
В трансверсальных фильтрах обработка сигналов происходит по алгоритму








У k =flo +«| + ... + *«
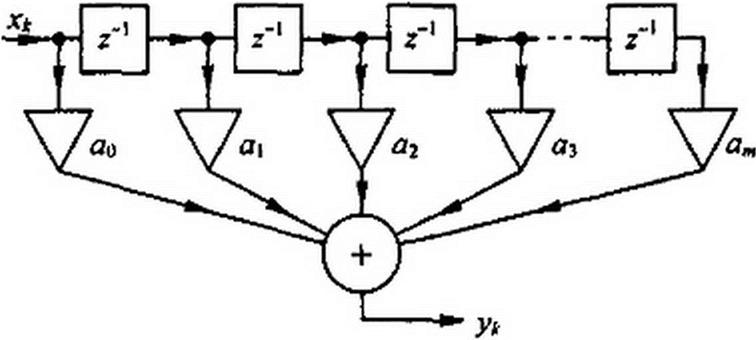
Трансверсальными их называют потому, что они содержат элементы сдвига z"', расположенные перпендикулярно (транверсально) по отношению к пути следования сигнала (рис. П8.4).
После учета запаздывания получим
 = хк («о+01 +^2 z’2+... + aw z'm).
= хк («о+01 +^2 z’2+... + aw z'm).
Передаточная функция фильтра равна отношению массива Yk к массиву Хк
КО) = -^- = ао z"‘ +а2 z~2 + — + z'm. (П8.1)
Л к
Коэффициенты а зависят от значений хЦ) в моменты дискретизации и от интервала дискретизации Т. Значения импульсной характеристики Л6(л) (т. е. набор единиц и нулей) без изменений каждый раз сдвигается на единицу вправо. Число слагаемых А6(я) у трансверсального фильтра равно числу т (конечно), поэтому их называют еще фильтрами с конечной импульсной характеристикой.
 |
|
 |
|
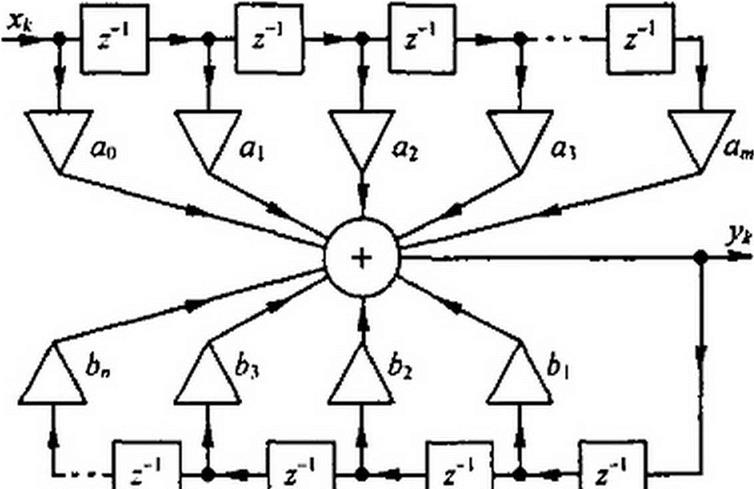
В рекурсивных фильтрах выходной сигнал создается не только последовательной совокупностью входных сигналов х*, х*_2,..., как в трансверсальном фильтре, сдви
нутых по времени, но и последовательной совокупностью выходных сигналов Ук > -Мл-1. Ук-2 также сдвинутых на свое время запаздывания. Таким образом, рекур
сивный фильтр — это в общем случае система с многопстлевой обратной связью. Алгоритм обработки сигналов в рекурсивном фильтре таков:
Ук ==<*0 *к +й| Jf*-1 +-. + ^m *к-т + *| Zk-| Ъ-2+- + ^ Ук-п-
Структурная схема рекурсивного фильтра изображена на рис. П8.4, а нижняя часть рис. П8.5 осуществляет обратную связь.
Перепишем алгоритм обработки с учетом запаздывания;
0 = хДао+<2) Г1 + ... + o„ z'w)+y*(l~^ г"1 -b2 z-2z~n).
Из него следует, что передаточная функция A'(z) рекурсивного фильтра
 | |||
 | |||
Импульсная характеристика hb(и) рекурсивного фильтра за счет обратной связи теоретически имеет очень большое число слагаемых*1, поэтому рекурсивные фильтры именуют еще фильтрами с бесконечной импульсной характеристикой (БИХ-фильтры). В ячейках памяти рекурсивного фильтра хранятся значения предшествующих состояний х„ и у„.
