
Z|(p)-p £| -р3 £, + Р2 £,) + р^-Ьц Д]) + а0








Обратим внимание на то, что в знаменателе Уо(р) имеется слагаемое - р3 которое при дальнейшей реализации приведет к появлению в схеме отрицательной индуктивности.
8. Поскольку при p = j W] Z}(р) - р = 0, то У0(р) = а>, т. е. p = jti>o является полюсом К0(р). Наличие полюса у YQ{p) позволяет представить оставшуюся часть двухполюсника ветвью из последовательно соединенных £, и С2, настроенной в резонанс на частоту <о0, и параллельно ей присоединенного двухполюсника сопротивлением Z2(/?) (рис. 10.5, г):
 (10.8)
(10.8)
9. Полагают Z2(p)= W2(p)/M2(p). Степени полиномов ^2(^>) и М2(р) должны быть такими, чтобы после приведения правой части (10.8) к общему знаменателю степень полинома числителя левой части равнялась степени полинома числителя правой части; то же и в отношении степеней знаменателей. Так. если Х0(р) соответствует выражению (10.7), то Z2(p) = Л'2(р)/Л/2(р).
Методом неопределенных коэффициентов можно найти с^, dQ и Ь2. В рассматриваемом случае
 ci — — £| coj; Cq = gq, do = Z>q,
ci — — £| coj; Cq = gq, do = Z>q,
L2 = Д) /(bQ - «5); c2 = 1 /(<0q L2).
Разность (до-соб)>О; это следует из того, что условие ^,>0 означает, что
 | |||||||
 | |||||||
 | |||||||
 | |||||||
10. Реализацию Z2(p) производят, как правило, лестничной схемой. В рассматриваемом примере Z2(p) реализуют индуктивным (£3 = с|/г/0 = -<оо Д|/60) и резистивным (Я3 = а0 fbQ) элементами (рис. 10.5, о). Важно обратить внимание на то, что Lj оказалась отрицательной.
11. Так как физически осуществить отрицательную Ly в линейной цепи невозможно, то дальнейший этап реализации в методе Бруне состоит в том, чтобы три магнитно не связанные индуктивные катушки, имеющие индуктивности £4, £5 и £3, заменяют транс-
 форматором, состоящим из двух катушек— L4 и Ls, между которыми имеется магнитная связь (взаимная индуктивность М). Это действие является обратным по отношению к операции «развязывания» магнитно-связанных цепей.
форматором, состоящим из двух катушек— L4 и Ls, между которыми имеется магнитная связь (взаимная индуктивность М). Это действие является обратным по отношению к операции «развязывания» магнитно-связанных цепей.
На рис. 10.5, е изображены два участка цели: левый —до преобразования, правый — после преобразования; показаны положительные направления токов в ветвях и указаны одноименные зажимы катушек.
Напряжения между точками / и 2 для обоих участков цепи в силу их эквивалентности должны быть одинаковы, т. е.
р £| /\ + р Ь2 /2 = р £4 Д - р М /3;
—р L2 /2 + Р Т-з Iз ~ Р 73 — р М I).
 Подставляя в эти две строки /, = /2 + /3 и учитывая, что каждая из них должна удовлетворяться при любых значениях токов, получают
Подставляя в эти две строки /, = /2 + /3 и учитывая, что каждая из них должна удовлетворяться при любых значениях токов, получают
£4 £i + £2; £5 = £3 + £3,
где L4 и £5 положительны. Окончательная схема изображена на рис. 10.5, ж.
12. Если условиться сумму степеней полиномов в числителе и знаменателе ^мд(р) называть порядком Z^(p), то совокупность перечисленных операций («цикл Бруне») позволяет снизить порядок на четыре. Естественно, что потребность в каком-либо одном или нескольких этапах в любом конкретном примере может и не возникнуть (например, в этапах 1 или 3).
Для Z^p), порядок которых достаточно высок, может возникнуть потребность применить эту последовательность операций не один раз. В заключение отметим, что если в п. 5 A'i <0, то £t <0, а вычитание, согласно п. 7, сопротивления -р|£| j сводится к прибавлению сопротивления +р | |.
