Если же описание динамики работы звена приводит линейному дифференциальному уравнению , то звено называется линейным динамическим звеном.








Исследование нелинейных дифференциальных уравнений существенно труднее и сложнее, чем линейных. Поэтому в тех случаях, когда это возможно, всегда стремятся линеаризовать нелинейное дифференциальное уравнение, т. е. заменить его приближенно некоторым линейным дифференциальным уравнением, решение которого достаточно близко к решению исходного нелинейного уравнения.
Простейший способ линеаризации основан на разложении нелинейной функции в ряд Тэйлора с последующим отбрасыванием нелинейных членов разложения. Линеаризация нелинейного уравнения всегда производится относительно некоторого, заранее выбранного, режима работы динамического звена. Чаще всего в качестве режима, принимаемого при линеаризации за исходный, выбирается установившийся режим, характеризуемый постоянством всех обобщенных координат.
1. Представляют все входящие в рассмотрение координаты в виде
где
В уравнениях  отклонения соответствующих координат от их значений (2.8), принятых за исходные при линеаризации. Соотношения (2.10) — (2.12) позволяют вместо полных значений координат
отклонения соответствующих координат от их значений (2.8), принятых за исходные при линеаризации. Соотношения (2.10) — (2.12) позволяют вместо полных значений координат  оперировать их отклонениями (или приращениями)
оперировать их отклонениями (или приращениями) 
2. Левую часть уравнения (2.5) разлагают в ряд Тэйлора относительно точки с координатами  соответствующей исходному режиму. В результате уравнение (2.5) переписывается в виде
соответствующей исходному режиму. В результате уравнение (2.5) переписывается в виде

В соответствии с правилом разложения функции нескольких переменных в ряд Тэйлора частные производные, входящие в левую часть уравнения (2.16), вычисляются в точке, соответствующей режиму, принятому за исходный при линеаризации, так что, например,  означает частную производную от функции
означает частную производную от функции  по переменной
по переменной  в которую после вычисления подставлены значения
в которую после вычисления подставлены значения  Так как в исходном режиме все координаты постоянны, то все фигурирующие в уравнении (2.16) частные производные представляют собой просто некоторые числа, зависящие от выбора исходного режима (т. е. от чисел
Так как в исходном режиме все координаты постоянны, то все фигурирующие в уравнении (2.16) частные производные представляют собой просто некоторые числа, зависящие от выбора исходного режима (т. е. от чисел  Символом
Символом  в уравнении (2.16) обозначен остаточный член разложения, содержащий вторую и более высокие степени отклонений
в уравнении (2.16) обозначен остаточный член разложения, содержащий вторую и более высокие степени отклонений  и их произведения, умноженные на соответствующие частные производные. Функция
и их произведения, умноженные на соответствующие частные производные. Функция  обладает тем свойством, что
обладает тем свойством, что

3. Отклонения  координат
координат  их исходных значений считают малыми («гипотеза малых отклонений») и на этом основании в левой части уравнения (2.16) пренебрегают членами, содержащими вторую и более высокие степени отклонений и их произведения
их исходных значений считают малыми («гипотеза малых отклонений») и на этом основании в левой части уравнения (2.16) пренебрегают членами, содержащими вторую и более высокие степени отклонений и их произведения
как членами более высокого порядка малости по сравнению с членами, содержащими отклонения в первой степени, т. е. полагают

