
Аппарат или группа аппаратов, в которых протекает управляемый процесс, называется объектом управления.








1. Автоматические системы управления. Основные понятия управления технологическими процессами.
n Контроль режимных параметров процесса;
n Качество сырья;
n Качество промежуточных и конечных продуктов;
n Уровень пожаро- и взрывоопасности производств.
Управление – это целенаправленное воздействие на технологический процесс, с целью обеспечения оптимальных условий его функционирования.
Аппарат или группа аппаратов, в которых протекает управляемый процесс, называется объектом управления.
Автоматизированные системы управления в зависимости от объекта управления подразделяют:
· на автоматизированные системы управления технологическими
процессами (АСУ ТП);
· автоматизированные системы управления производствами;
· автоматизированные системы управления предприятиями.
Автоматизированные системы управления технологическими процессами (АСУ ТП) принято относить к классу человеко-машинных систем, когда решения по управлению технологическим процессом вместе
с техническими средствами (вычислительный комплекс) принимает оператор-человек.
2. Структурная схема автоматической системы регулирования. Принципы и законы регулирования.
n Первичный преобразователь преобразует измеряемую величину в сигнал удобный для передачи по каналу связи.
n Канал связи – контрольный кабель, трубка или кинематическая схема.
n Усилитель мощности усиливает слабый сигнал.
n Измерительное устройство сравнивает измеряемую величину с единицей измерения.
n Отсчетное устройство позволяет считывать результат измерения (шкала со стрелкой, цифровое табло или монитор компьютера).
Многие задачи управления технологическими процессами можно решить путем стабилизации технологических параметров объекта относительно их заданных значений, то есть реализовать частный случай автоматического управления, получившего название регулирование.
Регулированием называют поддержание выходных параметров
объекта относительно их заданных значений, постоянных или переменных, путем изменения подачи регулирующих воздействий. Если этот процесс осуществляется с помощью технических средств без
участия человека, то он называется автоматическим.
Под объектом регулирования понимают аппарат или совокупность аппаратов, в которых осуществляется регулируемый процесс.
Если объект имеет один регулируемый параметр y и регулирующее воздействие x, то он называется одномерным. Если объект имеет несколько
y регулируемых параметров и x регулирующих воздействий , то он называется многомерным. Если внутренние связи между регулируемыми параметрами отсутствуют или ими можно пренебречь, то такой объект называется объектом с несвязанными параметрами. Если внутренние связи между регулируемыми параметрами присутствуют, то такой объект называется объектом со связанными параметрами.
3. Автоматические системы регулирования. Классификация АСР.
Классификация АСР производится по довольно большому количеству признаков.
Все существующие системы автоматического управления можно классифицировать следующим образом:
1. По принципу управления: · САУ по возмущению; · САУ по отклонению; ·комбинированные САУ.
2. По алгоритму функционирования: · системы стабилизации (g(t) = const); · системы программного управления [g(t) - заданная f(t)]; · следящие системы (g(t) - неизвестная функция).
3. По характеру функционирования: · обычные; · адаптивные: · самонастраивающиеся; · экстремальные; · самоорганизующиеся.
4. По виду сигналов: · непрерывные; · дискретные: · цифровые; · релейные; · импульсные.
5. По виду математического описания: · линейные: · стационарные; · нестационарные; · нелинейные: · стационарные; · нестационарные.
6. По количеству координат объекта управления: · одномерные; · многомерные: · связанного управления; · несвязанного управления.
7. По энергии, используемой для перемещения регулирующего органа: · САУ прямого управления; · САУ непрямого управления.
Описание каждого.
АСР по отклонению характирезуется тем, что регулирующее воздействие на объект регулирования формируется в зависимости от отклонения текущего значения регулируемой величины от заданного. На этом принципе были разработаны первые промышленные регуляторы уровня воды И.И. Ползуновым (1765 г.) и скорости Дж. Уаттом (1784 г.).