Некоторым недостатком метода Бруне является его относительная сложность и необходимость введения в схему идеального трансформатора с коэффициентом связи k2 =M2/{L4 £,) = ].
§ 10.6 Понятнее минимально-фазовом и неминимально-фазовом четырехполюсниках. У минимально-фазовых (м. ф.) четырехполюсников все нули передаточной функции расположены в левой части плоскости /?. У неминимально-фазовых (н. ф.) четырехполюсников хотя бы часть нулей находится в правой части плоскости р.
Название объясняется тем, что при одинаковом значении модулей передаточной функции м, ф, и н. ф. четырехполюсников аргумент передаточной функции м. ф. четырехполюсника меньше аргумента передаточной функции н. ф. четырехполюсника. Поясним сказанное.
Сравним выражения для двух передаточных функций:
и К\р) = Р Р[-. р-р2 р-р2
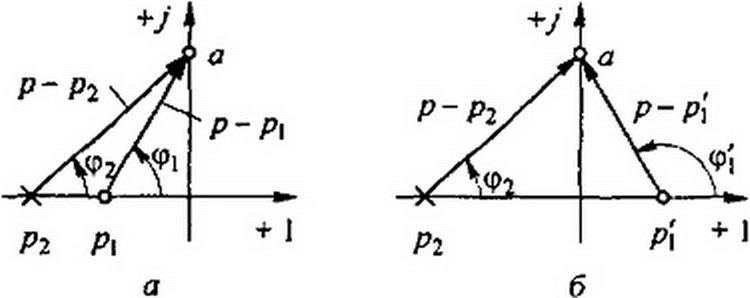
Положим, что р} и р[ равны по модулю и действительны. Нуль первого выражения находится в левой части плоскости р (рис. 10.6, о), а нуль второго р\=~~рх — в правой части плоскости р (рис. 10.6, б). Пусть на вход обоих четырехполюсников воздействует синусоидальное напряжение частотой о>. Некоторой конкретной частоте на комплексной плоскости соответствует точка а на оси +J. Образуем разности р-р^ и р-р2 на рис. 10.6, а и разности р- р\ и р- р2 на рис. 10.6, б:
 |  | ||
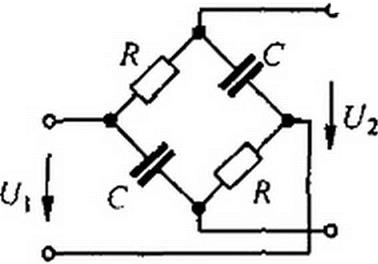
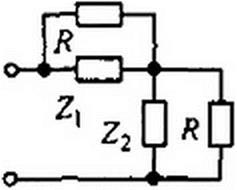
Модули этих передаточных функций одинаковы и равны р”/ р2 тогда как аргументы различны. Аргумент ср, -<р2 первого четырехполюсника меньше аргумента ф, ~<р2 второго четырехполюсника. Четырехполюсник с передаточной функцией Kf(p) — м. ф., а четырехполюсник с К\р) — н- Ф- Пример н. ф. четырехполюсника — на рис. 10.7. Для него
 | |||
 | |||
 |
|
 |
| ||||
| ||||
В м, ф. четырехполюснике существует однозначная зависимость между модулем и аргументом передаточной функции. В н. ф. четырехполюсниках между модулем и аргументом передаточной функции нет однозначной зависимости.
§ 10.7 Типы задач ло синтезу четырехполюсников. Синтез четырехполюсников включает в себя рассмотрение различных способов решения следующих групп задач:
§ 1.1 тез четырехполюсников по их передаточным функциям К(р);
§ 1.2 тез четырехполюсников, которые могут осуществлять либо только фазовую, либо только амплитудную коррекцию;
§ 1.3 тез четырехполюсников, обеспечивающих устойчивость работы системы.
