящихся осей О1 О2 со шлицами. Включение согласующих вращающихся трансформаторов позволяет устранить разницу в масштабе и фазе сигналов, идущих от самолетной гировертикали.
С роторных обмоток 1 - 3 трансформаторов МЗ, М9 сигналы, пропорциональные углам крена γ и тангажа θ, следуют в статорные обмотки 5 - 10, 7 - 12 решающего вращающегося трансформатора М4. В его роторной обмотке наводятся составляющие (1/К)γsinα и
-(1/К)θsinα, так как его ротор с коэффициентом редукции 1/КА связан с осью азимутального сканирования антенны. Выходное напряжение трансформатора М4 через контакты 1 - 2 реле К1 поступает на суммирующую цепочку R 2, С2, стоящую на входе транзисторного усилителя ТУ. После магнитно-тиристорного усилителя МТУ напряжение, пропорциональное входному сигналу, подается на обмотку управления иу двигателя М5, который отклоняет рефлектор антенны на заданный угол. Таким образом, плоскость обзора стабилизируется наклоном рефлектора при изменении угла крена и тангажа самолета. Сигнал ручного управления наклоном рефлектора используют для задания нужной плоскости стабилизации луча.
В схеме предусмотрена возможность отключения стабилизации (это необходимо, например, при взлете самолета или при неисправности гиродатчика) с помощью выключателя «Резервная стабилизация» S 1. При срабатывании реле К1 вместо сигнала стабилизации на вход усилителя ТУ подключается эквивалент нагрузки R 1. При этом работа схемы управления наклоном рефлектора не нарушается. Двигатель М5 реверсируется при изменении фазы управляющего сигнала.
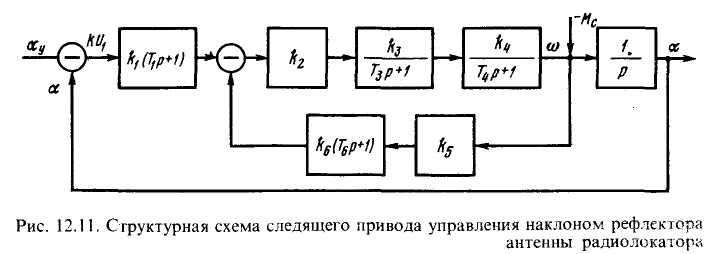
Структурная схема (рис. 12.11), соответствующая принципиальной схеме, представленной на рис. 12.9. позволяет оценить точность и устойчивость работы следящего привода наклона рефлектора антенны. На ней обозначено: αу - заданное положение оси наклона рефлектора антенны; α - действительное положение оси наклона антенны; к - коэффициент пропорциональности между углом рассогласования ∆α и напряжением, снимаемым с обмотки 7 - 12 элемента М4; U1 - напряжение рассогласования, определяемое по формуле U1=к(ау-α); k 1 , Т1 - коэффициент усиления и постоянная времени дифференцирующего контура; к2 - коэффициент усиления транзисторного усилителя; к3, Т3 - коэффициент усиления и постоянная времени магнитно-тиристорного усилителя МТУ; к4, Т4 - коэффициент усиления и постоянная времени электродвигателя (Т4 = J/β где J — момент инерции вращающихся частей, приведенный к валу двигателя; β - жесткость механической характеристики двигателя; МС - нагрузочный момент на валу двигателя; к5 - коэффициент усиления тахогенератора; к6, Т6 - коэффициент усиления и постоянная времени дифференцирующего контура в цепи обратной связи.
Передаточная функция разомкнутой системы имеет вид:
 .
.
Зависимость угла наклона рефлектора антенны от действия возмущения записывают следующим образом:
α=(ау-а) W (р) - Мс (1/р). (12.3)
При ау=0 привод является астатической системой по отношению к управляющему воздействию, а статическая ошибка х от действия возмущения МС определится из выражения (12.3) при ау=0, ау=-х находят по такому уравнению: х= M С /(kk 1 k 2 k 3 k 4). Из этого уравнения видно, что для повышения точности работы привода следует увеличивать коэффициенты усиления к, к2, к3, но при этом нельзя допускать выход привода на неустойчивый режим.
Передаточная функция замкнутой системы
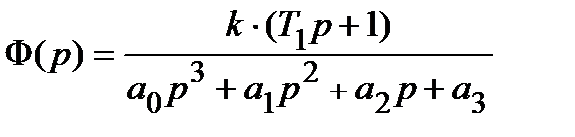 ,
,
где К= k ; к1; к2; к3; к4; К1= к2 ,к3, к4, к5,к6;
а0 = Т3 Т4; a 1 = T3 + T4+ Т6К1; а2 = Т1К + К1 + 1; а3 = К.
