
12 — кожух вентилятора; 13 — втулка вентилятора








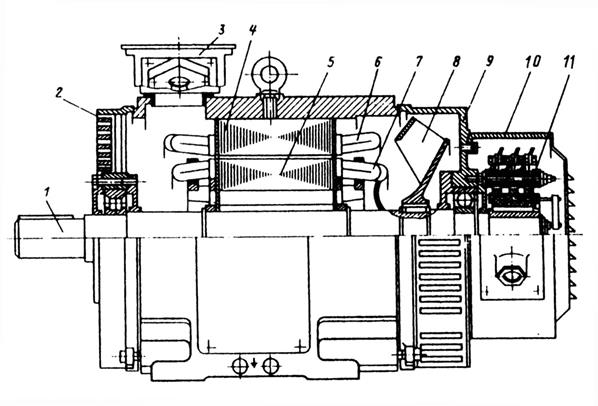
Рис. 9.15. Двигатель серии АИ с фазным ротором со степенью защиты IP23,
h =180 мм, с аксиальной вентиляцией:
1 — вал; 2,9 — подшипниковые щиты; 3 — коробка выводов; 4 — сердечник статора;
5 — сердечник ротора; 6 — лобовые части обмотки статора;
7 — лобовые части обмотки ротора; 8 — вентилятор;
10 — кожух контактных колец; 11 — контактные кольца
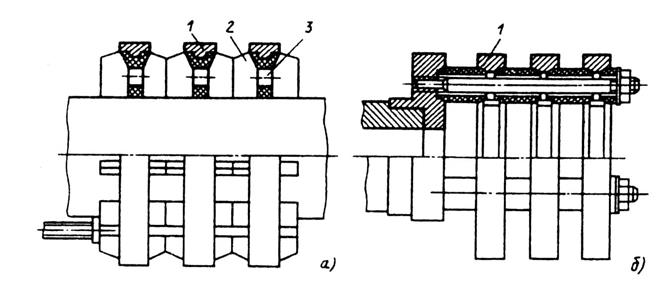
Рис. 9.16. Контактные кольца асинхронного двигателя с фазным ротором:
а — с посадкой на вал; б — консольное крепление; 1 — контактные кольца;
2 — вентиляционные лопатки; 3 — отверстия для прохода охлаждающего воздуха
Вентиляция двигателей — аксиальная. Центробежный вентилятор установлен рядом с сердечником ротора со стороны, противоположной рабочему концу вала. Охлаждающий воздух засасывается через жалюзи в подшипниковом щите, омывает лобовые части обмоток ротора и статора, наружную поверхность сердечника статора, лобовые части обмоток с другого торца сердечника и выбрасывается вентилятором через жалюзи в нижней части подшипникового щита. Часть воздуха проходит через аксиальные каналы в сердечнике статора и отводит тепло, выделяющееся в роторе.
В двигателях с h = 255...355 мм (см. рис. 9.5) вентиляция — радиальная, двусторонняя. Роторные вентиляторы расположены с двух сторон сердечника ротора. Контактные кольца укреплены на выступающем конце вала и закрыты кожухом. В двигателях с h = 280 мм их крепят консольно к несущему фланцу, установленному на валу с помощью трех шпилек (рис. 9.16, б). Токоподводы к обмотке ротора проходят через центральное отверстие в валу.
Большинство двигателей других модификаций и специализированных исполнений серии АИ выпускают со степенью защиты IP54 в тех или иных диапазонах высоты оси вращения. Они отличаются от рассмотренных либо отдельными конструктивными элементами, например, встроенным электромагнитным тормозом, либо схемами обмоток (многоскоростные двигатели), материалом заливки пазов или размерными соотношениями зубцовой зоны (двигатели с повышенным скольжением или пусковым моментом), либо усиленными уплотнениями вала, подшипниковых щитов, вводного устройства, а также защитными и лакокрасочными покрытиями и т. п. (двигатели тропического или химического исполнения).
Кроме единых серий асинхронных двигателей общего назначения выпускается ряд серий двигателей специального назначения, например крановые двигатели серии МТ, взрывозащищенные серии 2ВР и др. Асинхронные двигатели малой мощности для ручного электрифицированного инструмента, бытовой техники и специализированные для различного вида автоматических систем выпускаются электротехнической промышленностью в массовом количестве [15].
Вопросы проектирования асинхронных двигателей общего назначения рассматриваются ниже, в основном, на базе общесоюзных серий АИ и 4А.
9.4. НОВАЯ СЕРИЯ РА
Разработка новой серии асинхронных машин Российские асинхронные (РА) на Ярославском электромашиностроительном заводе (ЯЭМЗ) началась в 1992 г. Если до распада СССР созданием единых общесоюзных серий занимались около десятков НИИ и разработка единой серии занимала несколько лет, то коллективу ЯЭМЗ пришлось создавать новую серию в течение одного года [11].
В новую серию были заложены решения, позволившие изготавливать двигатели для любых требований потребителя. Это удалось создать благодаря применению конструкции станины со съемными лапами, которые фиксируются по четырем направлениям. Применение съемных лап, хотя и увеличивает трудоемкость, но позволяет несколько исполнений машины объединить в одной конструкции (фланцевое В5, на лапах ВЗ и на лапах с фланцем В35). Это приводит к значительной экономии оборотных средств завода, а потребитель может заменить поврежденную лапу новой, в то же время в конструкциях с постоянно прилитыми лапами их поломка приводит к замене всего двигателя.
В серии RA станины для высот оси вращения 71...132 мм включительно — алюминиевые, получаемые экструзией, щиты также алюминиевые (рис. 9.17). Для высот оси вращения, больших 132 мм, станины и щиты выполняют чугунными. Все станины имеют горизонтально-вертикальное оребрение, что позволяет увеличить теплоотдачу при снижении массы двигателя,
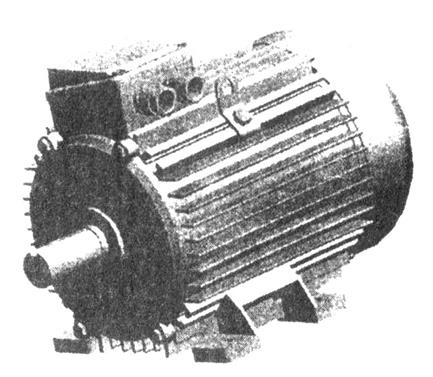
Рис. 9.17. Асинхронный двигатель новой серии РА
а также улучшает эстетичность его формы. Особенно этому способствует экструзионная станина (см. рис. 9.17).
Внутренний диаметр сердечника статора D1 выбран так, что при фиксированном наружном диаметре Dн1 оптимизирован весь ряд мощностей для нескольких высот оси вращения. Так, например, если для высот оси вращения 160 и 180 мм (Dн1 = 273 мм) при полюсности 2р = 6 выбран внутренний диаметр D1 = 185 мм, то для последующего наружного диаметра 296 мм (высота оси вращения 200 и 225 мм) сохраняется тот же внутренний диаметр 185 мм, но уже для полюсности 2р = 4. Такая унификация предусмотрена для всей серии РА (табл. 9.6).