Решение задач первой группы выполняется в два этапа. Первый этап состоит из аппроксимации частотной характеристики А'(р), которую хотят получить от четырехполюсника (два различных способа осуществления этого этапа применительно к фильтрам рассмотрены в § 10.12). Второй этап состоит в реализации либо схемой с пассивными элементами (например, схемой, рассматриваемой в § 10.8), либо схемой, содержащей и пассивные, и активные элементы (§ 10.9). Подход к решению задач второй группы рассмотрен в § 10.10 (фазовая коррекция) и в § 10.11 (амплитудная коррекция). Алгоритм решения задач третьей группы рассмотрен, например, в [33].
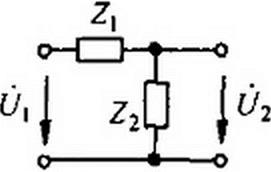
§ 10.8 Синтез четырехполюсников Г-образными ЯС-схемамн.
Г-образный четырехполюсник (рис. 10.8) является делителем напряжения. Его передаточная функция по напряжению при холостом ходе

|
Ш = Z2(p)
Ц(Р) Z|(p) + Z2(p)'
В дальнейшем вместо Z;(p) и Z2(p) будем писать соответственно Z] и Z2.
Положим, что с помощью Г-образного четырехполюсника, состоящего из RC-элементов, требуется реализовать передаточную функцию по напряжению при холостом ходе:
 | |||
 | |||
где /V и Л/— полиномы по степеням р; У/Л/ удовлетворяет условиям, которые предъявляются к передаточной функции /?С-четырехполюсника.
Приравняем правые части (10.11) и (10.12):
 У_ = _^2_ М ~ Z\ + z2 “
У_ = _^2_ М ~ Z\ + z2 “
Разделим числитель и знаменатель правой части (10.13) на некоторый полином Q = Q(p), имеющий тот же порядок, что и полиномы У и Л/; корни его чередуются с корнями уравнений У = О и М = 0. Тогда
 Z2 N/Q
Z2 N/Q
Z,+Z2 MIQ'
Из уравнения (10.14) находим Z2 -N/Q и Z| = (М -N)/Q. Реализуем двухполюсники Zj и Z2 по найденным операторным сопротивлениям^. Реализацию двухполюсников производят в соответствии с § 10.3 и 10.4.
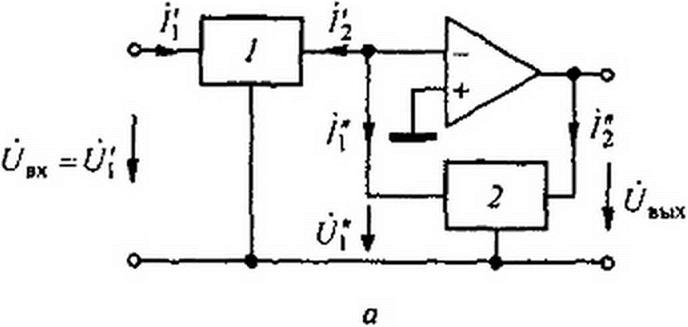
§ 10.9 Синтез четырехполюсников по их К{р) схемами с ОУ в цепи обратной связи. Рассмотрим схему рис. 10.9, п, содержащую два линейных пассивных ЯС-четырехполюсника (/ и 2) и идеальный операционный усилитель (ОУ). В цепь обратной связи включены ОУ и второй четырехполюсник. Положительные направления отсчета токов и напряжений на элементах схемы показаны стрелками. Один штрих в обозначениях токов, напряжений и У-параметров четырехполюсников показывает, что рассматриваемая величина относится к первому четырехполюснику, а два штриха — ко второму.
Запишем уравнения четырехполюсников в У-форме:
 для первого /; = X/j С/; + у;21/;, /2 = У2| Ц' + У22^; для второго /;=Ун ЦЧУ12 С/2, Г2 = У/, t7f + У22 У2.
для первого /; = X/j С/; + у;21/;, /2 = У2| Ц' + У22^; для второго /;=Ун ЦЧУ12 С/2, Г2 = У/, t7f + У22 У2.
