Рис. 3. Скреперная лебедка








Кинематическая схема двухбарабанной скреперной лебедки приведена на рис. 4. При включении лебедки вращение от вала двигателя через редуктор 1 передается главному валу 2, на котором в рабочем 9 и холостом 10 барабанах установлены солнечные шестерни 3 и 4. При включенных фрикционах (А—А, В— В) шестерни 3 и 4 вращаются по часовой стрелке, а зубчатые венцы 5 и 6 и сателлиты 7 и 8 — против. При этом планетарный редуктор превращается в простую зубчатую передачу внутреннего зацепления с паразитной шестерней.
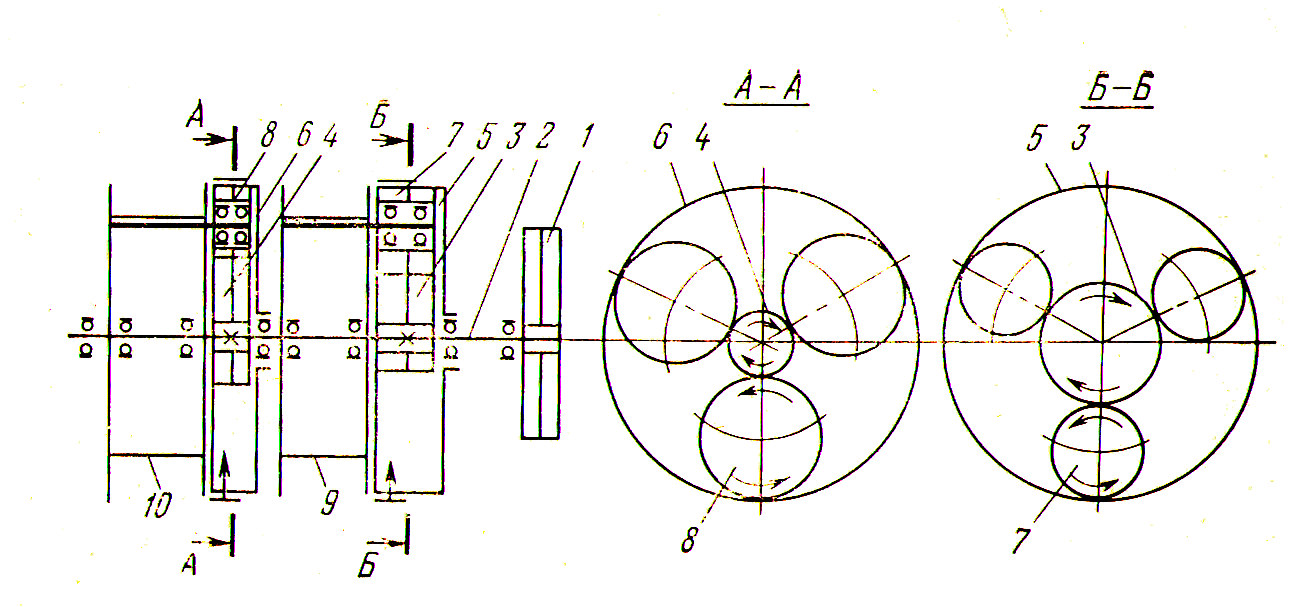
Рис. 4. Кинематическая схема двухбарабанной скреперной лебедки
Рабочий ход скрепера достигается включением фрикциона, который затормаживает зубчатый венец 5. В этом случае сателлиты 7, обкатываясь по заторможенному венцу 5 через водило, приводят в движение рабочий барабан 9, на который наматывается рабочая ветвь каната. Одновременно происходит сматывание каната с холостого барабана 10, который вращается свободно в обратном направлении. В случае затормаживания зубчатого венца холостого барабана происходит обратное движение скрепера, а канат сматывается со свободно вращающегося рабочего барабана.
Редуктор привода лебедок исполнения 2С — двухступенчатый цилиндрический. Зубчатые передачи первой и второй ступеней редуктора косозубые коррегированные. Редуктор привода лебедки исполнения 2П отличается от редуктора лебедки исполнения 2С устройством корпуса и наличием паразитной шестерни.
В целях сокращения продолжительности холостого хода скорость движения порожнего скрепера больше скорости движения груженого скрепера. Для этого блоки рабочего и холостого барабанов отличаются диаметром подшипников и числом зубьев солнечной шестерни и сателлитов, что обеспечивает повышенную скорость движения холостого каната.
Особенность работы скреперных лебедок заключается в том, что при изменении направления движения скрепера двигатель не реверсируется, а вращается непрерывно в одном направлении. Исходя из этого для скреперных лебедок целесообразно применять нерегулируемые асинхронные двигатели с короткозамкнутым ротором, которые работают постоянно включенными.
При дистанционном управлении машинист скрепера находится в месте выпуска полезного ископаемого и управляет лебедкой, наблюдая за загрузкой скрепера.
Схема скреперной установки должна обеспечить дистанционное включение барабанов и автоматическое переключение хода скрепера. Для переключения хода скрепера применяют фотоэлектрические, индуктивные, емкостные, электромеханические и другие датчики.
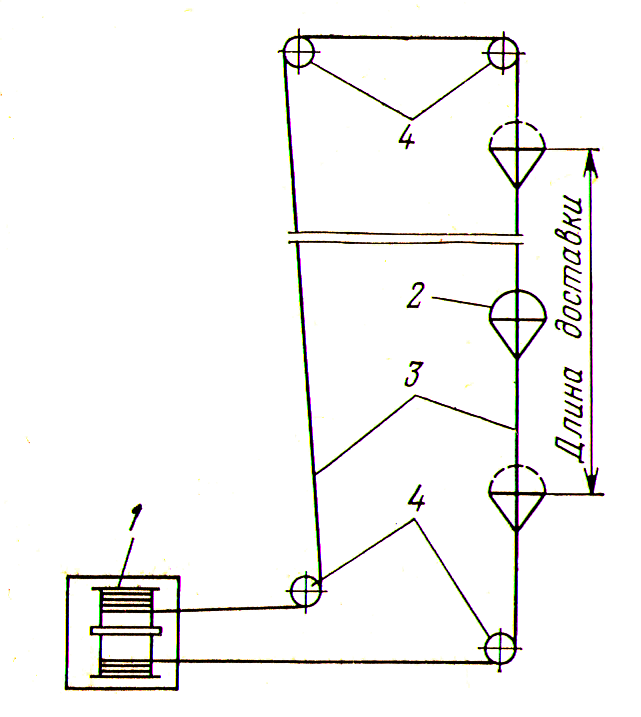
Схема подземной скреперной установки приведена на рис. 5. Она состоит из скреперной двухбарабанной лебедки 1, скрепера 2, канатов 3, направляющих роликов 4. Один конец каждого из двух канатов прикрепляется к соответствующему барабану — рабочему или холостому; другой конец одного из канатов укрепляется на передней стороне скрепера, а другой конец второго каната — на его задней стенке.
При движении скрепера открытой стороной вперед происходит зачерпывание угля и перемещение его к месту разгрузки.