АСР по возмущению( принцип компенсации) характеризуется тем, что измеряя возмущающее воздействие на объект регулирования и формируя соответствующее регулирующее воздействие на объект, можно обеспечить независимость работы системы от этих возмущающих воздействий. Такие АСР, инвариантные (независимые) от возмущающих воздействий (рис. 3.1), отличаются быстротой реакции и хорошими характеристиками по устойчивости и качеству регулирования. Однако сложность измерение всех возмущающих воздействий создает трудности в реализации подобных систем и поэтому они не получали широкого распространения.
Как видно из рис. 3.2, здесь измеряется не возмущение, а отклонение регулируемой величины от заданного закона изменения – ошибка Δ(t). Если
Δ (t) ≠ 0, автоматический регулятор создает регулирующее воздействие у(t)
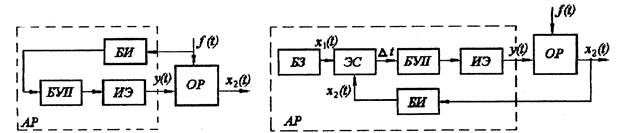
| Рис. 3.1 Функциональная схема АСР по возмущению: ОР - объект регулирования; БИ – блок измерения; БУП – блок управления; ИЭ – исполнительный элемент; f(t)- возмущающее воздействие; АР – автоматический регулятор. | Рис. 3.2. Функциональная схема АСР пол отклонению: ОР – объект регулирования; БИ – блок измерения; БЗ – блок задания; ЭС – элемент сравнения; БУП – блок управления; ИЭ – исполнительный элемент; АР – автоматический регулятор. |
на объект регулирования, ликвидирующее ошибку до допустимой величины. Системы, работающие по ошибке (отклонению), образуют замкнутый контур и поэтому называются замкнутыми системами. Благодаря наличию связи между выходом объекта и входом автоматического регулятора образуется, так называемая, обратная связь. А так как на элементе сравнения при определении ошибки происходит вычитание x2(t) из x1(t), то обратная связь называется отрицательной. Поэтому АСР, работающие по ошибке, представляют собой системы с отрицательной обратной связью, которая служит для измерения результата действия системы. Обе рассмотренные системы относятся к одноконтурным АСР.
Принцип обратной связи широко используется в технике, не только в АСР. То есть обратные связи присутствуют в измерительных и вычислительных устройствах, усилителях и т. д. Взаимодействие человека с различными техническими устройствами часто также происходит при наличии обратных связей, т.к. человек постоянно контролирует результат своего вмешательства в работу того или иного устройства, агрегата и т.п. Таким образом, принцип обратной связи является одним из основных принципов управления и регулирования, а АСР, работающие по ошибке, наиболее распространены в различных отраслях промышленности.
Однако АСР по отклонению имеют и определенный недостаток: чтобы ликвидировать отклонение регулируемой величины от заданного значения, необходимо наличие этого отклонения, тогда как в АСР по возмущению ликвидируется сама причина возникновения ошибки. Объединением обоих принципов регулирования в одной АСР создается комбинированная АСР, лишенная недостатков каждой из систем в отдельности. Наличие в ней разомкнутого контура обеспечивает независимость регулируемой величины от одного из наиболее значительного по своему влиянию возмущения. А наличие замкнутого контура (обратной связи) ликвидируют влияние всех других возмущающих воздействий и неточностей компенсации.
По характеру изменения заданного значения регулируемой величины xзд(t) = x1(t) АСР подразделяются на:
системы стабилизации, предназначенные для поддержания заданного значения регулируемой величины объекта, xзд(t) = const;
системы программного регулирования, в которых регулируемая величина объекта изменяется по заданной программе, xзд(t) = f (t);
следящие системы регулирования, в которых характер изменения выходной величины зависит от характера изменения какой-либо входной величины объекта, xзд(t) ≠ f(t).