‘‘Слагаемые, из которых состоит характеристика 55(л) рекурсивного фильтра, получим, разделив числитель формулы (П8.2) на ее знаменатель.
§ (18.4. Алгоритм получения передаточной функции цифрового фильтра. В руководствах по аналоговым фильтрам [И, 17] приведены таблицы полиномов знаменателя передаточной функции К(р) низкочастотных аналоговых фильтров, аппроксимированные различными способами (по Чебышеву, Баттерворту, Бесселю и др.). Частота среза сос в этих таблицах принята равной 1 (нормирована). Полиномы подсчитаны при заданном максимальном отклонении модуля К(р) в полосе пропускания от I и заданном затухании в полосе затухания при со = k wc (задано к > I).
Алгоритм получения K{z) цифрового фильтра, основанный на инвариантности импульсной переходной характеристики, включает следующие этапы:
1. По заданным требованиям к цифровому фильтру выписываем из таблиц К(р) аналогового фильтра, полагая, что он должен удовлетворять тем же требованиям по затуханию и по максимальному отклонению, что и цифровой.
м Ai
2. Если К(р) аналогового фильтра может быть представлен в виде К(р)= £—-—,
< . Р ~ Pl то переход к A’(z) осуществляют по формуле:
м

 = X
= X
*=|
3. Если К{р} может быть представлен в виде р12=-б±у<о0, то K(z) цифрового фильтра
______ I ~z 1 е~67 cos о о Т___ 1-е"1 2 е”67 cosa0 Т + z~2 е"2Ъ1
Рассмотрим пример. Пусть аналоговый фильтр — прототип второго порядка при ап
проксимации по Баттерворту (см. § 10.11) — имеет К(р) = -—------------------------------------------------------------------------------ ---------------------------------------------------------------------------------- , корни полино
р2 +-J1 р +1
ма Pi. 2 = ~а ± J а-> где а = 0,707.
 |  | ||||||||||||||||||
 | |||||||||||||||||||
 | |||||||||||||||||||
 | |||||||||||||||||||
 | |||||||||||||||||||
 | |||||||||||||||||||
 | |||||||||||||||||||
 | |||||||||||||||||||
 | |||||||||||||||||||
|
 | ||||||
 | ||||||
 | ||||||
 | ||||||
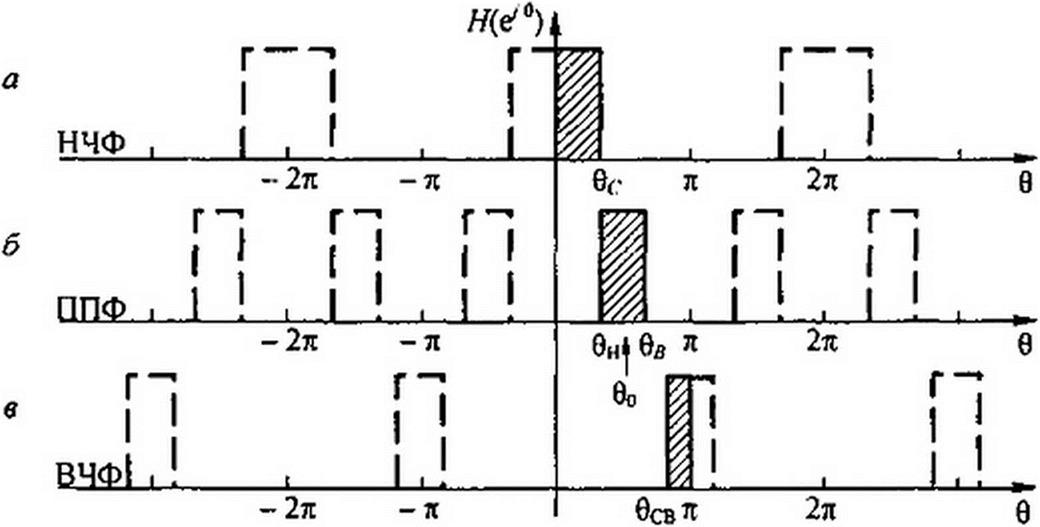
Рис. П8.7
На постоянном токе (ю = 0,0 = 0) |К(г)| = 0,373. Чтобы нормализовать K(z) примера, надо K(z) умножить на 1/0,373 - 2,68. В полосе пропускания НЧ фильтра 9 изменяется от 0 до ос Т, где нормированная частота среза wc = 1, в полосе затухания 9 изменяется от <ос Т до 0 < л.