Учитывая, кроме того, соотношение (2.9), окончательно получают уравнение

Это уравнение есть линейное дифференциальное уравнение с постоянными коэффициентами. Оно представляет собой результат линеаризации нелинейного уравнения (2.5) относительно исходного режима (2.8).
Из изложенного следует, что необходимым условием линеаризации является разложимость функции фигурирующей в левой части нелинейного дифференциального уравнения, в ряд Тэйлора в окрестности точки с координатами, соответствующими режиму, выбранному при линеаризации за исходный. Если такое разложение невозможно (например, функция недифференцируема по какой-либо из координат), то рассмотренный метод линеаризации не имеет силы, и исходное нелинейное уравнение даже приближенно не может быть заменено линейным. В этом случае говорят, что динамическое звено, описываемое таким уравнением, является существенно нелинейным, т. е. нелинеаризуемым. Деление динамических звеньев на линеаризуемые и нелинеаризуемые связано со способом линеаризации, основанным на разложении нелинейной функции в ряд Тэйлора. В главе 8 будут рассмотрены методы, позволяющие осуществить линеаризацию и существенно нелинейных уравнений (методы гармонической линеаризации).
Основным допущением, которое позволяет перейти от нелинейного уравнения (2.5) к линейному уравнению (2.19), является допущение о малости отклонений всех входящих в рассмотрение координат от их значений, принятых при линеаризации за исходные. Поэтому линеаризованное уравнение (2.19) дает возможность исследовать лишь малые отклонения величин, характеризующих работу динамического звена, от исходного режима. Однако и такое рассмотрение в ряде случаев очень полезно.
Запись линейного дифференциального уравнения в форме (2.19) является довольно громоздкой и неудобной для практического применения. В автоматике при записи линейных уравнений принято выходную величину звена (или ее отклонение) и ее производные записывать в левой части уравнения, а все остальные члены переносить в правую часть. В такой форме записи уравнение (2.19) примет следующий вид:

где

С целью сокращения выкладок в теории автоматического управления широко используется символический метод записи линейных дифференциальных уравнений, в основе которого лежит условное (символическое) обозначение производных и интеграла:
Здесь

— так называемый символ дифференцирования. Его не следует путать с комплексной переменной, фигурирующей в преобразовании Лапласа (см. § 4.2), которую иногда также обозначают буквой  В отличие от преобразования Лапласа (и родственных ему операционных методов) символический метод, сокращая и унифицируя запись дифференциальных уравнений и их систем, не содержит никаких приемов, облегчающих их решение.
В отличие от преобразования Лапласа (и родственных ему операционных методов) символический метод, сокращая и унифицируя запись дифференциальных уравнений и их систем, не содержит никаких приемов, облегчающих их решение.
При использовании символических обозначений уравнение (2.20) записывается следующим образом:

Уравнение (2.25) часто переписывают в виде

чисто формально отрывая символ дифференцирования  от обозначения дифференцируемой функции.
от обозначения дифференцируемой функции.
Если обозначить
7. Соединений элементов АСР.
Автоматические системы регулирования состоят из элементов различной сложности. Многие из них могут быть разделены на более простые звенья. При этом звенья должны обладать детектирующими свойствами и их динамические свойства должны описываться простейшими алгебраическими и дифференциальными равнениями. Звенья, обладающие такими свойствами, принято называть типовыми. Они имеют определенные названия в соответствии с их функциональными свойствами. Любой элемент системы может быть представлен в виде комбинации типовых звеньев. Они легко технически реализуются, что позволяет создавать устройства с заданными свойствами.
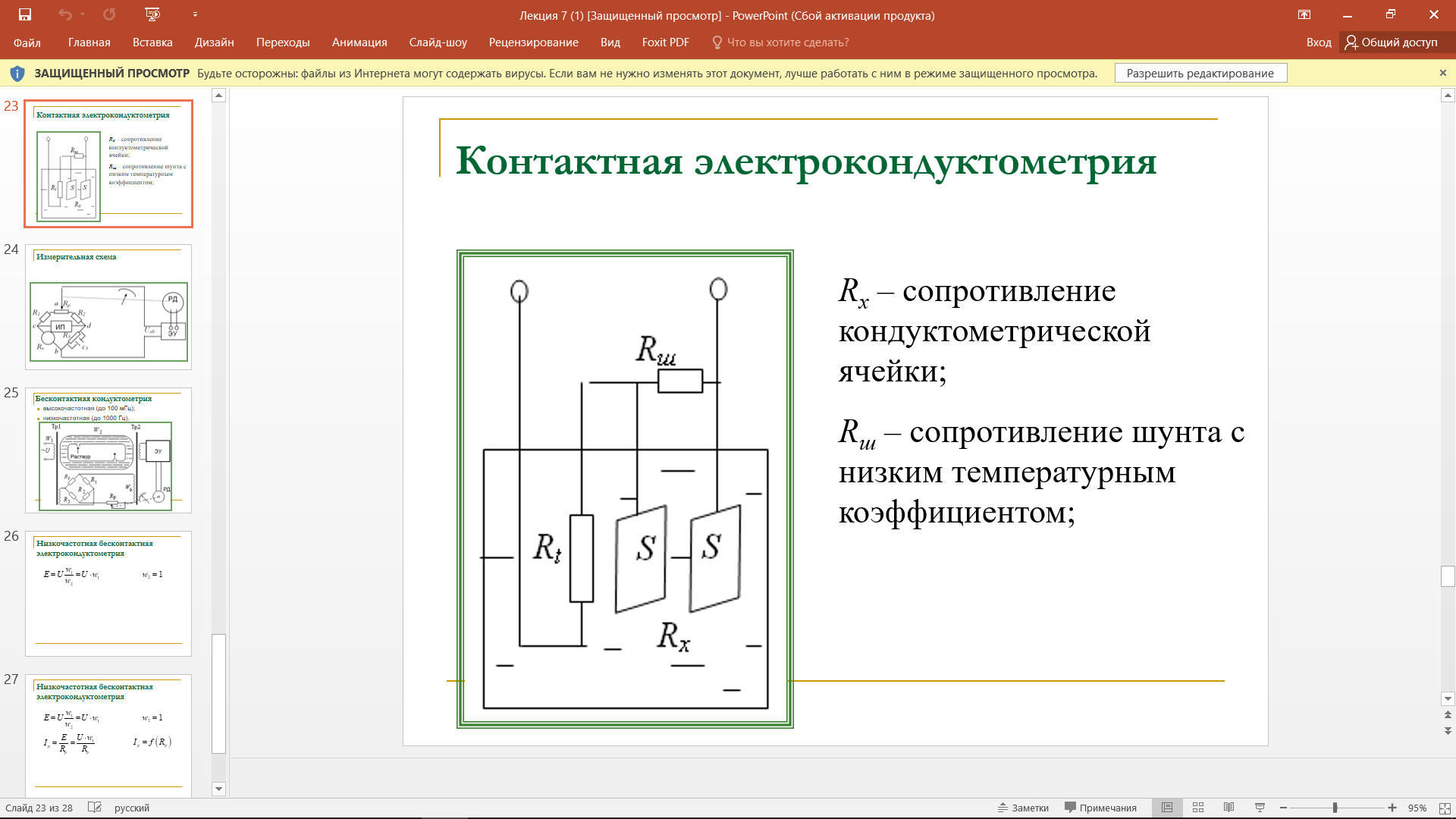
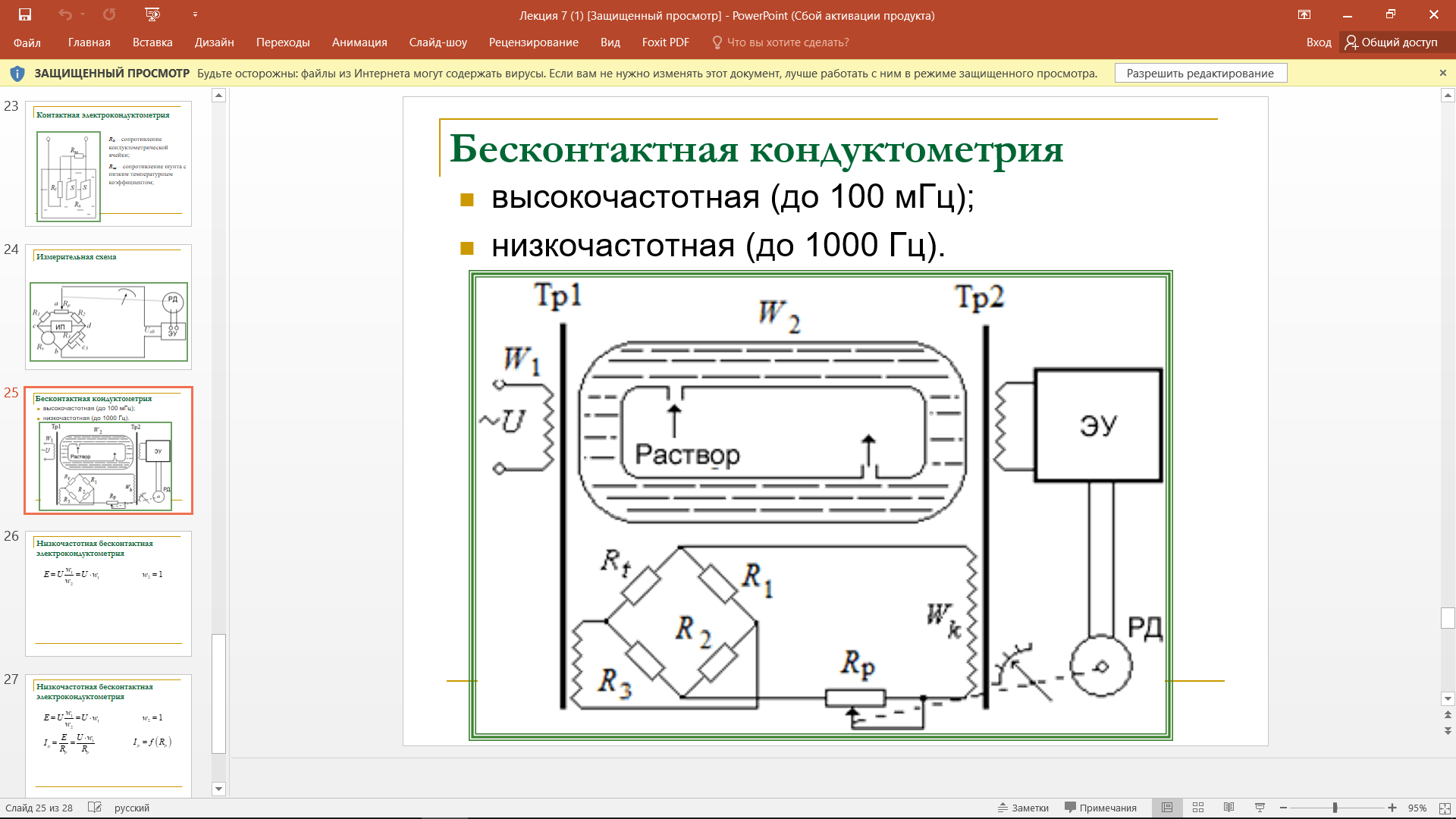
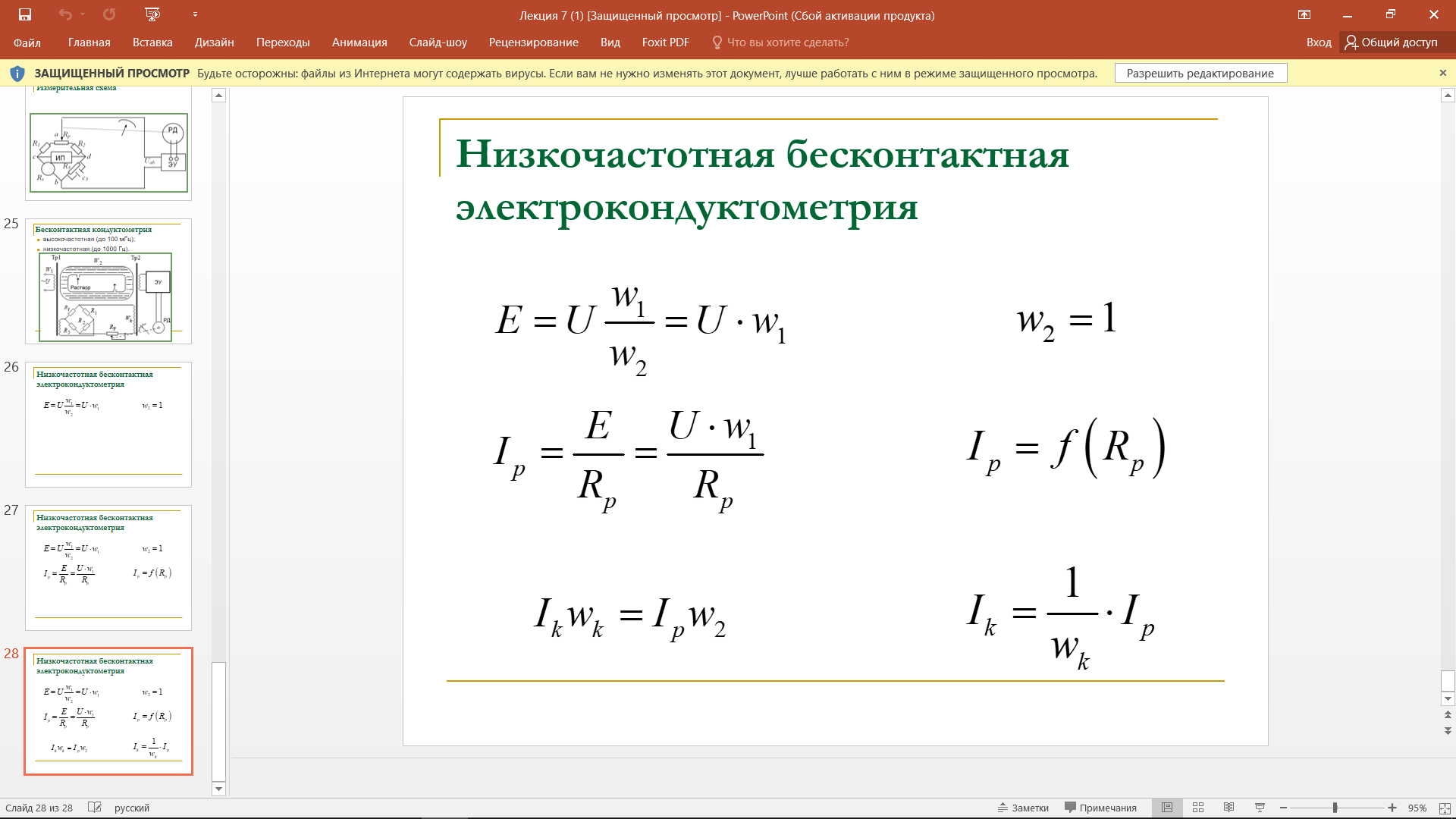
8. Контроль состава и физических свойств веществ. Электрокондуктометрия контактная и бесконтактная.
n Задача анализа – определение содержания одного или нескольких компонентов в смеси.
n Анализатор – это прибор для определения состава.
Если анализатор предназначен только для определения одного компонента в смеси, то его часто называют концентратомером.
Метод измерения концентрации.
n Прямые (лабораторные)
q Титрование;
q Метод химического поглощения;
Косвенные (производственные)
q электрокондуктометрический;
q потенциометрический;
q абсорбционный спектральный;
q рефрактометрический;
q термокондуктометрический;
q термохимический;
q термомагнитный;
q по температурной депрессии;
q по давлению насыщенных паров;
q хроматографический метод.