Таблица 9.6. Унификация серии РА
| Dн1, мм | Н, мм | Мощность на валу Р2ном, кВт, при синхронной скорости | |||||||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | ||||||
| DIN | ГОСТ | DIN | ГОСТ | DIN | ГОСТ | DIN | ГОСТ | ||
| 120 | 71 | А 0,37 В 0,55 | А 0,75 В 1,1 | А 0,25 В 0,37 | А 0,55 В 0,75 | А 0,18 В 0,25 | А 0,37 В 0,55 | А 0,09 В 0,12 | А 0,25 — |
| 120 (140) | 80 | А 0,75 В 1,1 | А 1,50 В 2,2 | А 0,5 В 0,75 | А 1,1 В 1,5 | А 0,37 В 0,55 | А 0,75 В 1,1 | А 0,18 В 0,25 | А 0,37 В 0,55 |
| 140 | 90 | S 1,5 L 2,2 | — L 3,0 | S 1,1 L 1,5 | — L 2,2 | S 0,75 L 1,1 | — L l,5 | B 0,37 L 0,55 | LA 0,75 LB 1,1 |
| 150 (140) | 100 | — L 3,0 | S 4,0 L 5,5 | LA 2,2 LB 3,0 | S 3,0 L 4,0 | — L 1,5 | — L 2,2 | LA 0,75 LB 1,1 | — L 1,5 |
| 176 (206) | 112 | М 4,0 | М 7,5 | М 4,0 | М 5,5 | М 2,2 | MA 3,0 MB 4,0 | М 1,5 | МА 2,2 MB 3,0 |
| 206 | 132 | SA 5,5 SB 7,5 | — M l 1,0 | S 5,5 М 7,5 | S 7,5 M l 1,0 | S 3,0 МА 4,0 MB 5,5 | S 5,5 M 7,5 | S 2,2 М 3,0 | S 4,0 М 5,5 |
| 273 | 160 | MA 11,0 MB 15,0 L 18,5 | S 15,0 М 18,5 | M l 1,0 L 15,0 | S 15,0 L 18,5 | М 7,5 L 11,0 | S 11,0 M 15,0 | МА 4,0 MB 5,5 L 7,5 | S 7,5 M l1,0 |
| 296 (273) | 180 | М 22,0 — | S 22,0 М 30,0 | М 18,5 L 22,0 | S 22,0 М 30,0 | — L 15,0 | M 18,5 — | — L 11,0 | М 15,0 — |
| 296 | 200 | LA 30,0 LB 37,0 | М 37,0 L 45,0 | — L 30,0 | М 37,0 L 45,0 | LA 18,5 LB 22,0 | М 22,0 L 30,0 | — L 15,0 | М 18,5 L 22,0 |
| 344 (296) | 225 | — M 45,0 | — М 55,0 | S 37,0 М 45,0 | — М 55,0 | — M 30,0 | — М 37,0 | S 18,5 M 22,0 | — М 30,0 |
| 400 (344) | 250 | — M 55,0 | S 75,0 М 90,0 | — М 55,0 | S 75,0 М 90,0 | — M 37,0 | S 45,0 М 55,0 | — M 30,0 | S 37,0 М 45,0 |
| 400 | 280 | S 75,0 M 90,0 | S 110 М 132 | S 75,0 М 90.0 | S 110 М 132 | S 45,0 М 55,0 | S 75,0 М 90,0 | S 37,0 M 45,0 | S 55,0 М 75,0 |
Примечание. Буквенные обозначения в соответствии с серией 4А.
Вопросам унификации в новой серии РА уделено особое внимание, поскольку только на одной высоте оси вращения количество типоисполнений двигателей превышает несколько тысяч. Основным достоинством серии РА является возможность выпуска асинхронных двигателей, удовлетворяющих требованиям ГОСТ, DIN и SENELBC и при максимальной унификации отдельных узлов и девшей машины [11].
Внедрение профильной экструзионной станины в серии РА позволило снизить трудоемкость изготовления, повысить качество и снизить массу двигателя за счет лучшего теплосъема с поверхности станины. Экструзионные станины позволили отказаться от чистовой обработки замков статора, а также уменьшить аксиальную длину станины, так как они нарезаются из заготовки, получаемой с металлургических заводов.
Применение экструзионных станин на ЯЭМЗ ограничивалось диаметром 132 мм из-за технологических возможностей завода, но такие станины могут применяться и для больших высот, если это потребуется заказчикам.
Основной недостаток экструзионных станин — их более высокая стоимость по сравнению с литыми станинами.
В табл. 9.7 приведены основные показатели трехфазных асинхронных двигателей серии РА с короткозамкнутым ротором (степень защиты IP44, IP34, U1л ≤ 660 В).
Таблица 9.7. Показатели трехфазных асинхронных двигателей серии РА
с короткозамкнутым ротором (степень защиты IP44, IP54, U ≤ 660 В)
| Тип АД | 2р | Р2н, кВт | Вδ, Тл | A1 А/см | J1, А/мм2 | ηн, % | cos φн | Dн1 | D1 | l1 | S | Z1/Z2 |
| мм | ||||||||||||
| РА71 | 2 4 6 | 0,55 0,37 0,25 | 0,90 0,85 0,83 | 173 210 220 | 7,0 5,7 6,2 | 72,0 65,0 60,0 | 0,80 0,66 0,55 | 120 | 62 70 70 | 50 55 55 | 0,3 0,3 0,3 | 24/17 24/17 36/28 |
| РА80 | 2 4 6 | 1,1 0,75 0,55 | 0,85 0,87 0,80 | 208 225 228 | 8,2 8,0 8,3 | 75,0 73,0 67,0 | 0,87 0,70 0,66 | 120 140 140 | 62 90 95 | 75 50 55 | 0,3 0,3 0,3 | 24/17 36/28 36/28 |
| РА90 | 2 4 6 | 2,2 1,5 1,1 | 0,83 0,77 0,80 | 235 224 228 | 6,7 7,9 8,0 | 84,0 78,0 73,0 | 0,88 0,80 0,73 | 140 | 76 90 95 | 82 90 95 | 0,3 0,4 0,3 | 24/17 36/28 36/28 |
| РAIOO | 2 4 6 | 3,0 3,0 1,5 | 0,89 0,80 0,79 | 265 220 251 | 7,2 7,5 8,0 | 83,0 82,0 75,0 | 0,86 0,81 0,75 | 140 | 76 90 95 | 95 130 125 | 0,3 0,4 0,3 | 24/17 36/28 36/28 |
| РА112 | 2 4 6 | 4,0 4,0 2,2 | 0,66 0,75 0,80 | 230 260 241 | 5,8 5,0 7,2 | 83,5 86,5 79,5 | 0,88 0,84 0,79 | 206 | 117 129 145 | 90 90 70 | 0,6 0,45 0,35 | 36/28 36/28 54/44 |
| РА 132 | 2 4 6 | 7,5 7,5 5,5 | 0,68 0,87 0,83 | 215 289 279 | 5,8 5,5 8,0 | 87,0 88,5 82,0 | 0,89 0,84 0,78 | 206 | 117 129 145 | 130 145 140 | 0,6 0,45 0,35 | 36/28 36/28 54/44 |
| РА160 | 2 4 6 | 15,0 15,0 11,0 | 0,80 0,80 0,90 | 290 329 300 | 5,2 5,3 5,6 | 90,0 90,0 87,5 | 0,90 0,87 0,83 | 273 | 155 172 185 | 110 130 140 | 0,8 0,5 0,45 | 36/28 48/38 54/50 |
| РА 180 | 2 4 6 | 22,0 22,0 15,0 | 0,80 0,86 0,90 | 300 345 313 | 5,4 5,5 5,7 | 91,0 91,0 89,5 | 0,90 0,88 0,80 | 273 | 155 172 185 | 180 185 180 | 0,8 0,5 0,45 | 36/28 48/38 54/50 |
| РА200 | 2 4 6 | 37,0 30,0 22,0 | 0,73 0,81 0,77 | 344 385 350 | 4,0 4,9 5,2 | 90,5 91,5 89,0 | 0,89 0,83 0,85 | 296 | 163 185 209 | 215 200 210 | 0,9 0,55 0,45 | 36/28 48/40 72/56 |
| РА225 | 2 4 6 | 45,0 45,0 30,0 | 0,67 0,85 0,82 | 348 392 400 | 4,2 4,7 5,3 | 92,0 92,0 89,5 | 0,90 0,87 0,86 | 296 | 163 185 209 | 265 290 240 | 0,9 0,55 0,45 | 36/28 48/40 72/56 |
