
АСР в зависимости от свойств системы в установившемся режиме разделяют на статические и астатические.








Статические системы характеризуются наличием остаточного отклонения регулируемой величины в установившемся состоянии равновесия, а величина отклонения при этом зависит от величины возмущающего воздействия на объект.
Астатические системы характеризуются отсутствием остаточных отклонений в установившемся состоянии равновесия.
Для статистической АСР (рис. 3.3,а) характерно то, что в установившемся состоянии количество расходуемой жидкости Qнагр (нагрузка) равно количеству поступающей через регулирующий орган жидкости Qпит. Следовательно при изменении Qнагр будет устанавливаться новое состояние равновесия со значением уровня h, которому будут соответствовать новое положение регулируемого органа (РО) и новое количество поступающей жидкости. Таким образом, новое значение регулируемой величины hуст в установившемся состоянии будет несколько отличаться от hзад, т.к. новому положению РО соответствует новое положение чувствительного элемента (поплавка), соответствующее h.
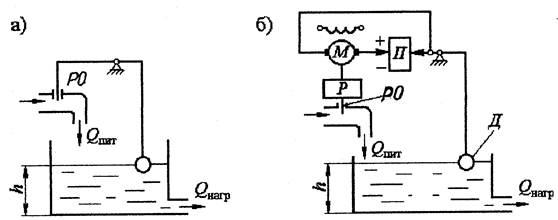
Рис 3.3. АСР уровня жидкости статическая (а) и астатическая (б).
Для астатической АСР уровня (рис 3.3,б) характерно то, что при отклонении уровня от состояния равновесия появляется разбаланс потенциометра П, сигнал с которого подается на двигатель М. Последний через редуктор Р перемещает РО (заслонку), изменяя количество подливаемой жидкости Qпит. Уровень жидкости восстанавливается до исходного (заданного) значения, при котором восстанавливается баланс потенциометра и двигатель М останавливается.
По способу передачи сигналов между элементами автоматической системы АСР подразделяются на системы непрерывного и дискретного действия.
Непрерывные АСР характеризуются тем, что входная и выходная величины ее являются непрерывными функциями времени.
Дискретные (прерывистые) АСР характеризуются тем, что содержат хотя бы один элемент, в котором при непрерывном изменении входного сигнала выходной сигнал изменяется дискретно.
Автоматические системы бывают линейными и нелинейными.
Линейные системы описываются линейными уравнениями.