Напряжение на входе схемы 1]^ равно напряжению на входе первого четырехполюсника, т. е. (jвх = С/.', а напряжение на выходе первого четырехполюсника (Д равно напряжению на входе второго (7*, и оба эти напряжения равны нулю, так как являются напряжениями на входе ОУ. Кроме того, напряжение на выходе схемы (7еых равно напряжению на выходе второго четырехполюсника t/2, а ток Г2 так как входной ток ОУ равен нулю. Из (10.15) следует, что
/2=^1^вх И /Г=-/2=^21^Ых.
Предполагаем, что полином Q(p) может быть найден и и Z2 удовлетворяют условиям. перечисленным в § 10.2.
 |
|
 |
|
Учтем, что четырехполюсник 1 — взаимный, поэтому = ^12> и П0‘
лучим передаточную функцию схемы по напряжению
 | |||||
 | |||||
 | |||||
Знак минус в (10.16) свидетельствует, что напряжения С/вых и С/ъх находятся в противофазе (ОУ в инвертирующем включении). Поскольку параметры У(2 четырехполюсников могут быть выражены через параметр В и определитель Д = 1 уравнений четырехполюсников, записанных в Л-форме (см. § 4.7), т. е. У12 = - Д, то К(р) можно записать и так:
 В
В
(10.17)
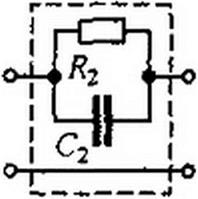
В качестве примера составим К(р) для случая, когда первый четырехполюсник собран по схеме рис. 10.9, б, а второй — по схеме рис. 10.9, в. Учтем, что проводимость двух параллельно соединенных элементов равна сумме их проводимостей, а при последовательном соединении двух элементов проводимость равна произведению проводимостей этих элементов, разделенному на их сумму:
 |
Подставим полученные выражения в (10.16):
______ ^2 Q Р _______________
С\ С2 + р (/?| + Р-2 С2) + I
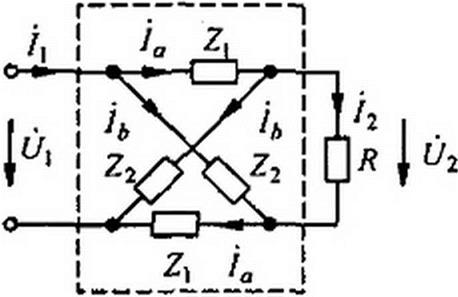
§ 10.10 Четырехполюсник для фазовой коррекции. На рис. 10.9 изображена симметричная скрещенная схема из чисто реактивных двухполюсников Z, и Z2, на выходе которой включен резистор сопротивлением R. Положительные направления токов и напряжений указаны на схеме.
В уравнении й'2 + fa = fb Z2 заменим </2 на /2 R и учтем, что /2 = ja - jb. Это дает возможность выразить /А через /о :
 |
Подставим /А в /2 = la-Ih и найдем
 |
Составим уравнение для периферийного контура:
 |
|
Передача напряжения
Ц2 R(Z2-Z}} (7, R(ZX +Z2) + 2Zj Z2'
Входной ток
 |
Входное сопротивление
(7, ^/?(Z1+Z2)-b2Z1Z2
/] 2 R + Zj + Zj
Приравняв ZBX = /?, получим соотношение Zj Z2 = R2. Из него следует, что реактивные сопротивления Zx и Z2 взаимно обратны.
В формулу для К(, подставим Z2 = R2 IZX :
 = К„ (ш)
= К„ (ш)
К + Z|
Так как Z( — чисто реактивное сопротивление, то модули числителя и знаменателя формулы (10.18) одинаковы и потому К(/((о) = 1. При изменении частоты о меняется только аргумент ф(<о)‘\ Четырехполюсник на рис. 10.10 служит для фазовой коррекции. С этой целью его включают между источником питания с внутренним сопротивлением R и актив-
Обратим внимание на то, что знак ф(со) противоположен знаку аргумента b в выражении постоянной передачи g~a + jb четырехполюсника.
 |
|
 |
|
 |
|
ной нагрузкой 7?, и он, не изменяя напряжение источника питания по модулю, поворачивает его на требуемый угол <р(со) по фазе, осуществляя этим фазовую коррекцию.