У аналогового фильтра НЧ имеется только одна полоса пропускания от 0 до <дс. У соответствующего цифрового фильтра НЧ теоретически имеется несколько полос пропускания. так как функция е>е является периодической (е>0 = еу(в+2 к я), где к — целое положительное число). Случай к * 0 не используется.
На рис. П8.7. а штриховкой показана полоса пропускания. Неиспользуемые полосы . . d ф(0) rt
показаны пунктиром. Групповое время запаздывания т(0) = —для цифровых филь- 4/0
трое, в основу формирования которых положено билинейное преобразование (см. § П7.8), связь й с 0 получаем так:
2 1~е"'° .2 9
P = = ---------- -т- = Jzz
Т 1 + с /0 Т 2
поэтому
и-ytgp (П8.6)
т. е. связь со с 0 оказывается нелинейной. Если известна частотная характеристика аналогового фильтра К(J со), то для получения частотной характеристики соответствующе- . . .20
го цифрового фильтра в этом случае надо j <о заменить на j — tg—. 7"* 2
§ П8.6. Частотные преобразования цифровых фильтров. Подобно тому как аналоговый фильтр НЧ путем преобразования частоты (см. Приложение П6) может быть преобразован в аналоговые фильтры ВЧ, ПП и ПЗ, цифровой фильтр НЧ может быть преобразован в цифровые фильтры ВЧ, ПП, ПЗ.
l. Преобразование НЧ ЦФ в полосно-пропускающий ЦФ. НЧ ЦФ с частотой среза = 1 надо преобразовать в ПП ЦФ с центральной частотой 0О, верхней 0В и нижней 0Н. Частоты 9о,0в,0н связаны уравнением
cos0ft - со$((е» +0и)/2)
° ’ cos((9B -9J/2)’
m. е. две частоты из трех независимы.
K{z) ПП ЦФ получают из K(z} НЧ ЦФ путем замены
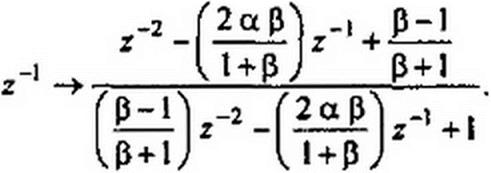
Здесь
a = cos0o, Р =
2. Преобразование НЧ ЦФ в ВЧ ЦФ. Полагаем, что НЧ ЦФ с частотой среза 0С надо преобразовать в ВЧ ЦФ с частотой среза 0С8. K(z) фильтра ВЧ получают из Л’(г) фильтра НЧ заменой
-\ , г'1 +a п = -cos[(0c-0ca)/2]
l + az’1 ’ где cos[(0c 4-0св)/2] ’
На рис. П8.7, б, в заштрихованы области работы ПП ЦФ и ВЧ ЦФ (штриховой линией показаны неиспользуемые области).
§ П8.7, Реализация передаточных функций цифровых фильтров. Известно несколько различных способов реализации ЦФ (I1J. Рассмотрим один из вариантов так называемого прямого метода. Он имеет преимущества в стоимости при K(z) низких порядков.
Передаточной функции
ы
| + 2>2
/-1
соответствует разностное уравнение
N М
= х(п~~• (П«.8>
i=0 /я!