| РА250 | 2 4 6 | 55,0 55,0 37,0 | 0,67 0,98 0,75 | 355 362 377 | 3,8 6,1 5,7 | 93,0 92,5 90,5 | 0,92 0,88 0,85 | 344 400 344 | 190 240 240 | 240 200 240 | 1,1 0,8 0,6 | 48/40 60/50 72/56 |
Освоение серии РА позволило сократить зависимость России от импорта и развить экспорт асинхронных двигателей. Технико-экономические показатели двигателей серии РА соответствуют или превосходят лучшие аналоги зарубежных фирм, а цены на продукцию значительно ниже, чем у конкурентов.
9.5. ЗАДАНИЕ НА ПРОЕКТИРОВАНИЕ.
ВЫБОР ГЛАВНЫХ РАЗМЕРОВ И РАСЧЕТ ОБМОТКИ СТАТОРА
Техническое задание на учебное проектирование асинхронного двигателя содержит номинальные данные проектируемой машины и указания о режиме ее работы, исполнении по способу монтажа, степени защиты от воздействия окружающей среды и системе охлаждения. Кроме того, могут быть заданы также дополнительные требования к проектируемому двигателю, например наименьшие допустимые значения кратности максимального и минимального моментов, а для двигателей с короткозамкнутыми роторами также предельные значения пускового тока и наименьшие значения пусковых моментов. В отношении требований, не оговоренных в задании, спроектированная машина должна удовлетворять соответствующим ГОСТам. Методические указания к курсовому проекту см. в 1.7.
Проектирование новой машины начинают с выбора базовой модели, на которую ориентируются при проведении всех расчетов, начиная с выбора главных размеров, и при разработке конструкции отдельных узлов. За базовую обычно выбирается конструкция двигателя одной из новых серий, выпускаемых в настоящее время. Например, при проектировании асинхронных двигателей общего назначения малой и средней мощности (до 400 кВт) в качестве базовой модели следует выбирать конструкцию двигателей серии 4А или АИ и исполнения, предусмотренного в техническом задании.
В начальной стадии проектирования при выборе главных размеров и электромагнитных нагрузок необходимо учесть дополнительные требования технического задания. Если проектируемая машина должна иметь большой максимальный момент, то индуктивное сопротивление ее обмоток не должно быть большим, поэтому в такой машине нецелесообразно выбирать малое значение индукций, большую линейную нагрузку, узкие и глубокие пазы и т.п.
Требования к пусковым характеристикам с короткозамкнутым ротором следует обязательно учитывать при выборе конфигурации пазов ротора. Так, узкие и глубокие пазы с сужающейся верхней частью обеспечивают большое увеличение расчетного активного сопротивления ротора при пуске и большие пусковые моменты, но при таких пазах возрастает индуктивное сопротивление рассеяния обмотки ротора и уменьшаются перегрузочная способность двигателя и коэффициент мощности при номинальном режиме.
Полностью учесть все требования технического задания к характеристикам двигателя при выборе размеров магнитопровода и обмотки машины, не ориентируясь на данные выпущенных машин, невозможно. Поэтому перед началом расчета следует детально и изучить конструкцию базового двигателя, критически оценить принятые в ней соотношения размеров, уровни электромагнитных нагрузок и другие данные и лишь после этого приступить к расчету. Расчет асинхронных машин начинают с определения главных размеров: внутреннего диаметра статора D и расчетной длины магнитопровода lδ. Размеры D и lδ связаны с мощностью, угловой скоростью и электромагнитными нагрузками выражением машинной постоянной:
 (9.1)
(9.1)
В начале расчета двигателя все величины, входящие в (9.1), кроме синхронной угловой скорости, неизвестны. Поэтому расчет проводят, задаваясь на основании имеющихся рекомендаций значениями электромагнитных нагрузок (А и Вδ), коэффициентов (αδ, kВ и koб), и приближенно определяют расчетную мощность Р'. Остаются два неизвестных (D и lδ), однозначное определение которых без дополнительных условий невозможно. Таким условием является отношение lδ/D или более употребительное в расчетной практике отношение λ = lδ /τ. Это отношение в значительной степени определяет экономические данные машин, а также оказывает влияние на характеристики и условия охлаждения двигателей.
У большинства выпускаемых асинхронных двигателей общего назначения отношение λ, изменяется в достаточно узких пределах. Поэтому для определения D и lδ можно предварительно выбрать то или иное отношение λ, характерное для заданного исполнения и числа полюсов машины. Это позволит однозначно определить главные размеры, исходя из (9.1). Однако внутренний диаметр статора непосредственно связан определенными размерными соотношениями с внешним диаметром статора Da, в свою очередь, определяющим высоту оси вращения h, значение которой при проектировании новых двигателей может быть принято только из стандартного ряда высот, установленных ГОСТом.
Внешний диаметр статора должен также соответствовать определенным условиям, налагаемым требованиями раскроя листов электротехнической стали с наименьшими отходами при штамповке. С учетом этих требований при ручном расчете асинхронного двигателя более целесообразным является выбор главных размеров, основанный на предварительном определении высоты оси вращения, увязке этого размера с внешним диаметром статора и последующем расчете внутреннего диаметра статора D.