 Имея в виду, что - I; <
Имея в виду, что - I; <
z = R 1 - *7/ = R 1 - cos ф(ы) - j sin ср<со) = R ф(ы)
\ + К(/ 1 + со$ф(с))+ j sin<p(o) 2
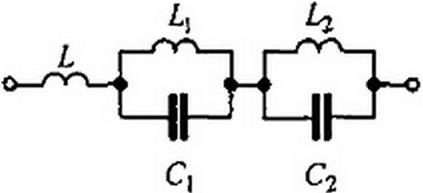
Сопротивление Z2=R2!Z{. Сопротивление Zt = j X чисто реактивное. График X=f(<n) имеет вид тангенсоиды. При ф(со) = л, 2 я,... Д'изменяет знак. Иногда Z: реализуют схемой на рис. 10.11. Для определения параметров данной схемы составляют столько уравнений, сколько параметров неизвестно, и затем эти уравнения совместно решают. Положим, что ф(е>) корректирующего четырехполюсника должна иметь значения Ф|(о>) при со,, ф2((й) при си2 и т. д. Тогда уравнения, которые нужно совместно решить относительно L, £b L2, Cit С2. получают, если входное сопротивление схемы (см. рис. 10.11)
 |
последовательно приравнивать к Z}--jR tg-^0^ при выбранных частотах. В результате система уравнений относительно I,, С|. С2 имеет вид
 |
§ 10.11 Четырехполюсник для амплитудной коррекции. Схема четырехполюсника, осуществляющая амплитудную коррекцию, изображена на рис. 10.12. Корректор нагружен на резистор сопротивлением Я, входное сопротивление его также равно R. Сопротивления Z, и Z2 вза* имно обратны (Z|Z2=T?2). Постоянную передачу g=a+jb (см. § 4.10) в этом случае определяют по формуле
ех =1 + Zi//?.
 |
сти оттого, что представляет собой сопротивление Z}, характер зависимости а = /(©) оказывается различным. В качестве примера на
R R R R
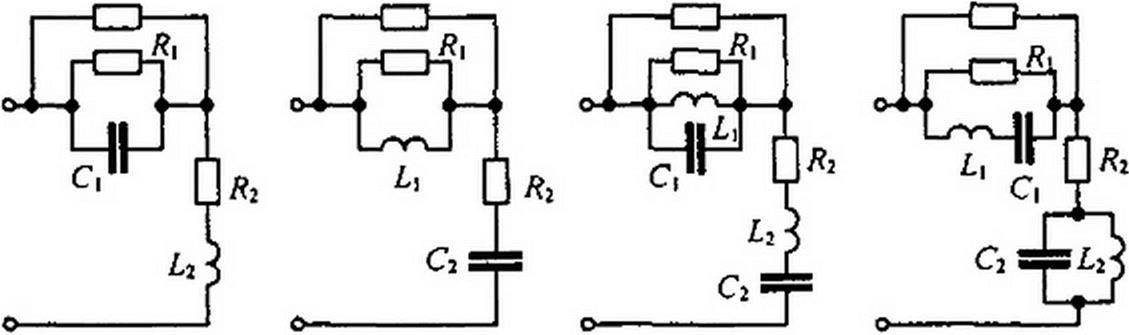

а б в
Рис. 10.13
рис. 10.13, а-г изображены четыре схемы с различными ZK и Z2 и графики соответствующих им зависимостей.
Схему амплитудного корректора выбирают в соответствии с той зависимостью а- /(со), которую необходимо реализовать. Параметры схемы корректора (например, сопротивление емкость конденсатора С} для схемы на рис. J0.13, а) определяют путем совместного решения системы уравнений, полученных приравниванием модуля величины значению е° при фиксированной частоте со. Уравнений составляют столько, сколько в Zt неизвестных параметров. Уравнения имеют вид:
11 + Z, IRI =ea(w,), Il + Z, /R = е0(<|>:), ....