Для системы третьего порядка условием устойчивости является
а1а2 - а0а3 > 0 или (T3 + T4+ Т6К1)( Т1К + К1 + 1) > Т3Т4К.
Из данного неравенства следует, что для повышения устойчивости работы
привода необходимо снижать значения к, к1 Т3, Т4 и увеличивать значения k5, к6, Т1. Уменьшение Т4=J/β в приводах достигают уменьшением J (тонкостенный алюминиевый стакан в АДД и повышением жесткости β механической характеристики двигателя.
12.4. Электропривод подъемно-транспортных устройств
Для подъема транспортируемых грузов и перемещения их внутри ЛА, поднятия и опускания клетки кухонного лифта, подъема и спуска грузов при зависании вертолета в воздухе применяют электропривод подъемно-транспортных устройств. Его снабжают стационарными или переносными пультами управления, питаться он может от аэродромных источников энергии и от сети ЛА. Регулируют угловую скорость выходного вала электропривода (тросонесущего барабана лебедки) плавно (от 0 до ωMAX, например лебедка БЛ, выполненная по системе Г-Д с ЭМУ) и ступенчато (двухдвигательная лебедка ЛПГ или однодвигательная лебедка ГЛ с двухступенчатым редуктором). В двухдвигательной лебедке уменьшают скорость вращения вдвое отключением одного из электродвигателей. Общим для всех электромеханизмов лебедок является наличие фрикционной электромагнитной муфты, которая при отключении электродвигателя фиксирует тросовый барабан.
На вертолетах чаще устанавливают лебедки с приводом от двух электродвигателей. Схема управления лебедкой с двумя электродвигателями постоянного тока представлена на рис. 12.12.
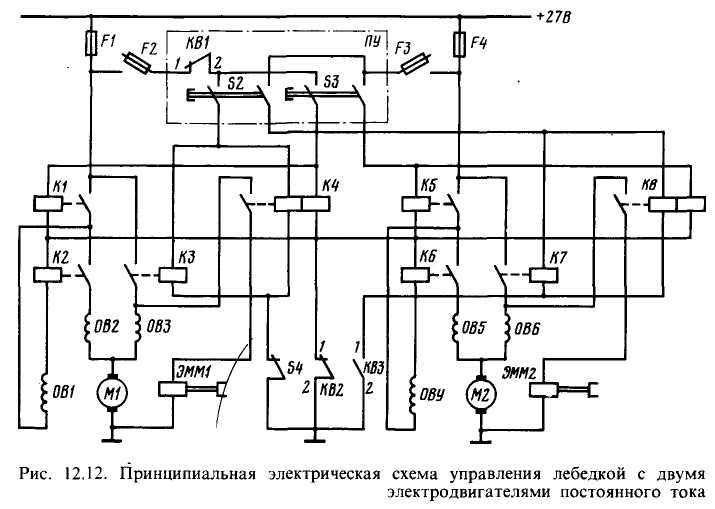
При нажатии на кнопку «Выпуск» S3 на пульте управления напряжение бортсети прикладывается к обмоткам контакторов К1, К4, К5, К8. После их срабатывания питание получают обмотки параллельного возбуждения OB 1, OB 4, а также контакторы К2, К6, подключающие обмотки последовательного возбуждения ОВ2, ОВ5 и якорные цепи электродвигателей M 1, M 2. Их роторы начинают вращаться. Электромагнитные муфты ЭММ1, ЭММ2 обеспечивают сцепление электродвигателей с редуктором. Тросонесущий барабан тоже начинает вращаться, трос выпускается. При выпуске троса электродвигателя работают по схеме смешанного возбуждения. Если кнопка S3 не отпущена, лебедка остановится при остатке 2-4 витков троса на барабане. В этот момент размыкается концевой выключатель КВ2 выпуска, а концевой выключатель КВЗ замыкается, и электродвигатель останавливается.
При нажатии на кнопку «Уборка» S 2 срабатывают контакторы КЗ, К4, К7, К8, которые включают электродвигатели на противоположное направление вращения по схеме последовательного возбуждения. Тросонесущий барабан начинает наматывать трос. Когда выпущенного троса останется 10 м, концевой выключатель КВЗ размыкает цепь, отключая второй двигатель. Первый двигатель лебедки при дальнейшей уборке троса отключают в нужный момент отпусканием кнопки S 2. Электродвигатель Ml при уборке троса можно останавливать и размыканием выключателя S 4. Лебедка имеет две скорости выпуска (уборки) троса. Для уменьшения скорости выпуска (уборки) нажимают на рычаг переключения скорости на пульте управления. При этом размыкается концевой выключатель КВ1, первый двигатель отключается, а второй перемещает трос со скоростью, вдвое меньшей.