В связи с этим выбор главных размеров проводят в следующей последовательности.
Высоту оси вращения предварительно определяют по рис. 9.18, а или б для заданных Р2 и 2р в зависимости от исполнения двигателя.
Из ряда высот осей вращения (см. табл. П 6.2) принимают ближайшее к предварительно найденному меньшему стандартному значению Л. Следует иметь в виду, что ГОСТ определяет стандартные высоты осей вращения независимо от назначения и конструктивного исполнения асинхронных двигателей, поэтому высота оси вращения любого проектируемого двигателя должна быть равна одному из этих значений.
Зависимость (9.1) показывает, что при одной и той же длине l мощность P' изменяется пропорционально D2. Поэтому машину при выбранной высоте оси вращения выгодно выполнять с возможно большим диаметром. Максимально возможный диаметр Dа должен быть Da ≤ 2(h – h1min), где h1min — минимальное расстояние от стали сердечника статора до опорной плоскости машины (рис. 9.19), включающее толщину корпуса bкорп и расстояние от корпуса до опорной плоскости h2. Если машина выполняется со сварной станиной, то допустимое расстояние h1min уменьшается. В том случае, когда h1 >> h1min, в нижней части корпуса оребренных двигателей исполнения со степенью защиты IP44 размещают несколько охлаждающих ребер, высота которых может быть меньше, чем у расположенных на верхней и боковых частях корпуса.
Обычно расстояние h1 выбирают равным или несколько большим h1min, значения которого для двигателей с различной высотой оси вращения h приведены на рис. 9.19. При выборе Da должно быть учтено также требование использования для штамповки рулонной или листовой электротехнической стали стандартных размеров с наименьшими отходами.
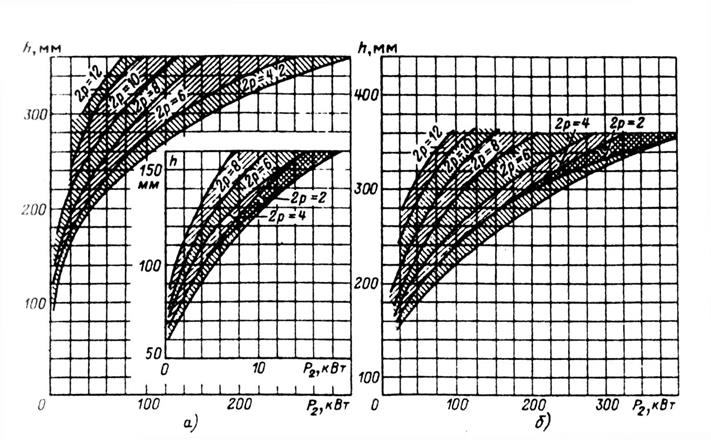
Рис. 9.18. Высота оси вращения h двигателей
различных мощности и частоты вращения:
а — со степенью защиты IP44;
б — со степенью защиты IP23
Внешние диаметры сердечников статоров двигателей серий в зависимости от высоты оси вращения при учебном проектировании могут быть приняты по данным табл. 9.8.
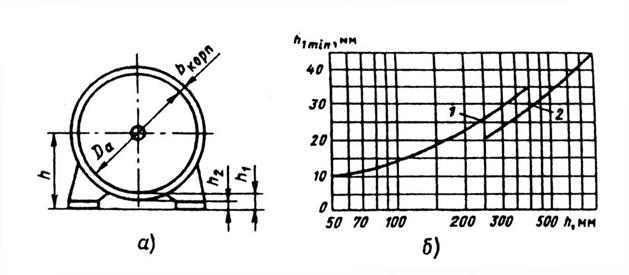
Рис. 9.19. К выбору наружного диаметра Dc статора (а).
Минимально допустимое расстояние h1 от сердечника
статора до опорной поверхности двигателя в зависимости
от высоты оси вращения двигателей со станиной (б):
1 — литой; 2 — сварной
Таблица 9.8. Внешние диаметры статоров асинхронных
двигателей различных высот оси вращения
| h, мм | 56 | 63 | 71 | 80 | 90 | |
| Da, мм | 0,08— 0,096 | 0,1—1,08 | 0,116—0,122 | 0,131—0,139 | 0,149—0,157 | |
| h, мм | 100 | 112 | 132 | 160 | 180 | |
| Da, мм | 0,168—0,175 | 0,191-0,197 | 0,225—0,233 | 0,272—0,285 | 0,313—0,322 | |
| h, мм | 200 | 225 | 250 | 280 | 315 | 255 |
| Da, мм | 0,349—0,359 | 0,392—0,406 | 0,437—0,452 | 0,52-0,53 | 0,59 | 0,66 |
Внутренний диаметр статора D в общем случае можно определить по внешнему диаметру, высотам ярма (ha) и зубцов (hz) статора:
D = Da — 2(ha + h z ).
На данном этапе расчета размеры ha и hz неизвестны. Поэтому для определения D используют эмпирические зависимости. При одном и том же уровне индукции на участках магнитопровода в машинах с одинаковым D высота ярма статора будет пропорциональна потоку, а следовательно, обратно пропорциональна числу полюсов машины (прямо пропорциональна полюсному делению). Принимая, что размеры пазов не зависят от числа полюсов машины, получаем приближенное выражение
D = KDDa. (9.2)
Значения коэффициентов КD, приведенные в табл. 9.9, характеризуют отношения внутренних и внешних диаметров сердечников статоров асинхронных двигателей серий 4А и АИ при различных числах полюсов и могут быть использованы для предварительного определения D вновь проектируемой машины.
Таблица 9.9. Отношение КD = D/Da, в асинхронных двигателях
в зависимости от числа полюсов
| 2p | 2 | 4 | 6 | 8 | 10—12 |
| КD | 0,52—0,6 | 0,62—0,68 | 0,7—0,72 | 0,72—0,75 | 0,75—0,77 |
Далее находят полюсное деление τ, м:
τ = πD/2p (9.3)
и расчетную мощность Р, В • А:
P ' = mIE = P 2  (9.4)
(9.4)
где Р2 — мощность на валу двигателя, Вт; kE — отношение ЭДС обмотки статора к номинальному напряжению, которое может быть приближенно определено по рис. 9.20.
Предварительные значения η и cos φ, если они не указаны в задании на проектирование, находятся по ГОСТу. Приближенные значения η и cos φ могут быть приняты по кривым рис. 9.21.