I 1 Ю>| • 1 0)2
Частоты coj,co2,... выбирают для характерных точек зависимости a- /(<$) либо через равные интервалы.
§ 10.12 Аппроксимация частотных характеристик. Аппроксимация — это приближенная замена заданной частотной зависимости другой частотной зависимостью, которая точно совпадает с заданной в ограниченном числе точек, отклоняется от нее в допустимых пределах вне этих точек, давая в то же время физически реализуемую функцию. Например, кривая (Л7(/со) [ на рис. 10.14, а — это частотная характеристика идеального фильтра НЧ | K{J х) | = Дх). где K(j х) —передаточная функция; х = (о/ос, где ос — безразмерная величина, равная частоте среза.
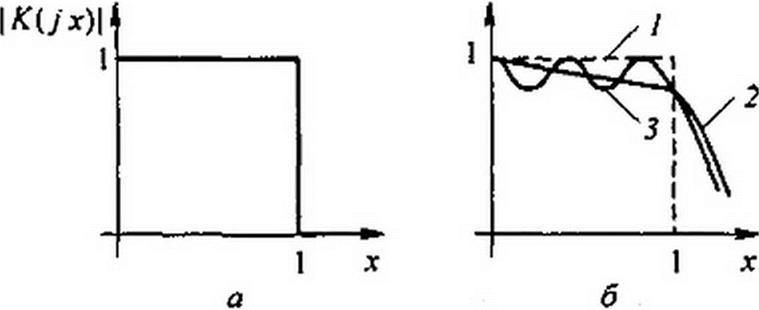
Рис. 10.14
В диапазоне изменения х от 0 до 1 |j<(j x)l = I; при х> I |К(У х)| = 0. Штриховая линия (рис. 10.14, 6) повторяет кривую на рис. 10.14, а, кривая 2 характеризует гладкую аппроксимацию, при которой отклонение от кривой 1 неодинаково в диапазоне аппроксимации. Кривая 3 иллюстрирует равноволновую аппроксимацию, при которой абсолютные значения максимальных отклонений от средней линии в обе стороны одинаковы. Гладкую аппроксимацию осуществляют обычно полиномами Баттерворта, равноволновую — полиномами Чебышева. Известны и другие способы аппроксимации [10], у каждого из них имеются свои достоинства и недостатки.
Гладкая аппроксимация. Применительно к фильтру НЧ аппроксимацию квадрата модуля передаточной функции четырехполюсника осуществляют так:
ко х)|2
Принимают, ^то при x=l [£(j х)| = 1/г/2, откуда /и = 1. Полагая p = jx, найдем полюсы |А’(/х)| :
K(j х) К(-/ х) =
При нечетных п
pk =1)/2" ^cjkKl,> к =0,1.................... п;
при четных п
Рк = (-1),/(2"> = е 2" , * = 0.1,...,и.
Полюсы расположены симметрично по окружности единичного радиуса. Полиномы (р-р\)...{р-р„) образуют знаменатель K{j х) и называются полиномами Баттерворта. При составлении их используют значения р, находящиеся в левой полуплоскости. Это обеспечивает физическую осуществимость К(р\ Запишем полиномы: при п = 1 —р + 1; при п = 2 — р2 +J1 р + 1; при п-3— р3+2р2+2р + 1.
Задаваясь требуемым затуханием фильтра в децибелах (обычно при х = 2) а = 10 lg(l/| Ш2)2. определим п:
 | |||
 | |||
Например, при а = 18 дБ и = 18/(20 Ig2) = 2.98 * 3. В рассматриваемом примере
ад=-5--------------- ; •
р3 + 2 р“ + 2 р+ 1
Функцию К(р] реализуют известными методами.
Равноволновая аппроксимация. Полиномы Чебышева порядка п записывают в тригонометрической форме:
Т„(х) - cos п arccos х.