М
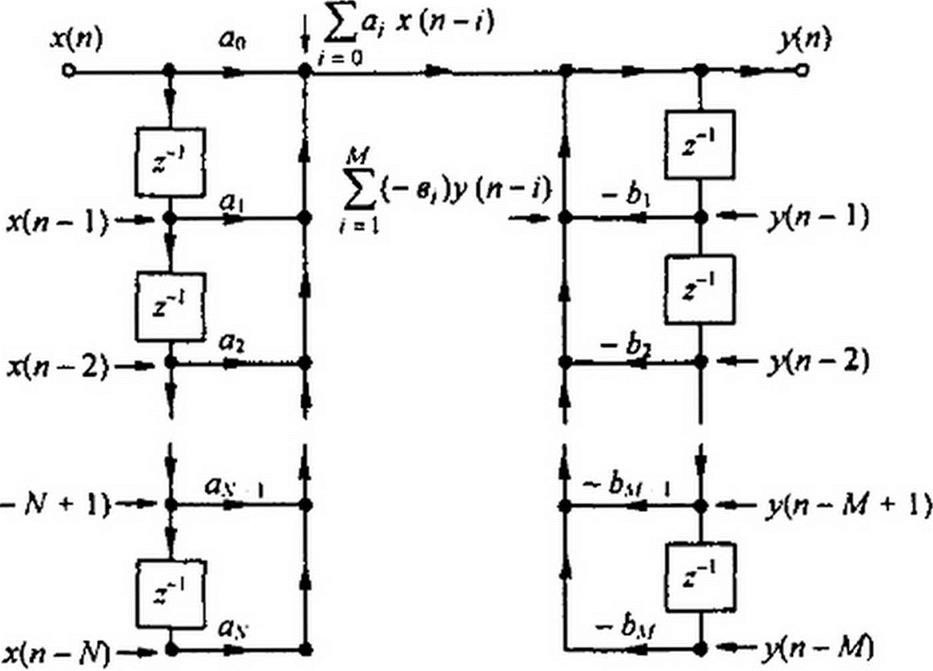
Рис. П8.8
 |
|
 |
|
Уравнению (П8.8) отвечает схема рис. П8.8. Стрелки в узлы левой части рисунка поясняют, что сигналы х(п-1), х(л-2),... поступают в эти узлы с задержкой на Г, 2Т,... и т. д. Аналогично стрелки -► в узлы правой части схемы поясняют, что в соответствующие узлы сигналы v(w -1). у(п - 2),... поступают с задержкой в Т,2Т,... ит.д.
l-z'2
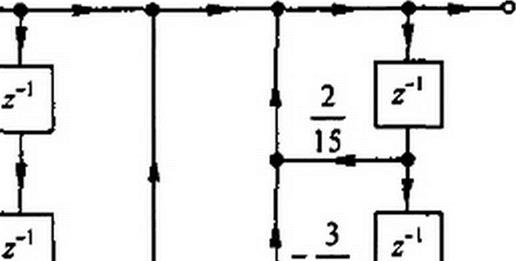
В качестве примера реализуем К{г) =------------- ------- ------------------------------------------------------------------------ —----- .
. Z J -2
1- — Z +— 2 *
15 15
Схема показана на рис. П8.9. Соответствие схемы на рис. П8.9 заданной K(z) проверим по формуле Мезона (см. § П1.1)
' ' ' Д
2
где Р} = I, Р2 =-1 г"1 г-1. Граф имеет две петли обратной связи с передачами — z'}
 Обе петли касаются прямых путей, поэтому Д( = Д2 = 1. Определитель гра-
Обе петли касаются прямых путей, поэтому Д( = Д2 = 1. Определитель гра-
 l-z'2
l-z'2
—-------- ---------- , как и задано.
— Z ’ + —— Z
15 15
§ П8.8. Устойчивость работы цифровых фильтров. Работа рекурсивных цифровых фильтров за счет наличия в них обратной связи может оказаться неустойчивой. Рассмотрим простой способ исследования устойчивости работы рекурсивных фильтров по величине и знаку коэффициентов 2>|( b2, bit... знаменателя его передаточной функции К(г) (формула П8.2).
Исходим из того, что рекурсивный фильтр сформирован по его аналоговому прототипу. Способ исследования будем иллюстрировать простым примером. Пусть знаменатель K(z) рекурсивного фильтра равен 1 ~bt z‘l -b2 z~2. Поступаем так: перепишем знаменатель
и приравняем его нулю. Определяем численные значения корней уравнения z2 -Ьх z~b2 = 0. Они равны
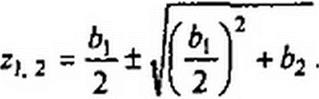 |
Далее исходим из того, что полюсы аналогового прототипа рх и р2 и полюсы zt и z2 цифрового связаны соотношением
2 .
Pk =у
 | |||
 | |||
Ряд для In zk сходится очень быстро, так что можно ограничиться первым членом ряда, и потому положим pi, = —
Множитель 2 / Т в последнем выражении больше нуля и потому он не влияет на вопрос о том, в левой или в правой части плоскости р оказываются корни рк. Поэтому вместо комплексной плоскости р будем проводить исследование устойчивости с помощью 2
комплексной плоскости р' = — р. Координаты точек плоскости р' будут равны координатам точек плоскости р, умноженным на Г/ 2.
Далее будем оперировать с плоскостью р' и с плоскостью z. Координаты точек р\ и zk этих плоскостей связаны двумя взаимно-обратными преобразованиями:
Р’к = ^4 (П8.9)
z* -1 И
г*=-4~- (П8.10)
Рк "I
Формулу (П8.10) получим, если решим (П8.9) относительно zk.