Предварительный выбор электромагнитных нагрузок А, А/м, и Bδ, Тл, должен быть проведен
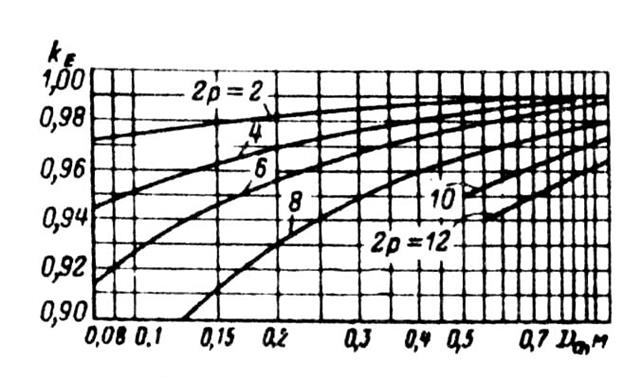
Рис. 9.20. Значения коэффициента KE
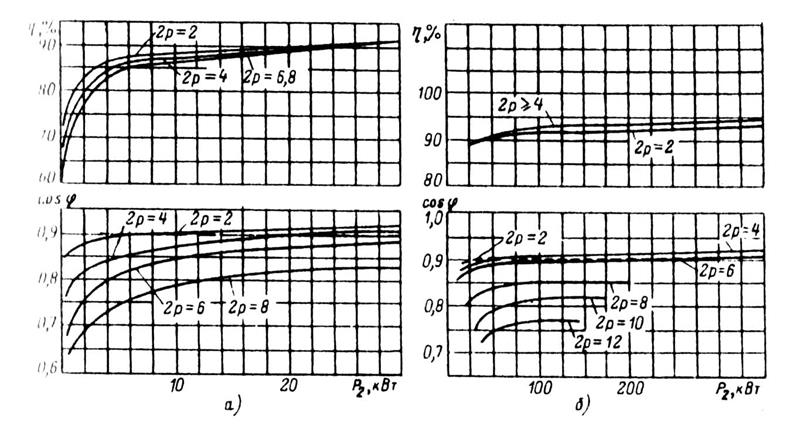
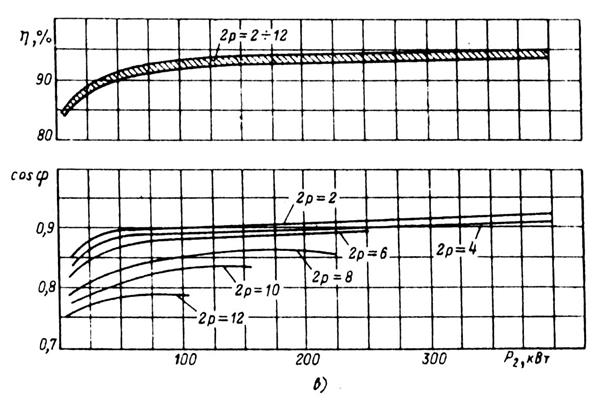
Рис. 9.21. Примерные значения КПД и cos φ асинхронных двигателей:
а — со степенью защиты IP44 и мощностью до 30 кВт;
б — со степенью защиты IP44 и мощностью до 400 кВт;
в — со степенью защиты IP23
особо тщательно, так как они определяют не только расчетную длину сердечника, но и в значительной степени характеристики машины. При этом если главные размеры машины зависят от произведения АВδ [см. (9.1)], то на характеристики двигателя оказывает существенное влияние также и соотношение между этими величинами. Рекомендации по выбору А и Вδ представлены в виде кривых на рис. 9.22—9.24 для машин различных мощности и исполнения. На каждом из рисунков даются области их допустимых значений. При выборе конкретных значений А и Вδ в пределах рекомендуемой области следует, руководствуясь приведенными выше замечаниями, учитывать требования технического задания к хактеристикам проектируемого двигателя.
Коэффициент полюсного перекрытия αδ и коэффициент формы поля kВ в асинхронных машинах определяются степенью уплощения кривой поля в зазоре, возникающей при насыщении зубцов статора и ротора, и могут быть достаточно достоверно определены топь ко после расчета магнитной цепи. Поэтому для расчета магнитной цепи удобнее рассматривать синусоидальное поле, а влияние уплощения учесть при расчете магнитного напряжения отдельных участков магнитной цепи.
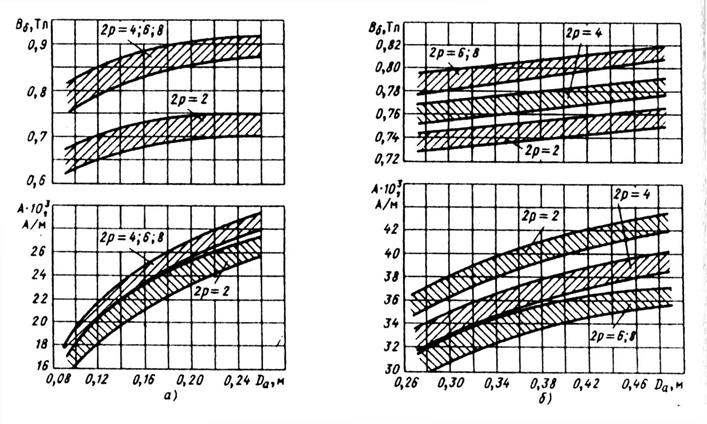
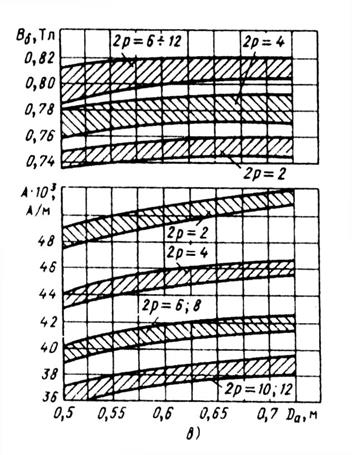
Рис. 9.22. Электромагнитные нагрузки асинхронных двигателей
со степенью защиты IP44 при высоте оси вращения:
а – h ≥ 132 мм; б – h = 150…250 мм;
в – h ≥ 280 мм (с продуваемым ротором)
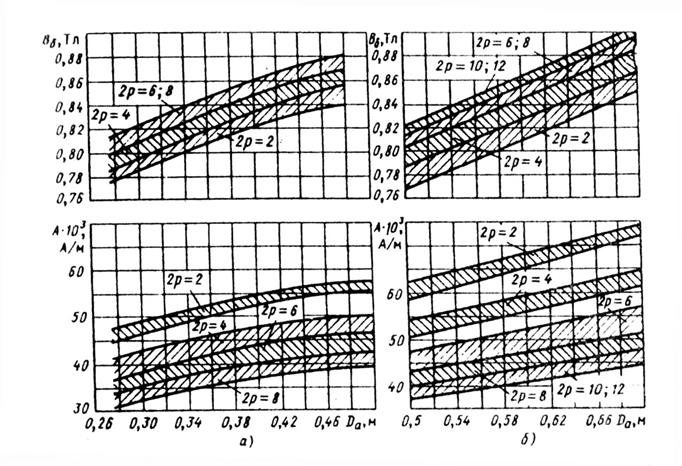
Рис. 9.23. Электромагнитные нагрузки асинхронных двигателей
со степенью защиты IP23 при высоте оси вращения:
а – h = 160…250 мм; б – h ≥ 280 мм;
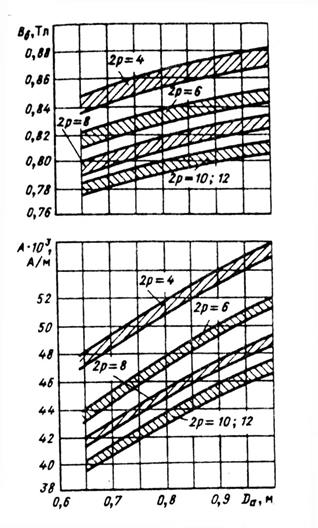
Рис. 9.24. Электромагнитные нагрузки асинхронных
двигателей высокого напряжения со степенью защиты IP23
Основываясь на этом, значения коэффициентов предварительно принимают равными:
αδ = 2/π ≈ 0,64; kВ = π/(2  ) = 1,11.