Полагая arccosx = 9 и имея в виду, что cosп0 = cos" 0- П cos"’2 0 sin2 0 +..., а sin0 = д/1 - х2, получим алгебраическую форму записи полиномов:
Г„(х) = х" + С2 х"“2 (х2 - 1) + С* х"’4 (х2 -1)2 + ....
Например, при п = 5 Т5 (х) = 16 х2 - 20 х3 + 5 х.
Так. Г„(х) колеблется от 1 до -I в интервале х = 0*| (рис. 10.15. а) и монотонно возрастает при х > 1.
 |
|
Квадрат модуля нормированной передаточной функции фильтра НЧ с помощью полиномов Чебышева аппроксимируют так:
 | |||
 | |||
Максимальное отклонение |/v(jx)| от 1 равно у-/2
 |
При х > 1, т. е. в области затухания фильтра НЧ,
у2 Т„{х) » 1 и I K(j х) I = —-— = —-—!-------------------------- .
У Цх) у ch(n Arch х)
Примерный вид аппроксимирующей кривой \K{j х)| показан на рис. 10.15, б.
Для заданного отклонения у и затухания а в децибелах при .г = 2 а = 20 lg| Ut/U2 i ~ 20 lg[ l/K(y 2)j порядок полинома Чебышева определяют по формуле
। 1о«/2О
п -------- Arch----------- ,
где 1,32- Arch 2.
Например, для у = 0,4 и а = 30дБ при х-2 | K(j x)J = 0.03!8;
 1 a J0 п =--- Arch-----------
1 a J0 п =--- Arch-----------
 1.32 0,4
1.32 0,4

|
|
|
следует определить полюсы [ K(J х) |2, находящиеся в левой х = рк / j и приравняем к нулю знаменатель
При х>1 Г„(х) = Г„(рА/y) = chnArch(pA/y).
Так как рк — комплексное число, то arccosp* /у — тоже комплексное число, которое положим равным аЛ + J$k. Тогда
Тп(рк //) = со5(ла* +■ jл Р>)-cosset* сБл0> - /sin и a* sh п pj = ±у'/у. Отсюда
cos n a* ch n Р* = О, sin л а* sh п Р* = ±1/у.
Так как chap* *0, то
cos«aA=0 и а* = (2 к + 1) А =0,1,..., и. 2 п
При этом
sin/ra* =±1; sh«pj=l/y; Р> = ~ Arsh(l/y). л
Так как
arccos(p*/j) = а* +/₽*.
ТО
Рк = ак + j bk = j cos(aA + j РА).
Действительные и мнимые части полюсов рк, лежащих в левой полуплоскости:
 ак = -shp* sin(2к +1) —; Pt=ch0tco$------------------------------------------------------------------ —
ак = -shp* sin(2к +1) —; Pt=ch0tco$------------------------------------------------------------------ —
2 и 2 л
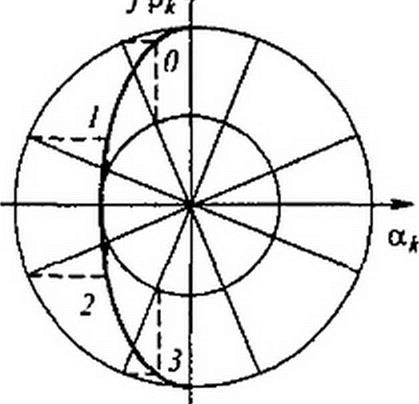
Из последней строчки следует, что ак /sh2 р* +bk /ch2 pt = I. т. е. полюсы рк расположены на эллипсе, одна полуось которого равна sh Р*. другая — ch рЛ.
В рассматриваемом примере при п-4 и у = 0,4 0* =0,412; shp* =0,421; ch р* = 1,08.
|
Для построения эллипса чертим две окружности, одну радиусом sh0*, другую радиусом ch 0* (рис. 10.16), и через начало координат проводим прямые до пересечения с окружностями под углами
= (2 к + 1) (л/2 л), где к = 0, 1..... л. В примере аЛ *22,3;67; 111; 156°.