Приведенный на рис. 12.13 фрагмент схемы электропривода лебедки с двумя асинхронными двигателями относится к одному двигателю.
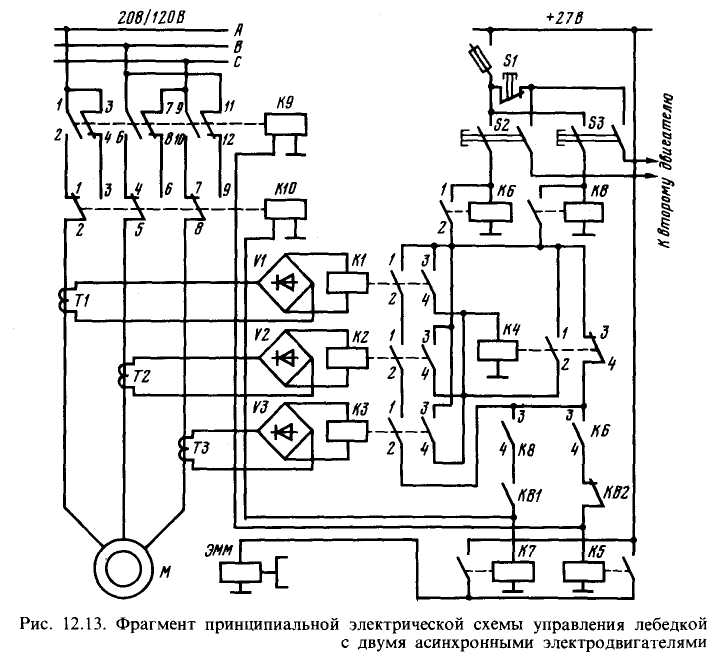
Для включения лебедки на выпуск троса нажимают кнопку «Выпуск» S 2. При этом срабатывает реле К6 и через свои контакты 1-2, контакты 3-4 реле К4, контакты концевого выключателя КВ2 включает контактор К9, который контактами 1-2, 5-6, 9-10 подключает электродвигатель М на выпуск троса. Одновременно срабатывает реле К5, подключающее электромагнитную муфту ЭММ. Лебедка производит выпуск троса. Электродвигатель останавливается при размыкании концевого выключателя КВ2, разрывающего цепь питания контактора К9 и реле К5
Схема управления лебедкой имеет защиту от КЗ в фазах до места включения трансформаторов тока и от обрывов фаз. Реле К1-КЗ через выпрямители VI - V 3 подключены ко вторичным обмоткам трансформаторов тока Т1 - ТЗ. При протекании тока по фазам электродвигателя во вторичных обмотках трансформаторов Т1 - ТЗ индукцируются э. д. с, которые обеспечивают срабатывание реле К1 - КЗ. Замыкание контактов 3 - 4 этих реле приводит к срабатыванию реле К4. Оно становится на самоподпитку через свои контакты 1-2. Контакты 3-4 реле К4 размыкаются, но обмотки реле К5 и контактора К9 остаются включенными, так как питание к ним теперь поступает через контакты 1-2 реле К1 - КЗ. Отпускание контактов одного из этих реле при возникновении аварийного режима в одной из фаз приводит к отключению реле К5 и контактора К9. При этом электродвигатель М отключается от сети и тормозится электромагнитной муфтой. Но так как механизм имеет два двигателя, лебедка продолжает работать с половинной угловой скоростью.
Для уборки троса нажимают кнопку «Уборка» S3. Срабатывают реле К7, К8, контактор К10 и подключают электродвигатель М на уборку троса. Реверс электродвигателя выполняется переключением двух его фаз, что делают контакты 7-8, 11-12 контактора К9. Ступенчатое изменение угловой скорости барабана лебедки осуществляют нажатием кнопочного выключателя S 1. При этом отключается второй электродвигатель (на схеме не показан) и угловая скорость тросонесущего барабана уменьшается вдвое. Применение двухдвигательного электромеханизма и относительно простой схемы управления обеспечивает надежную работу рассмотренных лебедок.
При эксплуатации лебедок особое внимание уделяют проверке целости троса. Особенно тщательно осматривают трос после пробуксовки фрикционной электромагнитной муфты электромеханизма лебедки.
Глава 13