) = 1,11.
Предварительное значение обмоточного коэффициента k0e\ выбирают в зависимости от типа обмотки статора. Для однослойных обмоток koб1 = 0,95...0,96. Для двухслойных и одно-двухслойных обмоток при 2р = 2 следует принимать koб1 = 0,90... 0,91 и при большей полюсности koб1 = 0,91. ..0,92.
Синхронная угловая частота двигателя Ω, рад/с, рассчитывается по формуле
Ω = 2π  или Ω = 2π
или Ω = 2π  (9.5)
(9.5)
где n1 — синхронная частота вращения, об/мин; f1 — частота питания, Гц.
Из (9.1), с учетом значения αδ , расчетная длина магнитопровода, м,
 . (9.6)
. (9.6)
Критерием правильности выбора главных размеров D и lδ служит отношение λ = lδ /τ, которое обычно находится в пределах, показанных на рис. 9.25 для принятого исполнения машины. Если λ оказывается чрезмерно большим, то следует повторить расчет для ближайшей из стандартного рада большей высоты оси вращения А. Если К слишком мало, то расчет повторяют для следующей в стандартном раду меньшей высоты h.
На этом выбор главных размеров заканчивается. В результате проделанных вычислений получены значения высоты оси вращения h, внутреннего диаметра статора D, внешнего диаметра статора Dа, расчетной длины магнитопровода lδ и полюсного деления τ.
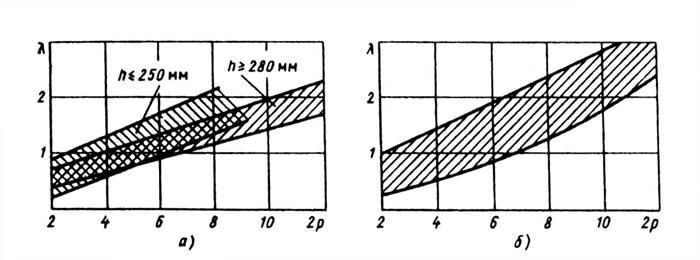
Рис. 9.25. Отношение λ = lδ /τ у двигателей исполнения
по степени защиты:
а – IP44; б – IP23
Для расчета магнитной цепи помимо lδ необходимо определить ценностью конструктивную длину и длину стали сердечников статора (l1 и lст1) и ротора (l2 и lст2). В асинхронных двигателях, длина сердечников которых не превышает 250. ..300 мм, радиальные вентиляционные каналы не делают. Сердечники шихтуются в один пакет. Для такой конструкции
l 1 = l ст1 = lδ. (9.7)
В более длинных машинах сердечники подразделяют на отдельные пакеты, разделенные между собой радиальными вентиляционными каналами. В двигателях с фазными роторами или со сварной короткозамкнутой обмоткой пакеты выполняют длиной 40...60 мм. Крайние пакеты могут быть более длинными. В двигателях с литой короткозамкнутой обмоткой ротора число пакетов по технологическим соображениям из-за сложности заливки уменьшают и пакеты выполняют более длинными.
Стандартная ширина радиального воздушного канала между пакетами bk = 10 мм. Число пакетов nпак и их длина lпак связаны с расчетной длиной следующим соотношением:
n пак = l ст / l пак ≈ lδ / l пак = целое число, (9.8)
при этом число радиальных каналов nк = nпак - 1.
Длина стали сердечника статора в таких машинах
l ст1 = l пак n пак, (9.9)
или при пакетах разной длины
l ст1 =  (9.10)
(9.10)
Конструктивная длина сердечника статора
l 1 = l ст1 + b к n к. (9.11)
Окончательное значение lδ для машин с δ < 1,5 мм
lδ ≈ l ст1. (9.12)
В машинах с δ ≥ 1,5 мм при расчете lδ учитывают искривление магнитных силовых линий потока в воздушном зазоре над радиальными вентиляционными каналами (см. § 4.2):
lδ ≈ l 1 - b 'к n к, (9.13)
где b'к — расчетная ширина радиальных каналов, зависящая от соотношения δ и δк. Значение b'к при bк = 10 мм определяется по табл. 9.10 либо из выражения
b 'к = γ'δ (9.14)
Таблица 9.10. Расчетная ширина радиальных каналов ft; при Ь* = 10 мм
| δ, мм | 1,5 | 1,6 | 1,7 | 1,8 | 1,9 | 2,0 | 2,5 | 3,0 |
| b'к, мм | 7,3 | 7,1 | 7,0 _ | 6,9 | 6,8 | 6,7 | 6,2 | 5,7 |
где
Конструктивную длину сердечника ротора в машинах с h < 250 мм берут равной длине сердечника статора, т. е. l2 = l1. В двигателях больших габаритов ротор выполняют длиннее статора за счет увеличения длины его крайних пакетов на 5 мм и в крупных машинах высокого напряжения — на 10 мм.
Длина стали сердечника ротора
l ст2 =  = l 2 – n к b к (9.15)
= l 2 – n к b к (9.15)
Следующий этап расчета включает определение числа пазов статора Z1 и числа витков в фазе обмотки статора w1. При этом число витков фазы обмотки статора должно быть таким, чтобы линейная нагрузка двигателя и индукция в воздушном зазоре как можно более близко совпадали с их значениями, принятыми предварительно при выборе главных размеров, а число пазов статора обеспечивало достаточно равномерное распределение катушек обмотки.
Чтобы выполнить эти условия, вначале выбирают предварительно зубцовое деление tz1, в зависимости от типа обмотки, номинального напряжения и полюсного деления машины. Для более равномерного распределения катушек обмотки по длине окружности зазора необходимо большое число пазов, а следовательно, маленькие зубцовые деления. В то же время ширина паза, составляющая примерно половину зубцового деления, не должна быть слишком малой, так как в этом случае ухудшается заполнение паза медью обмотки, а в машинах небольшой мощности может также недопустимо уменьшиться механическая прочность зубцов. Кроме того, надо иметь в виду, что стоимость машины с увеличением числа пазов возрастает, так как увеличиваются сложность штампа и трудоемкость изготовления и укладки обмоток.