Из точек пересечения лучей с окружностью меньшего радиуса проводим вертикали, а из точек пересечения с окружностью большего радиуса — горизонтали. Точки пересечения соответствующих юризонталей и вертикалей на левой полуплоскости дают искомые полюсы. В примере pQ 3 - -0.164± у 0,995; р) 2 =-0,388± у 0,416. Нормированная передаточная функция
 _________________ 1________________
_________________ 1________________
(Р~Ро){Р~Рз)(р-Р>)(Р-Р2>
____________________ 1___________________
((р + 0,164)2 + 0,9952) ((р + 0,3 88)2 + 0,4162)'
По К(р) определяют схему и ее нормированные параметры £н, Сн. Таблицы полиномов знаменателя нормированного К(р) низкочастотных фильтров, аппроксимированных различными способами, даны, например, в [10]. Для перехода от нормированных к действительным параметрам L, С пользуются соотношениями L = £н/ос и С=Си/ос.
Какому способу синтеза схемы и какой конкретной схеме следует отдать предпочтение, зависит не только от стоимости и габаритов при практическом осуществлении схемы. но и оттого, насколько фазочастотные характеристики получающихся четырехполюсников удовлетворяют поставленной задаче.
В заключение отметим, что нормирование распространяется не только на передаточную функцию четырехполюсника, но и на другие функции, в частности на входное сопротивление или проводимость двухполюсников.
Если аппроксимируют не передаточную функцию, а входное сопротивление (проводимость) некоторого двухполюсника, то оно обычно нормируется не только по частоте ы0-
но и по его числовому значению. При нормировании Z(p) по числовому значению входное сопротивление (проводимость) делят на некоторую безразмерную величину Лн. При переходе от схемы, реализующей нормированное сопротивление ZK (ее параметры Як, Ли, Сн и частота х), к той же схеме, но с ненормированными параметрами (ее сопротивление
Z, а параметры R, L, С), последние определяют, сопоставив почленно одинаковые слага-

 Z R j <а L 1 емые “ =—— +---
Z R j <а L 1 емые “ =—— +---
Ro Ro Ro j © C R$
В результате получим R = RH Ro; L- LH (Яо /w0); C = CH /{R^ ca0), где <oo — величина безразмерная.
Вопросы для самопроверки
1. Укажите два основных направления развития синтеза электрических цепей. 2. Определите задачи синтеза, перечислите условия, которым должны удовлетворять Z(p) физически реализуемых двухполюсников. 3, Поясните идею реализации двухполюсников лестничной схемой. Покажите, как следует упорядоченно определять ее элементы. Любое ли Z(p) может быть реализовано лестничной схемой? 4. Как осуществить реализацию путем последовательного выделения простейших составляющих? 5. Нарисуйте две канонические схемы двухполюсников, отображающие идеи реализации методом выделения простейших составляющих. 6. В чем идея реализации методом Бруне? 7. Какой четырехполюсник называют минимально-фазовым? 8. Сформулируйте, какие типы задач возникают при синтезе четырехполюсников. 9. Поясните этапы вывода формулы (10.17) для схемы рис. 10.9, а. 10. Определите К{р) четырехполюсника рис. 10.9, а, если в четырехполюснике Z, (рис. 10.9, б) последовательно соединены Л,, С| и I,, а второй четырехполюсник оставлен без изменений. 11. Начертите схему четырехполюсника для фазовой коррекции и поясните, как определить ее элементы, если известна зависимость ф(<о). 12. Изобразите схему амплитудного корректора и расскажите, как определить ее элементы, если известна зависимость а(©)- 13. В чем состоит задача аппроксимации и как она решается? 14. Поясните идею составления К(р} четырехполюсника, если в основу положена: а) гладкая аппроксимация; б) равноволновая аппроксимация. 15. Как от нормированных параметров перейти к ненормированным, задавшись некоторыми и га0? 16. Решите задачи 12.3; 12.6; 12.10; 12.7; 12.14; 12.17; 12.28.
Глава одиннадцатая
УСТАНОВИВШИЕСЯ ПРОЦЕССЫ
В ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ, СОДЕРЖАЩИХ ЛИНИИ