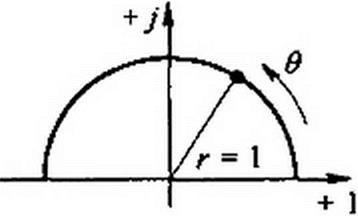
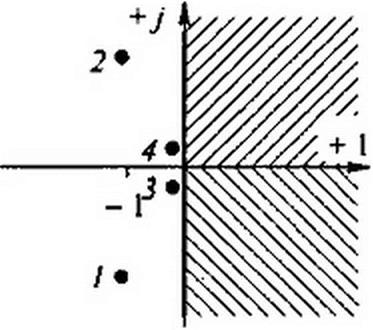
Рассмотрим соответствие точек плоскости р' с точками плоскости г (см. рис. П8.10). Точке р\ =-1 соответствует точка г* =0 (тс. начало координат плоскости г). Мнимой оси плоскости р\ т. е. величине р' - j к (где к — действительное число) соответствует
 |
| ||||
| ||||
 |
| ||||||
| ||||||
| ||||||
Рис. П8.10
окружность единичного радиуса на плоскости г. Действительно, точки этой окружности будут описываться выражением
_jk + l Jl + Pc-'"*»*
j k -1 + cJ (x-arc,s*>
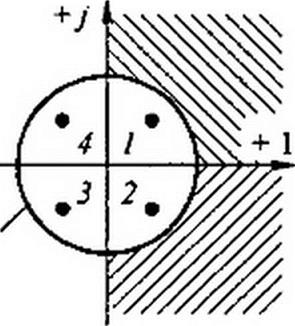
Точки, обозначенные цифрами /, 2, 3, 4, лежащие внутри окружности единичного радиуса на рис. 3.10, б, соответствуют точкам J, 2, 3. 4 на рис. П8.10, а, лежащим в левой части плоскости р'.
Точка 1 г, =0,5 + у 0,5. Ей соответствует р'} = 2,242 е-71,7 .
Точка 2 z2 = 0.5 - j 0,5. Ей соответствует р2 = 2,242 е7117 .
Точка 3 z3 = -0,5 + j 0,5. Ей соответствует р'3 = 0,445 е“7117 .
Точка 4 z4 = -0,5- у 0,5. Ей соответствует р\ = 0,445 е7117 .
Верхней части правой полуплоскости р’ (см. одинаковую штриховку на рис. П8. 10, а и б) соответствует нижняя, а нижней части правой полуплоскости соответствует верхняя часть правой полуплоскости г.
Таким образом, если все полюсы zk K(z) окажутся внутри единичной окружности на плоскости z, то работа рекурсивного цифрового фильтра будет устойчива (подобно тому
как будет устойчива работа аналогового фильтра прототипа, у которого все полюсы будут в левой полуплоскости р').
Если же хотя бы один полюс zk окажется не внутри, а снаружи единичной окружности на плоскости z, то работа рекурсивного цифрового фильтра будет неустойчива, и надо будет изменить интервал дискретизации Г, чтобы работа фильтра стала устойчивой (от величины Тзависят модули и знаки коэффициентов dj,62,... в знаменателе K(z)).
В качестве примера рассмотрим два случая, в первом примем, что b} = -I и Л2= 0,5, во втором, что = -!, b2 = -0,5. По (П8.9) и (П8.Ю) в первом случае гх =0,366 и z2 - -1,366 (при этом р\ = -2,154 и р'2 = 0,154) — работа цифрового фильтра будет неустойчива. Во втором zt = -O,5 + jO,5 и z2 = -O,5-yO,5 (при этом р\ =0,445e~J 117 и р2 = 0,445 еу 117 ) — работа цифрового фильтра будет устойчива.
Если полином знаменателя K(z) будет иметь не второй, а третий или четвертый порядок, то корни его после небольших преобразований определим через радикалы. При пятой и более высоких степенях полинома знаменателя корни придется определять с помощью ЭВМ.
В заключение отметим, что в рекурсивном фильтре при определенных условиях возможно возникновение своеобразного автоколебательного процесса: выходной сигнал y{t) возникает при отсутствии входного сигнала x(t) на входе фильтра. Такой процесс в фильтре может возникнуть, если в ячейках памяти фильтра сохранены значения величин х(п) пу(п) предшествующего режима работы фильтра, если часть полюсов K(z) находится вне окружности единичного радиуса и если действует генератор импульсов синхронизации.
Приложение П9