Значения зубцовых делений статора асинхронных двигателей с обмоткой из круглого провода, необходимые для предварительного выбора числа пазов, приведены на рис. 9.26. Меньшие значения в каждой из показанных на рисунке областей возможных значений tz1 характерны для машин меньшей мощности для каждого из диапазонов высот осей вращения. Следует отметить, что двигатели с h ≥ 280 мм обычно выполняют с обмоткой из прямоугольного провода, но в многополюсном исполнении при 2р ≥ 10 (в двигателях с h = 280 и 315 мм) из-за малой высоты спинки статора размещение лобовых частей катушек из прямоугольного провода затруднено, поэтому такие машины выполняют с намоткой из круглого провода, имеющей мягкие, легко поддающиеся формовке лобовые части.
Для машин с обмоткой из прямоугольного провода при Uном ≤ 660 В и в высоковольтных машинах tz1 зависит от мощности и номинального напряжения и может быть взято в соответствии с данными табл. 9.11. В процессе расчета целесообразно не ограничиваться выбором какого-либо одного конкретного зубцового деления, а, руководствуясь приведенными выше соображениями, рассмотреть диапазон возможных значений tz1 в пределах указанных
значений зубцовых делений tz1min...tz2max. Тогда возможность числа пазов статора, соответствующих выбранному диапазону tz1,
 (9.16)
(9.16)
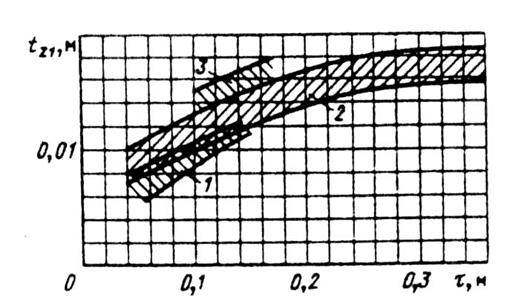
Рис. 9.26. Зубцовые деления статоров асинхронных
двигателей с обмоткой из круглого провода
с высотами оси вращения:
1 — h < 90 мм;
2 — 90 < h < 250 мм; 3 — h < 280 мм
Таблица9.11. Зубцовое деление статора fzi, м, при прямоугольных пазах
| Полюсное деление τ, м | Напряжение, В | ||
| до 660 | 3000 | 6000 | |
| Менее 0,15 | 0,016—0,02 | 0,022—0,025 | 0,024—0,03 |
| 0,15—0,4 | 0,017—0,022 | 0,024—0,027 | 0,026—0,024 |
| Более 0,4 | 0,02—0,028 | 0,026—0,032 | 0,028—0,038 |
Окончательное число пазов статора Z1 следует выбирать в полученных пределах с учетом условий, налагаемых требованиями симметрии обмотки, и желательного для проектируемой машины значения числа пазов на полюс и фазу q1. Число пазов статора в любой обмотке асинхронных машин должно быть кратно числу фаз, а число q1 = Z1/(2pm) в большинстве асинхронных машин должно быть целым. Лишь в многополюсных асинхронных двигателях иногда выполняют такое число пазов, при котором q1 является дробным, причем большей частью со знаменателем дробности, равным двум, например q1 = 2 1/2 или 3 1/2. В отдельных случаях это правило может быть нарушено, однако необходимо иметь в виду, что обмотки с дробным q1 при сравнительно небольших числах пазов и полюсов, характерных для большинства асинхронных двигателей, приводят к некоторой асимметрии МДС. Поэтому выбор окончательного числа пазов следует проводить с четкой увязкой и контролем получаемого при этом числа q. Окончательное значение tz1 = πD/(2pmq) не должно выходить за указанные выше пределы более чем на 10 % и в любом случае для двигателей с h ≥ 56 мм не должно быть менее 6—7 мм.
При определении числа эффективных проводников в пазу uп руководствуются следующим: uп должно быть целым, а в двухслойной обмотке желательно, чтобы оно было кратным двум. Применение двухслойных обмоток с нечетным uп допускается лишь в исключительных случаях, так как это приводит к необходимости выполнять разновитковые катушки, что усложняет технологию изготовления и укладки обмотки. Поэтому полученные в расчете числа uп приходится округлять до ближайшего целого или четного числа. Чтобы это округление не было слишком грубым (что особенно заметно при малых uп), вначале определяют предварительное число эффективных проводников в пазу u'п при условии, что параллельные ветви в обмотке отсутствуют (а = 1):
u 'п = πDA / I 1ном Z 1, (9.17)
где А — принятое ранее значение линейной нагрузки, А/м: I1ном — номинальный ток обмотки статора, А:
I 1ном = Р2 / ( mU 1ном η cosφ ) (9.18)
(η и cos φ заданы или выбраны в начале расчета).
Полученное по (9.17) значение u'п не округляют до целого, а находят такое число параллельных ветвей обмотки а, при котором число эффективных проводников в пазу либо будет полностью удовлетворять отмеченным условиям, либо потребует лишь незначительного изменения:
u п = а u 'п. (9.19)
Число а при этом, естественно, может быть взято только из ряда возможных чисел параллельных ветвей для обмотки данного типа и заданного числа полюсов (см. гл. 3).
Полученное из (9.19) число округляют до ближайшего целого или четного в зависимости от типа обмотки.
Принятое на данном этапе расчета число параллельных ветвей а в дальнейшем при выборе размеров и числа элементарных проводников может быть изменено. В этом случае пропорционально изменяется также и uп
Окончательное число витков в фазе обмотки
w 1 = U п Z1/ (2am). (9.20)
Окончательное значение линейной нагрузки, А/м,
А = 2 I 1ном wi m / ( πD ). (9.21)
Оно, как правило, незначительно отличается от принятого ранее, так как его изменение определяется только отношением рассчитанного по (9.19) и принятого числа эффективных проводников в пазу uп Полученное значение А нужно сопоставить с рекомендуемым (.м.рис. 9.22— 9.24).
Схему обмотки статора выбирают в зависимости от мощности машины, ориентируясь на конструкцию и предполагаемую технологию укладки обмотки в пазы. Машины мощностью до 12.. .15 кВт в большинстве случаев имеют однослойную концентрическую обмотку из круглого провода. В машинах большей мощности обмотки выполняют двухслойными, а при механизированной укладке применяют одно-двухслойные или двухслойные концентрические обмотки, которые могут быть уложены в пазы без подъема шага. Все обмотки из прямоугольного провода выполняют только двухслойными, равнокатушечными.
Обмоточный коэффициент kоб = kp ky рассчитывают в зависимости от числа пазов на полюс и фазу q и укорочения шага обмотки β = yрасч / τ, где урaсч — расчетный шаг, определяемый по формулам, приведенным в § 3.6, в зависимости от типа обмотки.
В двухслойных обмотках асинхронных двигателей шаг выполняют в большинстве случаев с укорочением, близким к β = 0,8.
После расчета kоб1 уточняют значение потока Ф, Вб:
Ф =  (9.22)
(9.22)
и определяют индукцию в воздушном зазоре Вδ, Тл:
Вδ =  . (9.23)
. (9.23)
Если полученное значение Вδ выходит за пределы рекомендуемой области (см. рис. 9.22 — 9.24) более чем на ± 5 %, следует принять другое значение числа uп и повторить расчет.
Если линейная нагрузка и индукция в воздушном зазоре при принятом числе пазов и эффективных проводников в пазу находятся в рекомендуемых пределах, переходят к расчету сечения эффективного проводника и обмоточного провода.
Сечение эффективных проводников, м2, определяют, исходя из тока одной параллельной ветви и допустимой плотности тока в обмотке:
q эф1 = I 1ном / (а J 1 ) . (9.24)
С точки зрения повышения использования активных материалов плотность тока J1 должна быть выбрана как можно большей, но при этом возрастают потери в меди обмотки. Увеличение потерь сказывается, во-первых, на повышении температуры обмотки и, во-вторых, на КПД двигателя. В асинхронных двигателях общего назначения при принятой в них системе косвенного охлаждения влияние плотности тока на нагрев обмотки более существенно, чем на КПД. На этом основании определены качественные зависимости допустимой плотности тока в обмотках различных машин. Она повышается с уменьшением габаритов машины, с увеличением допустимого нагрева обмотки при переходе на другой, более высокий класс нагревостойкости изоляции и с повышением интенсивности охлаждения (например, в машинах защищенного исполнения по сравнению с закрытыми обдуваемыми двигателями).
Нагрев пазовой части обмотки зависит от произведения линейной нагрузки на плотность тока (AJ). Поэтому выбор допустимой плотности тока производят с учетом линейной нагрузки двигателя:
J 1 = (AJ) / A. (9.25)
Значения (AJ) для асинхронных двигателей различных исполнения и мощности приведены на рис. 9.27.
Для всыпных обмоток могут быть использованы обмоточные провода диаметром не более 1,8 мм, однако в современных двигателях для повышения надежности обмотки и упрощения ее укладки в пазы используют провода меньшего диаметра. В обмотках, предназначенных для механизированной укладки, диаметр изолированного провода обычно берут не более 1,4 мм, а при ручной укладке (двигатели с h > 160 мм) — не более 1,7 мм.
Если расчетное сечение эффективного проводника в машинах со всыпной обмоткой выше значений, соответствующих указанным диаметрам, то эффективный проводник делят на несколько элементарных. Для этого по табл. П 3.1 подбираются сечение qэл и число элементарных проводников nэл, составляющих один эффективный, таким образом, чтобы диаметр dэл элементарных проводников не выходил за указанные пределы, а их суммарная площадь сечения была близка к расчетному сечению эффективного проводника:
q эл n эл = q эф. (9.26)
В обмотках из круглого провода число элементарных проводников может быть взято до 8—10, но при большом nэл возрастают технологические трудности намотки катушек, поэтому в современных машинах стремятся уменьшить число элементарных проводников в одном эффективном до 6—8, для чего увеличивают число параллельных ветвей. В двухполюсных двигателях nэл увеличивают, поскольку число параллельных ветвей в них не может быть более двух.
При проектировании машин с обмоткой из прямоугольного провода сечение каждого проводника не должно быть взято более 17...20 мм2, так как в этом случае становится заметным возрастание потерь на вихревые токи.
Если расчетное значение qэф > 20 мм2, то прямоугольные проводники подразделяют на элементарные так, чтобы qэл ≤ 17...20 мм2.
В обмотках из прямоугольного провода, укладываемых в открытые пазы, nэл обычно не более 2. При nэл = 2 они располагаются на одном уровне по высоте паза (см. рис. 3.7). Обмотку с четырьмя элементарными проводниками (см. рис. 3.7, 6) в асинхронных двигателях применяют редко. Если обмотка выполняется из подразделенных катушек, которые укладывают в полуоткрытые пазы (см. рис. 3.6, б), то всегда образуются два элементарных проводники, так как катушки, расположенные на одной высоте в пазу, соединяются параллельно (см. § 3.2).
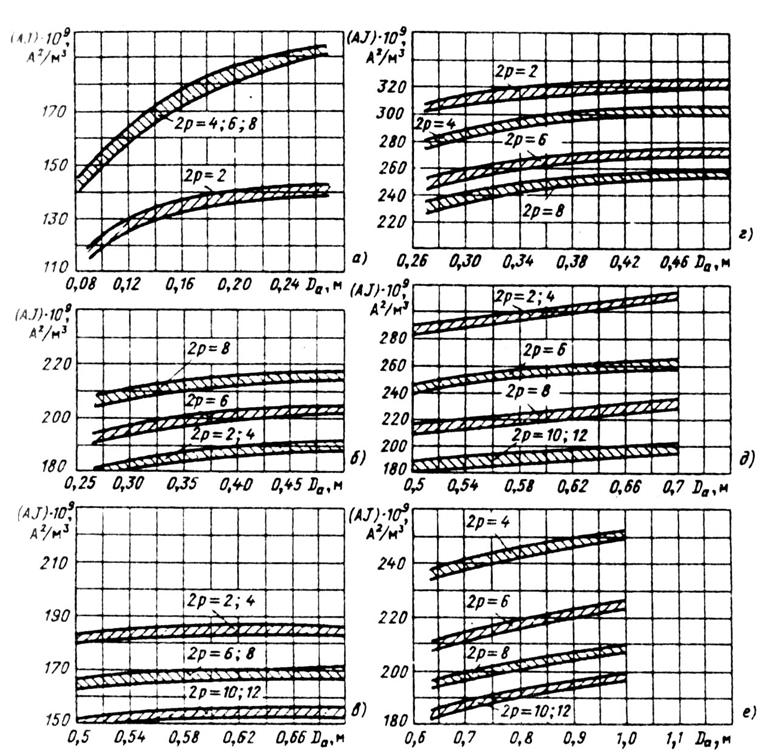
Рис. 9.27. Средние значения произведения AJ
асинхронных двигателей со степенью защиты:
а — IP44, h ≤132 мм; б — IP44, h = 160...250 мм;
в — IP44 h=280...355 мм (при продуваемом роторе);
г — IP23, h = 160...250 мм;
д — IP23, h = 280...355 мм; е — IP23, при Uном=6000 В
При прямоугольных обмоточных проводах сечение эффективного проводника не должно превышать 35...40 мм2, поэтому при большом номинальном токе в таких машинах выполняют наибольшее возможное число параллельных ветвей.
По одной и той же площади поперечного сечения прямоугольных проводников их линейные размеры а х b могут быть различны, поэтому окончательный выбор обмоточного провода производят одновременно с расчетом размеров зубцовой зоны.
После окончательного выбора qэл, nэл и а следует уточнить плотность тока в обмотке, которая может несколько измениться по сравнению с предварительно принятой при подборе сечений элементарных проводников:
J 1 = I 1ном / (а q эл n эл ). (9.27)
На этом расчет обмотки статора заканчивается. Некоторая корректировка, которая может потребоваться в ходе последующего расчета, как правило, не вносит существенных изменений в полученные данные.